Full-Text and Keyword Indexes for String Searching
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Suffix Trees, Suffix Arrays, BWT
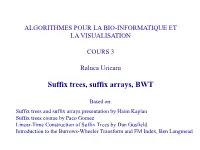
ALGORITHMES POUR LA BIO-INFORMATIQUE ET LA VISUALISATION COURS 3 Raluca Uricaru Suffix trees, suffix arrays, BWT Based on: Suffix trees and suffix arrays presentation by Haim Kaplan Suffix trees course by Paco Gomez Linear-Time Construction of Suffix Trees by Dan Gusfield Introduction to the Burrows-Wheeler Transform and FM Index, Ben Langmead Trie • A tree representing a set of strings. c { a aeef b ad e bbfe d b bbfg e c f } f e g Trie • Assume no string is a prefix of another Each edge is labeled by a letter, c no two edges outgoing from the a b same node are labeled the same. e b Each string corresponds to a d leaf. e f f e g Compressed Trie • Compress unary nodes, label edges by strings c è a a c b e d b d bbf e eef f f e g e g Suffix tree Given a string s a suffix tree of s is a compressed trie of all suffixes of s. Observation: To make suffixes prefix-free we add a special character, say $, at the end of s Suffix tree (Example) Let s=abab. A suffix tree of s is a compressed trie of all suffixes of s=abab$ { $ a b $ b b$ $ ab$ a a $ b bab$ b $ abab$ $ } Trivial algorithm to build a Suffix tree a b Put the largest suffix in a b $ a b b a Put the suffix bab$ in a b b $ $ a b b a a b b $ $ Put the suffix ab$ in a b b a b $ a $ b $ a b b a b $ a $ b $ Put the suffix b$ in a b b $ a a $ b b $ $ a b b $ a a $ b b $ $ Put the suffix $ in $ a b b $ a a $ b b $ $ $ a b b $ a a $ b b $ $ We will also label each leaf with the starting point of the corresponding suffix. -

Suffix Trees and Suffix Arrays in Primary and Secondary Storage Pang Ko Iowa State University
Iowa State University Capstones, Theses and Retrospective Theses and Dissertations Dissertations 2007 Suffix trees and suffix arrays in primary and secondary storage Pang Ko Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/rtd Part of the Bioinformatics Commons, and the Computer Sciences Commons Recommended Citation Ko, Pang, "Suffix trees and suffix arrays in primary and secondary storage" (2007). Retrospective Theses and Dissertations. 15942. https://lib.dr.iastate.edu/rtd/15942 This Dissertation is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Suffix trees and suffix arrays in primary and secondary storage by Pang Ko A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Computer Engineering Program of Study Committee: Srinivas Aluru, Major Professor David Fern´andez-Baca Suraj Kothari Patrick Schnable Srikanta Tirthapura Iowa State University Ames, Iowa 2007 UMI Number: 3274885 UMI Microform 3274885 Copyright 2007 by ProQuest Information and Learning Company. All rights reserved. This microform edition is protected against unauthorized copying under Title 17, United States Code. ProQuest Information and Learning Company 300 North Zeeb Road P.O. Box 1346 Ann Arbor, MI 48106-1346 ii DEDICATION To my parents iii TABLE OF CONTENTS LISTOFTABLES ................................... v LISTOFFIGURES .................................. vi ACKNOWLEDGEMENTS. .. .. .. .. .. .. .. .. .. ... .. .. .. .. vii ABSTRACT....................................... viii CHAPTER1. INTRODUCTION . 1 1.1 SuffixArrayinMainMemory . -

Space-Efficient K-Mer Algorithm for Generalised Suffix Tree
International Journal of Information Technology Convergence and Services (IJITCS) Vol.7, No.1, February 2017 SPACE-EFFICIENT K-MER ALGORITHM FOR GENERALISED SUFFIX TREE Freeson Kaniwa, Venu Madhav Kuthadi, Otlhapile Dinakenyane and Heiko Schroeder Botswana International University of Science and Technology, Botswana. ABSTRACT Suffix trees have emerged to be very fast for pattern searching yielding O (m) time, where m is the pattern size. Unfortunately their high memory requirements make it impractical to work with huge amounts of data. We present a memory efficient algorithm of a generalized suffix tree which reduces the space size by a factor of 10 when the size of the pattern is known beforehand. Experiments on the chromosomes and Pizza&Chili corpus show significant advantages of our algorithm over standard linear time suffix tree construction in terms of memory usage for pattern searching. KEYWORDS Suffix Trees, Generalized Suffix Trees, k-mer, search algorithm. 1. INTRODUCTION Suffix trees are well known and powerful data structures that have many applications [1-3]. A suffix tree has various applications such as string matching, longest common substring, substring matching, index-at, compression and genome analysis. In recent years it has being applied to bioinformatics in genome analysis which involves analyzing huge data sequences. This includes, finding a short sample sequence in another sequence, comparing two sequences or finding some types of repeats. In biology, repeats found in genomic sequences are broadly classified into two, thus interspersed (spaced to each other) and tandem repeats (occur next to each other). Tandem repeats are further classified as micro-satellites, mini-satellites and satellites. -

String Matching and Suffix Tree BLAST (Altschul Et Al'90)
String Matching and Suffix Tree Gusfield Ch1-7 EECS 458 CWRU Fall 2004 BLAST (Altschul et al’90) • Idea: true match alignments are very likely to contain a short segment that identical (or very high score). • Consider every substring (seed) of length w, where w=12 for DNA and 4 for protein. • Find the exact occurrence of each substring (how?) • Extend the hit in both directions and stop at the maximum score. 1 Problems • Pattern matching: find the exact occurrences of a given pattern in a given structure ( string matching) • Pattern recognition: recognizing approximate occurences of a given patttern in a given structure (image recognition) • Pattern discovery: identifying significant patterns in a given structure, when the patterns are unknown (promoter discovery) Definitions • String S[1..m] • Substring S[i..j] •Prefix S[1..i] • Suffix S[i..m] • Proper substring, prefix, suffix • Exact matching problem: given a string P called pattern, and a long string T called text, find all the occurrences of P in T. Naïve method • Align the left end of P with the left end of T • Compare letters of P and T from left to right, until – Either a mismatch is found (not an occurrence – Or P is exhausted (an occurrence) • Shift P one position to the right • Restart the comparison from the left end of P • Repeat the process till the right end of P shifts past the right end of T • Time complexity: worst case θ(mn), where m=|P| and n=|T| • Not good enough! 2 Speedup • Ideas: – When mismatch occurs, shift P more than one letter, but never shift so far as to miss an occurrence – After shifting, ship over parts of P to reduce comparisons – Preprocessing of P or T Fundamental preprocessing • Can be on pattern P or text T. -
Text Algorithms
Text Algorithms Jaak Vilo 2015 fall Jaak Vilo MTAT.03.190 Text Algorithms 1 Topics • Exact matching of one paern(string) • Exact matching of mulDple paerns • Suffix trie and tree indexes – Applicaons • Suffix arrays • Inverted index • Approximate matching Exact paern matching • S = s1 s2 … sn (text) |S| = n (length) • P = p1p2..pm (paern) |P| = m • Σ - alphabet | Σ| = c • Does S contain P? – Does S = S' P S" fo some strings S' ja S"? – Usually m << n and n can be (very) large Find occurrences in text P S Algorithms One-paern Mul--pa'ern • Brute force • Aho Corasick • Knuth-Morris-Pra • Commentz-Walter • Karp-Rabin • Shi]-OR, Shi]-AND • Boyer-Moore Indexing • • Factor searches Trie (and suffix trie) • Suffix tree Anima-ons • h@p://www-igm.univ-mlv.fr/~lecroq/string/ • EXACT STRING MATCHING ALGORITHMS Anima-on in Java • ChrisDan Charras - Thierry Lecroq Laboratoire d'Informaque de Rouen Université de Rouen Faculté des Sciences et des Techniques 76821 Mont-Saint-Aignan Cedex FRANCE • e-mails: {Chrisan.Charras, Thierry.Lecroq} @laposte.net Brute force: BAB in text? ABACABABBABBBA BAB Brute Force P i i+j-1 S j IdenDfy the first mismatch! Queson: §Problems of this method? L §Ideas to improve the search? J Brute force attempt 1: gcatcgcagagagtatacagtacg Algorithm Naive GCAg.... attempt 2: Input: Text S[1..n] and gcatcgcagagagtatacagtacg paern P[1..m] g....... attempt 3: Output: All posiDons i, where gcatcgcagagagtatacagtacg g....... P occurs in S attempt 4: gcatcgcagagagtatacagtacg g....... for( i=1 ; i <= n-m+1 ; i++ ) attempt 5: gcatcgcagagagtatacagtacg for ( j=1 ; j <= m ; j++ ) g...... -

4. Suffix Trees and Arrays
Let us analyze the average case time complexity of the verification phase. The best pattern partitioning is as even as possible. Then each pattern Many variations of the algorithm have been suggested: • factor has length at least r = m/(k + 1) . b c The expected number of exact occurrences of a random string of The filtration can be done with a different multiple exact string • • length r in a random text of length n is at most n/σr. matching algorithm. The expected total verification time is at most The verification time can be reduced using a technique called • • hierarchical verification. m2(k + 1)n m3n . O σr ≤ O σr The pattern can be partitioned into fewer than k + 1 pieces, which are • searched allowing a small number of errors. This is (n) if r 3 log m. O ≥ σ A lower bound on the average case time complexity is Ω(n(k + log m)/m), The condition r 3 logσ m is satisfied when (k + 1) m/(3 logσ m + 1). σ • ≥ ≤ and there exists a filtering algorithm matching this bound. Theorem 3.24: The average case time complexity of the Baeza-Yates–Perleberg algorithm is (n) when k m/(3 log m + 1) 1. O ≤ σ − 153 154 4. Suffix Trees and Arrays Let T = T [0..n) be the text. For i [0..n], let Ti denote the suffix T [i..n). Summary: Approximate String Matching ∈ Furthermore, for any subset C [0..n], we write T = Ti i C . In ∈ C { | ∈ } We have seen two main types of algorithms for approximate string matching: particular, T[0..n] is the set of all suffixes of T . -

Modifications of the Landau-Vishkin Algorithm Computing Longest
Modifications of the Landau-Vishkin Algorithm Computing Longest Common Extensions via Suffix Arrays and Efficient RMQ computations Rodrigo C´esar de Castro Miranda1, Mauricio Ayala-Rinc´on1, and Leon Solon1 Instituto de CiˆenciasExatas,Universidade de Bras´ılia [email protected],[email protected],[email protected] Abstract. Approximate string matching is an important problem in Computer Science. The standard solution for this problem is an O(mn) running time and space dynamic programming algorithm for two strings of length m and n. Lan- dau and Vishkin developed an algorithm which uses suffix trees for accelerating the computation along the dynamic programming table and reaching space and running time in O(nk), where n > m and k is the maximum number of ad- missible differences. In the Landau and Vishkin algorithm suffix trees are used for pre-processing the sequences allowing an O(1) running time computation of the longest common extensions between substrings. We present two O(n) space variations of the Landau and Vishkin algorithm that use range-minimum-queries (RMQ) over the longest common prefix array of an extended suffix array instead of suffix trees for computing the longest common extensions: one which computes the RMQ with a lowest common ancestor query over a Cartesian tree and other that applies the succinct RMQ computation developed by Fischer and Heun. 1 Introduction Matching strings with errors is an important problem in Computer Science, with ap- plications that range from word processing to text databases and biological sequence alignment. The standard algorithm for approximate string matching is a dynamic pro- gramming algorithm with O(mn) running-time and space complexity, for strings of size m and n. -
EECS730: Introduction to Bioinformatics
EECS730: Introduction to Bioinformatics Lecture 16: Next-generation sequencing http://blog.illumina.com/images/default-source/Blog/next-generation-sequencing.jpg?sfvrsn=0 Some slides were adapted from Dr. Shaojie Zhang (University of Central Florida), Karl Kingsford (Carnegie Mellon University), and Ben Langmead (John Hopkins University) Why sequencing Shyr and Liu, 2013 Sequencing using microarray http://homes.cs.washington.edu/~dcjones/assembly-primer/kmers.png Sequencing advantages • Unbiased detection of novel transcripts: Unlike arrays, sequencing technology does not require species- or transcript-specific probes. It can detect novel transcripts, gene fusions, single nucleotide variants, indels (small insertions and deletions), and other previously unknown changes that arrays cannot detect. • Broader dynamic range: With array hybridization technology, gene expression measurement is limited by background at the low end and signal saturation at the high end. Sequencing technology quantifies discrete, digital sequencing read counts, offering a broader dynamic range. • Easier detection of rare and low-abundance transcripts: Sequencing coverage depth can easily be increased to detect rare transcripts, single transcripts per cell, or weakly expressed genes. http://www.illumina.com/technology/next-generation-sequencing/mrna-seq.html Outline of sequencing mechanism • Take the target DNA molecule as a template • Utilize signals that are emitted when incorporating different nucleic acids • Read out and parse the signal to determine the sequence of the DNA Sanger sequencing • Developed by Frederick Sanger (shared the 1980 Nobel Prize) and colleagues in 1977, it was the most widely used sequencing method for approximately 39 years. • Gold standard for sequencing today • Accurate (>99.99% accuracy) and produce long reads (>500bp) • Relatively expensive ($2400 per 1Mbp) and low throughput Sanger sequencing • This method begins with the use of special enzymes to synthesize fragments of DNA that terminate when a selected base appears in the stretch of DNA being sequenced. -

Construction of Aho Corasick Automaton in Linear Time for Integer Alphabets
Construction of Aho Corasick Automaton in Linear Time for Integer Alphabets Shiri Dori∗ Gad M. Landau† University of Haifa University of Haifa & Polytechnic University Abstract We present a new simple algorithm that constructs an Aho Corasick automaton for a set of patterns, P , of total length n, in O(n) time and space for integer alphabets. Processing a text of size m over an alphabet Σ with the automaton costs O(m log |Σ|+k), where there are k occurrences of patterns in the text. A new, efficient implementation of nodes in the Aho Corasick automaton is introduced, which works for suffix trees as well. Key words: Design of Algorithms, String Matching, Suffix Tree, Suffix Array. 1 Introduction The exact set matching problem [7] is defined as finding all occurrences in a text T of size m, of any pattern in a set of patterns, P = {P1,P2, ..., Pq}, of cumulative size n over an alphabet Σ. The classic data structure solving this problem is the automaton proposed by Aho and Corasick [2]. It is constructed in O(n log |Σ|) preprocessing time and has O(m log |Σ|+k) search time, where k represents the number of occurrences of patterns in the text. This solution is suitable especially for applications in which a large number of patterns is known and fixed in advance, while the text varies. We will explain the data structure in detail in Section 2. The suffix tree of a string is a compact trie of all the suffixes of the string. Several algorithms construct it in linear time for a constant alphabet size [14, 16, 17]. -

Suffix Trees and Suffix Arrays Some Problems Exact String Matching Applications in Bioinformatics Suffix Trees History of Suffix
Some problems • Given a pattern P = P[1..m], find all occurrences of P in a text S = S[1..n] Suffix Trees and • Another problem: – Given two strings S [1..n ] and S [1..n ] find their Suffix Arrays 1 1 2 2 longest common substring. • find i, j, k such that S 1[i .. i+k-1] = S2[j .. j+k-1] and k is as large as possible. • Any solutions? How do you solve these problems (efficiently)? Exact string matching Applications in Bioinformatics • Finding the pattern P[1..m] in S[1..n] can be • Multiple genome alignment solved simply with a scan of the string S in – Michael Hohl et al. 2002 O(m+n) time. However, when S is very long – Longest common substring problem and we want to perform many queries, it – Common substrings of more than two strings would be desirable to have a search • Selection of signature oligonucleotides for algorithm that could take O(m) time. microarrays • To do that we have to preprocess S. The – Kaderali and Schliep, 2002 preprocessing step is especially useful in • Identification of sequence repeats scenarios where the text is relatively constant – Kurtz and Schleiermacher, 1999 over time (e.g., a genome), and when search is needed for many different patterns. Suffix trees History of suffix trees • Any string of length m can be degenerated • Weiner, 1973: suffix trees introduced, linear- into m suffixes. time construction algorithm – abcdefgh (length: 8) • McCreight, 1976: reduced space-complexity – 8 suffixes: • h, gh, fgh, efgh, defgh, cdefgh, bcefgh, abcdefgh • Ukkonen, 1995: new algorithm, easier to describe • The suffixes can be stored in a suffix-tree and this tree can be generated in O(n) time • In this course, we will only cover a naive (quadratic-time) construction. -

Suffix Trees and Their Applications
Eötvös Loránd University Faculty of Science Bálint Márk Vásárhelyi Suffix Trees and Their Applications MSc Thesis Supervisor: Kristóf Bérczi Department of Operations Research Budapest, 2013 Sux Trees and Their Applications Acknowledgements I would like to express my gratitude to my supervisor, Kristóf Bérczi, whose dedi- cated and devoted work helped and provided me with enough support to write this thesis. I would also like to thank my family that they were behind me through my entire life and without whom I could not have nished my studies. Soli Deo Gloria. - 2 - Sux Trees and Their Applications Contents Contents Introduction 5 1 Preliminaries 7 1.1 Sux tree . .7 1.2 A naive algorithm for constructing a sux tree . .8 1.3 Construct a compact sux tree in linear time . .9 1.4 Generalized sux trees . 14 2 Applications 16 2.1 Matching . 16 2.2 Longest common substring . 18 2.3 Longest common subsequence . 19 2.4 Super-string . 19 2.5 Circular string linearisation . 21 2.6 Repetitive structures . 21 2.7 DNA contamination . 24 2.8 Genome-scale projects . 24 3 String matching statistics 26 3.1 Motivation . 26 3.2 Distance of two strings . 26 3.3 Matching statistics . 27 3.4 Dynamic programming approach . 28 3.5 Adaptation for text searching . 28 4 Size of a sux tree 29 4.1 The growth of the sux tree . 29 4.2 Lower bound for the expectation of the growth . 32 4.3 Autocorrelation of a String . 34 - 3 - Sux Trees and Their Applications Contents 5 Appendix 39 5.1 The Program Used for Examining the Size of the Sux Tree . -

Suffix Trees and Their Applications in String Algorithms
Suffix Trees and their Applications in String Algorithms∗ Roberto Grossi† Giuseppe F. Italiano‡ Dipartimento di Sistemi e Informatica Dipartimento di Matematica Applicata ed Informatica Universit`adi Firenze Universit`a“Ca’ Foscari” di Venezia 50134 Firenze, Italy Venezia, Italy Keywords: Pattern matching, String algorithms, Suffix tree. Abstract: The suffix tree is a compacted trie that stores all suffixes of a given text string. This data structure has been intensively employed in pattern matching on strings and trees, with a wide range of applications, such as molecular biology, data processing, text editing, term rewriting, interpreter design, information retrieval, abstract data types and many others. In this paper, we survey some applications of suffix trees and some algorithmic techniques for their construction. Special emphasis is given to the most recent developments in this area, such as parallel algorithms for suffix tree construction and generalizations of suffix trees to higher dimensions, which are important in multidimensional pattern matching. ∗Work partially supported by the ESPRIT BRA ALCOM II under contract no. 7141 and by the Italian MURST Project “Algoritmi, Modelli di Calcolo e Strutture Informative”. †Part of this work was done while the author was visiting AT&T Bell Laboratories. Email: [email protected] ‡Work supported in part by the Commission of the European Communities under ESPRIT LTR Project no. 20244 (ALCOM–IT), by the Italian MURST Project “Efficienza di Algoritmi e Pro- getto di Strutture Informative”, and by a Research Grant from University of Venice “Ca’ Foscari”. Part of this work was done while at University of Salerno. Email: [email protected].