Proximity Operations for the Robotic Boulder Capture Option for the Asteroid Redirect Mission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

7Th IAA Planetary Defense Conference – PDC 2021 26
7th IAA Planetary Defense Conference – PDC 2021 1 26-30 April 2021, Vienna, Austria IAA-PDC-21-11-37 Precautionary Planetary Defence Aaron C. Boley(1), Michael Byers(2) (1)(2)Outer Space Institute University of British Columbia 325-6224 Agricultural Road Vancouver, BC V6T 1Z1 Canada +1-604-827-2641 [email protected] Keywords: Asteroids, Precautionary Principle, Decision-Making, Active Management visiting the asteroid before the 2029 close approach Introduction: The question of whether to attempt leads us to ask, in a general sense, to what degree deflections during planetary defence emergencies has might restraint be prudent? been subject to considerable decision-making analysis As discussed by Chesley and Farnocchia (2021), if a (Schmidt 2018; SMPAG Ad-Hoc Working Group on Legal mission to an asteroid with a rich set of keyholes, like Issues 2020). Hypothetical situations usually involve a Apophis, goes awry and unintentionally collides with the newly discovered asteroid with a high impact probability asteroid, there is a risk that this will create a future on a set timescale. This paper addresses two further impact emergency. The publicity associated with the complexities: (1) limiting missions to an asteroid due to asteroid’s close approach could also prompt non-state the risk of a human-caused Earth impact; and (2) active actors to launch their own missions as technology management of asteroids to place them in “safe demonstrations and/or profile-raising exercises, much harbours”, even when impact risks are otherwise below like the infamous Tesla launch by SpaceX. “decision to act” thresholds. We use Apophis as a case Adding to these considerations is a potential traffic study, and address the two complexities in turn. -

Planetary Science Division Status Report
Planetary Science Division Status Report Jim Green NASA, Planetary Science Division January 26, 2017 Astronomy and Astrophysics Advisory CommiBee Outline • Planetary Science ObjecFves • Missions and Events Overview • Flight Programs: – Discovery – New FronFers – Mars Programs – Outer Planets • Planetary Defense AcFviFes • R&A Overview • Educaon and Outreach AcFviFes • PSD Budget Overview New Horizons exploresPlanetary Science Pluto and the Kuiper Belt Ascertain the content, origin, and evoluFon of the Solar System and the potenFal for life elsewhere! 01/08/2016 As the highest resolution images continue to beam back from New Horizons, the mission is onto exploring Kuiper Belt Objects with the Long Range Reconnaissance Imager (LORRI) camera from unique viewing angles not visible from Earth. New Horizons is also beginning maneuvers to be able to swing close by a Kuiper Belt Object in the next year. Giant IcebergsObjecve 1.5.1 (water blocks) floatingObjecve 1.5.2 in glaciers of Objecve 1.5.3 Objecve 1.5.4 Objecve 1.5.5 hydrogen, mDemonstrate ethane, and other frozenDemonstrate progress gasses on the Demonstrate Sublimation pitsDemonstrate from the surface ofDemonstrate progress Pluto, potentially surface of Pluto.progress in in exploring and progress in showing a geologicallyprogress in improving active surface.in idenFfying and advancing the observing the objects exploring and understanding of the characterizing objects The Newunderstanding of Horizons missionin the Solar System to and the finding locaons origin and evoluFon in the Solar System explorationhow the chemical of Pluto wereunderstand how they voted the where life could of life on Earth to that pose threats to and physical formed and evolve have existed or guide the search for Earth or offer People’sprocesses in the Choice for Breakthrough of thecould exist today life elsewhere resources for human Year forSolar System 2015 by Science Magazine as exploraon operate, interact well as theand evolve top story of 2015 by Discover Magazine. -

An Overview of Hayabusa2 Mission and Asteroid 162173 Ryugu
Asteroid Science 2019 (LPI Contrib. No. 2189) 2086.pdf AN OVERVIEW OF HAYABUSA2 MISSION AND ASTEROID 162173 RYUGU. S. Watanabe1,2, M. Hira- bayashi3, N. Hirata4, N. Hirata5, M. Yoshikawa2, S. Tanaka2, S. Sugita6, K. Kitazato4, T. Okada2, N. Namiki7, S. Tachibana6,2, M. Arakawa5, H. Ikeda8, T. Morota6,1, K. Sugiura9,1, H. Kobayashi1, T. Saiki2, Y. Tsuda2, and Haya- busa2 Joint Science Team10, 1Nagoya University, Nagoya 464-8601, Japan ([email protected]), 2Institute of Space and Astronautical Science, JAXA, Japan, 3Auburn University, U.S.A., 4University of Aizu, Japan, 5Kobe University, Japan, 6University of Tokyo, Japan, 7National Astronomical Observatory of Japan, Japan, 8Research and Development Directorate, JAXA, Japan, 9Tokyo Institute of Technology, Japan, 10Hayabusa2 Project Summary: The Hayabusa2 mission reveals the na- Combined with the rotational motion of the asteroid, ture of a carbonaceous asteroid through a combination global surveys of Ryugu were conducted several times of remote-sensing observations, in situ surface meas- from ~20 km above the sub-Earth point (SEP), includ- urements by rovers and a lander, an active impact ex- ing global mapping from ONC-T (Fig. 1) and TIR, and periment, and analyses of samples returned to Earth. scan mapping from NIRS3 and LIDAR. Descent ob- Introduction: Asteroids are fossils of planetesi- servations covering the equatorial zone were performed mals, building blocks of planetary formation. In partic- from 3-7 km altitudes above SEP. Off-SEP observa- ular carbonaceous asteroids (or C-complex asteroids) tions of the polar regions were also conducted. Based are expected to have keys identifying the material mix- on these observations, we constructed two types of the ing in the early Solar System and deciphering the global shape models (using the Structure-from-Motion origin of water and organic materials on Earth [1]. -

Enhanced Gravity Tractor Technique for Planetary Defense
4th IAA Planetary Defense Conference – PDC 2015 13-17 April 2015, Frascati, Roma, Italy IAA-PDC-15-04-11 ENHANCED GRAVITY TRACTOR TECHNIQUE FOR PLANETARY DEFENSE Daniel D. Mazanek(1), David M. Reeves(2), Joshua B. Hopkins(3), Darren W. Wade(4), Marco Tantardini(5), and Haijun Shen(6) (1)NASA Langley Research Center, Mail Stop 462, 1 North Dryden Street, Hampton, VA, 23681, USA, 1-757-864-1739, (2) NASA Langley Research Center, Mail Stop 462, 1 North Dryden Street, Hampton, VA, 23681, USA, 1-757-864-9256, (3)Lockheed Martin Space Systems Company, Mail Stop H3005, PO Box 179, Denver, CO 80201, USA, 1-303- 971-7928, (4)Lockheed Martin Space Systems Company, Mail Stop S8110, PO Box 179, Denver, CO 80201, USA, 1-303-977-4671, (5)Independent, via Tibaldi 5, Cremona, Italy, +393381003736, (6)Analytical Mechanics Associates, Inc., 21 Enterprise Parkway, Suite 300, Hampton, VA 23666, USA, 1-757-865-0000, Keywords: enhanced gravity tractor, in-situ mass augmentation, asteroid and comet deflection, planetary defense, low-thrust, high-efficiency propulsion, gravitational attraction, robotic mass collection Abstract Given sufficient warning time, Earth-impacting asteroids and comets can be deflected with a variety of different “slow push/pull” techniques. The gravity tractor is one technique that uses the gravitational attraction of a rendezvous spacecraft to the impactor and a low-thrust, high-efficiency propulsion system to provide a gradual velocity change and alter its trajectory. An innovation to this technique, known as the Enhanced Gravity Tractor (EGT), uses mass collected in-situ to augment the mass of the spacecraft, thereby greatly increasing the gravitational force between the objects. -
Stardust Sample Return
National Aeronautics and Space Administration Stardust Sample Return Press Kit January 2006 www.nasa.gov Contacts Merrilee Fellows Policy/Program Management (818) 393-0754 NASA Headquarters, Washington DC Agle Stardust Mission (818) 393-9011 Jet Propulsion Laboratory, Pasadena, Calif. Vince Stricherz Science Investigation (206) 543-2580 University of Washington, Seattle, Wash. Contents General Release ............................................................................................................... 3 Media Services Information ……………………….................…………….................……. 5 Quick Facts …………………………………………..................………....…........…....….. 6 Mission Overview …………………………………….................……….....……............…… 7 Recovery Timeline ................................................................................................ 18 Spacecraft ………………………………………………..................…..……...........……… 20 Science Objectives …………………………………..................……………...…..........….. 28 Why Stardust?..................…………………………..................………….....………............... 31 Other Comet Missions .......................................................................................... 33 NASA's Discovery Program .................................................................................. 36 Program/Project Management …………………………........................…..…..………...... 40 1 2 GENERAL RELEASE: NASA PREPARES FOR RETURN OF INTERSTELLAR CARGO NASA’s Stardust mission is nearing Earth after a 2.88 billion mile round-trip journey -

Deflecting a Hazardous Near-Earth Object 1St IAA Planetary Defense
Deflecting a Hazardous Near-Earth Object 1st IAA Planetary Defense Conference: Protecting Earth from Asteroids 27-30 April 2009 Granada, Spain D.K. Yeomans(1), S. Bhaskaran(1), S.B. Broschart(1), S.R. Chesley(1), P.W. Chodas(1), T. H. Sweetser(1), R. Schweickart(2) (1)JPL/Caltech 4800 Oak Grove Drive Pasadena, CA 91109, USA [email protected] ( 2)B612 Foundation 760 Fifth St. East Sonoma, CA 95476, USA [email protected] INTRODUCTION This short report on Near-Earth Object (NEO) hazard mitigation strategies was developed in response to a request for information by the U.S. National Research Council’s Space Sciences Board on December 17, 2008 and for the Planetary Defense Conference that took place 27-30 April 2009 in Granada Spain. Although we present example simulations for specific techniques that could be employed to deflect an Earth threatening NEO, our primary goal is to discuss some of the general principles and techniques that would be germane to all NEO deflection scenarios. This report summarizes work that was carried out in early 2009 and extends an earlier, more detailed study carried out in late 2008 [1]. STUDY OVERVIEW Because of the wide range of possible sizes, trajectories and warning times for Earth threatening NEOs, there will be a corresponding range in the levels of challenge in providing an appropriate mitigation response. Unless there are decades of warning time, hazardous NEOs larger than a few hundred meters in diameter may require large energies to deflect or fragment. In these cases, nuclear explosions, either stand- off or surface blasts, might provide a suitable response. -

Space Propulsion.Pdf
Deep Space Propulsion K.F. Long Deep Space Propulsion A Roadmap to Interstellar Flight K.F. Long Bsc, Msc, CPhys Vice President (Europe), Icarus Interstellar Fellow British Interplanetary Society Berkshire, UK ISBN 978-1-4614-0606-8 e-ISBN 978-1-4614-0607-5 DOI 10.1007/978-1-4614-0607-5 Springer New York Dordrecht Heidelberg London Library of Congress Control Number: 2011937235 # Springer Science+Business Media, LLC 2012 All rights reserved. This work may not be translated or copied in whole or in part without the written permission of the publisher (Springer Science+Business Media, LLC, 233 Spring Street, New York, NY 10013, USA), except for brief excerpts in connection with reviews or scholarly analysis. Use in connection with any form of information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed is forbidden. The use in this publication of trade names, trademarks, service marks, and similar terms, even if they are not identified as such, is not to be taken as an expression of opinion as to whether or not they are subject to proprietary rights. Printed on acid-free paper Springer is part of Springer Science+Business Media (www.springer.com) This book is dedicated to three people who have had the biggest influence on my life. My wife Gemma Long for your continued love and companionship; my mentor Jonathan Brooks for your guidance and wisdom; my hero Sir Arthur C. Clarke for your inspirational vision – for Rama, 2001, and the books you leave behind. Foreword We live in a time of troubles. -

Asteroid Deflection Using a Solar-Sailed Electromagnetic Gravity Tractor
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 06 | June 2020 www.irjet.net p-ISSN: 2395-0072 Asteroid Deflection using a Solar-Sailed Electromagnetic Gravity Tractor Parvati Rajesh Student, Department of Mechanical Engineering, Presidency University, Itgalpur, Rajanakunte, Yelahanka, Bengaluru, Karnataka, Pin Code- 560064, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract – An asteroid threat is one of the topics in science which gets less coverage. If an asteroid as small as 200m were to collide with earth, that would annihilate modern infrastructure and cause significant losses in biodiversity. One such theoretical solution developed to prevent this from occurring is a Gravity Tractor. A Gravity Tractor is a theoretical spacecraft which aims to alter the trajectory of an asteroid which is on the course to collide with earth. Although there have been numerous anticipated designs and alterations in this subject matter, this paper intends to suggest an idea of a gravity tractor integrated with a solar sail for solar- electric propulsion coupled with a feature of electromagnetism to exert a stronger attraction force on the asteroid if it is made out of a metallic core. Figure 1 Key Words: Asteroid, Gravity tractor, Threat Assuming the asteroid shown in the figure above is at mitigation, asteroid collision, space craft, least a 100 light years away and has been detected by Gravitational towing, Near Earth Objects, planetary defenses of various space agencies ,other electromagnetic spacecraft private industries or any other means, if a tractor is sent on time and the deflection is made at a safe 1. INTRODUCTION distance, a small deflection (α) will cause a significant amount of change in course for the asteroid to he idea of a spacecraft for altering the course of an completely omit earth. -

1950 Da, 205, 269 1979 Va, 230 1991 Ry16, 183 1992 Kd, 61 1992
Cambridge University Press 978-1-107-09684-4 — Asteroids Thomas H. Burbine Index More Information 356 Index 1950 DA, 205, 269 single scattering, 142, 143, 144, 145 1979 VA, 230 visual Bond, 7 1991 RY16, 183 visual geometric, 7, 27, 28, 163, 185, 189, 190, 1992 KD, 61 191, 192, 192, 253 1992 QB1, 233, 234 Alexandra, 59 1993 FW, 234 altitude, 49 1994 JR1, 239, 275 Alvarez, Luis, 258 1999 JU3, 61 Alvarez, Walter, 258 1999 RL95, 183 amino acid, 81 1999 RQ36, 61 ammonia, 223, 301 2000 DP107, 274, 304 amoeboid olivine aggregate, 83 2000 GD65, 205 Amor, 251 2001 QR322, 232 Amor group, 251 2003 EH1, 107 Anacostia, 179 2007 PA8, 207 Anand, Viswanathan, 62 2008 TC3, 264, 265 Angelina, 175 2010 JL88, 205 angrite, 87, 101, 110, 126, 168 2010 TK7, 231 Annefrank, 274, 275, 289 2011 QF99, 232 Antarctic Search for Meteorites (ANSMET), 71 2012 DA14, 108 Antarctica, 69–71 2012 VP113, 233, 244 aphelion, 30, 251 2013 TX68, 64 APL, 275, 292 2014 AA, 264, 265 Apohele group, 251 2014 RC, 205 Apollo, 179, 180, 251 Apollo group, 230, 251 absorption band, 135–6, 137–40, 145–50, Apollo mission, 129, 262, 299 163, 184 Apophis, 20, 269, 270 acapulcoite/ lodranite, 87, 90, 103, 110, 168, 285 Aquitania, 179 Achilles, 232 Arecibo Observatory, 206 achondrite, 84, 86, 116, 187 Aristarchus, 29 primitive, 84, 86, 103–4, 287 Asporina, 177 Adamcarolla, 62 asteroid chronology function, 262 Adeona family, 198 Asteroid Zoo, 54 Aeternitas, 177 Astraea, 53 Agnia family, 170, 198 Astronautica, 61 AKARI satellite, 192 Aten, 251 alabandite, 76, 101 Aten group, 251 Alauda family, 198 Atira, 251 albedo, 7, 21, 27, 185–6 Atira group, 251 Bond, 7, 8, 9, 28, 189 atmosphere, 1, 3, 8, 43, 66, 68, 265 geometric, 7 A- type, 163, 165, 167, 169, 170, 177–8, 192 356 © in this web service Cambridge University Press www.cambridge.org Cambridge University Press 978-1-107-09684-4 — Asteroids Thomas H. -

(OSIRIS-Rex) Asteroid Sample Return Mission
Planetary Defense Conference 2013 IAA-PDC13-04-16 Trajectory and Mission Design for the Origins Spectral Interpretation Resource Identification Security Regolith Explorer (OSIRIS-REx) Asteroid Sample Return Mission Mark Beckmana,1, Brent W. Barbeea,2,∗, Bobby G. Williamsb,3, Ken Williamsb,4, Brian Sutterc,5, Kevin Berrya,2 aNASA/GSFC, Code 595, 8800 Greenbelt Road, Greenbelt, MD, 20771, USA bKinetX Aerospace, Inc., 21 W. Easy St., Suite 108, Simi Valley, CA 93065, USA cLockheed Martin Space Systems Company, PO Box 179, Denver CO, 80201, MS S8110, USA Abstract The Origins Spectral Interpretation Resource Identification Security Regolith Explorer (OSIRIS-REx) mission is a NASA New Frontiers mission launching in 2016 to rendezvous with near-Earth asteroid (NEA) 101955 (1999 RQ36) in 2018, study it, and return a pristine carbonaceous regolith sample in 2023. This mission to 1999 RQ36 is motivated by the fact that it is one of the most hazardous NEAs currently known in terms of Earth collision probability, and it is also an attractive science target because it is a primitive solar system body and relatively accessible in terms of spacecraft propellant requirements. In this paper we present an overview of the design of the OSIRIS-REx mission with an emphasis on trajectory design and optimization for rendezvous with the asteroid and return to Earth following regolith sample collection. Current results from the OSIRIS-REx Flight Dynamics Team are presented for optimized primary and backup mission launch windows. Keywords: interplanetary trajectory, trajectory optimization, gravity assist, mission design, sample return, asteroid 1. Introduction The Origins Spectral Interpretation Resource Identification Security Regolith Explorer (OSIRIS-REx) mission is a NASA New Frontiers mission launching in 2016. -

Overcoming the Challenges Associated with Image-Based Mapping of Small Bodies in Preparation for the OSIRIS-Rex Mission to (101955) Bennu
Preprint of manuscript submitted to Earth and Space Science Overcoming the Challenges Associated with Image-based Mapping of Small Bodies in Preparation for the OSIRIS-REx Mission to (101955) Bennu D. N. DellaGiustina1, C. A. Bennett1, K. Becker1, D. R Golish1, L. Le Corre2, D. A. Cook3†, K. L. Edmundson3, M. Chojnacki1, S. S. Sutton1, M. P. Milazzo3, B. Carcich4, M. C. Nolan1, N. Habib1, K. N. Burke1, T. Becker1, P. H. Smith1, K. J. Walsh5, K. Getzandanner6, D. R. Wibben4, J. M. Leonard4, M. M. Westermann1, A. T. Polit1, J. N. Kidd Jr.1, C. W. Hergenrother1, W. V. Boynton1, J. Backer3, S. Sides3, J. Mapel3, K. Berry3, H. Roper1, C. Drouet d’Aubigny1, B. Rizk1, M. K. Crombie7, E. K. Kinney-Spano8, J. de León9, 10, J. L. Rizos9, 10, J. Licandro9, 10, H. C. Campins11, B. E. Clark12, H. L. Enos1, and D. S. Lauretta1 1Lunar and Planetary Laboratory, University of Arizona, Tucson, AZ, USA 2Planetary Science Institute, Tucson, AZ, USA 3U.S. Geological Survey Astrogeology Science Center, Flagstaff, AZ, USA 4KinetX Space Navigation & Flight Dynamics Practice, Simi Valley, CA, USA 5Southwest Research Institute, Boulder, CO, USA 6Goddard Spaceflight Center, Greenbelt, MD, USA 7Indigo Information Services LLC, Tucson, AZ, USA 8 MDA Systems, Ltd, Richmond, BC, Canada 9Instituto de Astrofísica de Canarias, Santa Cruz de Tenerife, Spain 10Departamento de Astrofísica, Universidad de La Laguna, Santa Cruz de Tenerife, Spain 11Department of Physics, University of Central Florida, Orlando, FL, USA 12Department of Physics and Astronomy, Ithaca College, Ithaca, NY, USA †Retired from this institution Corresponding author: Daniella N. -
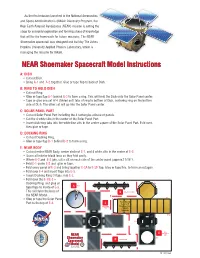
NEAR Shoemaker Spacecraft Model Instructions
As the first mission launched in the National Aeronautics and Space Administration’s (NASA) Discovery Program, the Near Earth Asteroid Rendezvous (NEAR) mission is setting the stage for asteroidal exploration and forming a base of knowledge that will be the framework for future missions. The NEAR Shoemaker spacecraft was designed and built by The Johns Hopkins University Applied Physics Laboratory, which is managing the mission for NASA. NEAR Shoemaker Spacecraft Model Instructions A: DISH • Cut out Dish. • Bring A-1 and A-2 together. Glue or tape flap to back of Dish. B: RING TO HOLD DISH • Cut out Ring. • Glue or tape flap B-1 behind B-2 to form a ring. This will hold the Dish onto the Solar Panel center. • Tape or glue one set of 4 (folded out) tabs of ring to bottom of Dish, centering ring on the bottom side of Dish. The other set will go into the Solar Panel center. C: SOLAR PANEL PART • Cut out Solar Panel Part including the 4 rectangles at base of panels. • Cut the 4 white slits in the center of the Solar Panel Part. • Insert dish/ring tabs into the white line slits in the center square of the Solar Panel Part. Fold over, then glue or tape. D: DOCKING RING • Cut out Docking Ring. • Glue or tape flap D-1 behind D-2 to form a ring. E: NEAR BODY • Cut out entire NEAR Body, center circle of E-1, and 4 white slits in the center of E-2. • Score all interior black lines so they fold easily.