Astronomy 518 Astrometry Lecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Appendix a Orbits
Appendix A Orbits As discussed in the Introduction, a good ¯rst approximation for satellite motion is obtained by assuming the spacecraft is a point mass or spherical body moving in the gravitational ¯eld of a spherical planet. This leads to the classical two-body problem. Since we use the term body to refer to a spacecraft of ¯nite size (as in rigid body), it may be more appropriate to call this the two-particle problem, but I will use the term two-body problem in its classical sense. The basic elements of orbital dynamics are captured in Kepler's three laws which he published in the 17th century. His laws were for the orbital motion of the planets about the Sun, but are also applicable to the motion of satellites about planets. The three laws are: 1. The orbit of each planet is an ellipse with the Sun at one focus. 2. The line joining the planet to the Sun sweeps out equal areas in equal times. 3. The square of the period of a planet is proportional to the cube of its mean distance to the sun. The ¯rst law applies to most spacecraft, but it is also possible for spacecraft to travel in parabolic and hyperbolic orbits, in which case the period is in¯nite and the 3rd law does not apply. However, the 2nd law applies to all two-body motion. Newton's 2nd law and his law of universal gravitation provide the tools for generalizing Kepler's laws to non-elliptical orbits, as well as for proving Kepler's laws. -

Constructing a Galactic Coordinate System Based on Near-Infrared and Radio Catalogs
A&A 536, A102 (2011) Astronomy DOI: 10.1051/0004-6361/201116947 & c ESO 2011 Astrophysics Constructing a Galactic coordinate system based on near-infrared and radio catalogs J.-C. Liu1,2,Z.Zhu1,2, and B. Hu3,4 1 Department of astronomy, Nanjing University, Nanjing 210093, PR China e-mail: [jcliu;zhuzi]@nju.edu.cn 2 key Laboratory of Modern Astronomy and Astrophysics (Nanjing University), Ministry of Education, Nanjing 210093, PR China 3 Purple Mountain Observatory, Chinese Academy of Sciences, Nanjing 210008, PR China 4 Graduate School of Chinese Academy of Sciences, Beijing 100049, PR China e-mail: [email protected] Received 24 March 2011 / Accepted 13 October 2011 ABSTRACT Context. The definition of the Galactic coordinate system was announced by the IAU Sub-Commission 33b on behalf of the IAU in 1958. An unrigorous transformation was adopted by the Hipparcos group to transform the Galactic coordinate system from the FK4-based B1950.0 system to the FK5-based J2000.0 system or to the International Celestial Reference System (ICRS). For more than 50 years, the definition of the Galactic coordinate system has remained unchanged from this IAU1958 version. On the basis of deep and all-sky catalogs, the position of the Galactic plane can be revised and updated definitions of the Galactic coordinate systems can be proposed. Aims. We re-determine the position of the Galactic plane based on modern large catalogs, such as the Two-Micron All-Sky Survey (2MASS) and the SPECFIND v2.0. This paper also aims to propose a possible definition of the optimal Galactic coordinate system by adopting the ICRS position of the Sgr A* at the Galactic center. -

Ionizing Feedback from Massive Stars in Massive Clusters III: Disruption of Partially Unbound Clouds 3
Mon. Not. R. Astron. Soc. 000, 1–14 (2006) Printed 30 August 2021 (MN LATEX style file v2.2) Ionizing feedback from massive stars in massive clusters III: Disruption of partially unbound clouds J. E. Dale1⋆, B. Ercolano1, I. A. Bonnell2 1Excellence Cluster ‘Universe’, Boltzmannstr. 2, 85748 Garching, Germany. 2Department of Physics and Astronomy, University of St Andrews, North Haugh, St Andrews, Fife KY16 9SS 30 August 2021 ABSTRACT We extend our previous SPH parameter study of the effects of photoionization from O–stars on star–forming clouds to include initially unbound clouds. We generate a set 4 6 of model clouds in the mass range 10 -10 M⊙ with initial virial ratios Ekin/Epot=2.3, allow them to form stars, and study the impact of the photoionizing radiation pro- duced by the massive stars. We find that, on the 3Myr timescale before supernovae are expected to begin detonating, the fractions of mass expelled by ionizing feedback is a very strong function of the cloud escape velocities. High–mass clouds are largely unaf- fected dynamically, while lower–mass clouds have large fractions of their gas reserves expelled on this timescale. However, the fractions of stellar mass unbound are modest and significant portions of the unbound stars are so only because the clouds themselves are initially partially unbound. We find that ionization is much more able to create well–cleared bubbles in the unbound clouds, owing to their intrinsic expansion, but that the presence of such bubbles does not necessarily indicate that a given cloud has been strongly influenced by feedback. -

Basic Principles of Celestial Navigation James A
Basic principles of celestial navigation James A. Van Allena) Department of Physics and Astronomy, The University of Iowa, Iowa City, Iowa 52242 ͑Received 16 January 2004; accepted 10 June 2004͒ Celestial navigation is a technique for determining one’s geographic position by the observation of identified stars, identified planets, the Sun, and the Moon. This subject has a multitude of refinements which, although valuable to a professional navigator, tend to obscure the basic principles. I describe these principles, give an analytical solution of the classical two-star-sight problem without any dependence on prior knowledge of position, and include several examples. Some approximations and simplifications are made in the interest of clarity. © 2004 American Association of Physics Teachers. ͓DOI: 10.1119/1.1778391͔ I. INTRODUCTION longitude ⌳ is between 0° and 360°, although often it is convenient to take the longitude westward of the prime me- Celestial navigation is a technique for determining one’s ridian to be between 0° and Ϫ180°. The longitude of P also geographic position by the observation of identified stars, can be specified by the plane angle in the equatorial plane identified planets, the Sun, and the Moon. Its basic principles whose vertex is at O with one radial line through the point at are a combination of rudimentary astronomical knowledge 1–3 which the meridian through P intersects the equatorial plane and spherical trigonometry. and the other radial line through the point G at which the Anyone who has been on a ship that is remote from any prime meridian intersects the equatorial plane ͑see Fig. -

Constellations with Prominent Stars That Can Be Found Near the Meridian at 10 Pm on January 15
ONSTELLATIONS C Altitude Ruler The rotation of the Earth on its axis causes the stars to rise and set each evening. In addition, the orbit of the Earth around the Sun places different regions of the sky in our Horizon night-time view. The PLANISPHERE is an extremely useful tool for finding stars and 10 constellation in the sky, depicting not only what is currently in the sky but it also allows the 20 prediction of the rising and setting times of various celestial objects. 30 THE LAYOUT OF THE PLANISPHERE 40 50 The outer circumference of the dark blue circular disk (which is called the star wheel) you’ll notice that the wheel is divided into the 12 months, and that each month is divided into 60 individual dates. The star wheel rotates about the brass fastener, which represents the 70 North Celestial Pole. The frame of the planisphere has times along the outer edge. 80 Holding the planisphere on the southern corner you'll see "midnight" at the top. Moving Zenith counterclockwise, notice how the hours progress, through 1 AM, 2 AM, and so on through "noon" at the bottom. The hours then proceed through the afternoon and evening (1 PM, 2 PM, etc.) back toward midnight. Once you have the wheel set properly for the correct time and day, the displayed part represents what you see if you stand with the star and planet locator held directly over your head with the brass fastener toward the north. (Notice that the compass directions are also written on the corners of the frame.) Of course, you don't have to actually stand that way to make use of the Star and Planet Locator--this is just a description to help you understand what is displayed. -

Equatorial and Cartesian Coordinates • Consider the Unit Sphere (“Unit”: I.E
Coordinate Transforms Equatorial and Cartesian Coordinates • Consider the unit sphere (“unit”: i.e. declination the distance from the center of the (δ) sphere to its surface is r = 1) • Then the equatorial coordinates Equator can be transformed into Cartesian coordinates: right ascension (α) – x = cos(α) cos(δ) – y = sin(α) cos(δ) z x – z = sin(δ) y • It can be much easier to use Cartesian coordinates for some manipulations of geometry in the sky Equatorial and Cartesian Coordinates • Consider the unit sphere (“unit”: i.e. the distance y x = Rcosα from the center of the y = Rsinα α R sphere to its surface is r = 1) x Right • Then the equatorial Ascension (α) coordinates can be transformed into Cartesian coordinates: declination (δ) – x = cos(α)cos(δ) z r = 1 – y = sin(α)cos(δ) δ R = rcosδ R – z = sin(δ) z = rsinδ Precession • Because the Earth is not a perfect sphere, it wobbles as it spins around its axis • This effect is known as precession • The equatorial coordinate system relies on the idea that the Earth rotates such that only Right Ascension, and not declination, is a time-dependent coordinate The effects of Precession • Currently, the star Polaris is the North Star (it lies roughly above the Earth’s North Pole at δ = 90oN) • But, over the course of about 26,000 years a variety of different points in the sky will truly be at δ = 90oN • The declination coordinate is time-dependent albeit on very long timescales • A precise astronomical coordinate system must account for this effect Equatorial coordinates and equinoxes • To account -
Earth-Centred Universe
Earth-centred Universe The fixed stars appear on the celestial sphere Earth rotates in one sidereal day The solar day is longer by about 4 minutes → scattered sunlight obscures the stars by day The constellations are historical → learn to recognise: Ursa Major, Ursa Minor, Cassiopeia, Pegasus, Auriga, Gemini, Orion, Taurus Sun’s Motion in the Sky The Sun moves West to East against the background of Stars Stars Stars stars Us Us Us Sun Sun Sun z z z Start 1 sidereal day later 1 solar day later Compared to the stars, the Sun takes on average 3 min 56.5 sec extra to go round once The Sun does not travel quite at a constant speed, making the actual length of a solar day vary throughout the year Pleiades Stars near the Sun Sun Above the atmosphere: stars seen near the Sun by the SOHO probe Shield Sun in Taurus Image: Hyades http://sohowww.nascom.nasa.g ov//data/realtime/javagif/gifs/20 070525_0042_c3.gif Constellations Figures courtesy: K & K From The Beauty of the Heavens by C. F. Blunt (1842) The Celestial Sphere The celestial sphere rotates anti-clockwise looking north → Its fixed points are the north celestial pole and the south celestial pole All the stars on the celestial equator are above the Earth’s equator How high in the sky is the pole star? It is as high as your latitude on the Earth Motion of the Sky (animated ) Courtesy: K & K Pole Star above the Horizon To north celestial pole Zenith The latitude of Northern horizon Aberdeen is the angle at 57º the centre of the Earth A Earth shown in the diagram as 57° 57º Equator Centre The pole star is the same angle above the northern horizon as your latitude. -

And Are Lines on Sphere B That Contain Point Q
11-5 Spherical Geometry Name each of the following on sphere B. 3. a triangle SOLUTION: are examples of triangles on sphere B. 1. two lines containing point Q SOLUTION: and are lines on sphere B that contain point Q. ANSWER: 4. two segments on the same great circle SOLUTION: are segments on the same great circle. ANSWER: and 2. a segment containing point L SOLUTION: is a segment on sphere B that contains point L. ANSWER: SPORTS Determine whether figure X on each of the spheres shown is a line in spherical geometry. 5. Refer to the image on Page 829. SOLUTION: Notice that figure X does not go through the pole of ANSWER: the sphere. Therefore, figure X is not a great circle and so not a line in spherical geometry. ANSWER: no eSolutions Manual - Powered by Cognero Page 1 11-5 Spherical Geometry 6. Refer to the image on Page 829. 8. Perpendicular lines intersect at one point. SOLUTION: SOLUTION: Notice that the figure X passes through the center of Perpendicular great circles intersect at two points. the ball and is a great circle, so it is a line in spherical geometry. ANSWER: yes ANSWER: PERSEVERANC Determine whether the Perpendicular great circles intersect at two points. following postulate or property of plane Euclidean geometry has a corresponding Name two lines containing point M, a segment statement in spherical geometry. If so, write the containing point S, and a triangle in each of the corresponding statement. If not, explain your following spheres. reasoning. 7. The points on any line or line segment can be put into one-to-one correspondence with real numbers. -
Appendix: Derivations
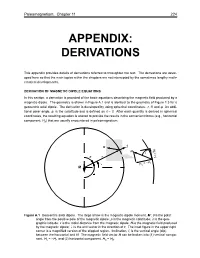
Paleomagnetism: Chapter 11 224 APPENDIX: DERIVATIONS This appendix provides details of derivations referred to throughout the text. The derivations are devel- oped here so that the main topics within the chapters are not interrupted by the sometimes lengthy math- ematical developments. DERIVATION OF MAGNETIC DIPOLE EQUATIONS In this section, a derivation is provided of the basic equations describing the magnetic field produced by a magnetic dipole. The geometry is shown in Figure A.1 and is identical to the geometry of Figure 1.3 for a geocentric axial dipole. The derivation is developed by using spherical coordinates: r, θ, and φ. An addi- tional polar angle, p, is the colatitude and is defined as π – θ. After each quantity is derived in spherical coordinates, the resulting equation is altered to provide the results in the convenient forms (e.g., horizontal component, Hh) that are usually encountered in paleomagnetism. H ^r H H h I = H p r = –Hr H v M Figure A.1 Geocentric axial dipole. The large arrow is the magnetic dipole moment, M ; θ is the polar angle from the positive pole of the magnetic dipole; p is the magnetic colatitude; λ is the geo- graphic latitude; r is the radial distance from the magnetic dipole; H is the magnetic field produced by the magnetic dipole; rˆ is the unit vector in the direction of r. The inset figure in the upper right corner is a magnified version of the stippled region. Inclination, I, is the vertical angle (dip) between the horizontal and H. The magnetic field vector H can be broken into (1) vertical compo- nent, Hv =–Hr, and (2) horizontal component, Hh = Hθ . -
Solar Engineering Basics
Solar Energy Fundamentals Course No: M04-018 Credit: 4 PDH Harlan H. Bengtson, PhD, P.E. Continuing Education and Development, Inc. 22 Stonewall Court Woodcliff Lake, NJ 07677 P: (877) 322-5800 [email protected] Solar Energy Fundamentals Harlan H. Bengtson, PhD, P.E. COURSE CONTENT 1. Introduction Solar energy travels from the sun to the earth in the form of electromagnetic radiation. In this course properties of electromagnetic radiation will be discussed and basic calculations for electromagnetic radiation will be described. Several solar position parameters will be discussed along with means of calculating values for them. The major methods by which solar radiation is converted into other useable forms of energy will be discussed briefly. Extraterrestrial solar radiation (that striking the earth’s outer atmosphere) will be discussed and means of estimating its value at a given location and time will be presented. Finally there will be a presentation of how to obtain values for the average monthly rate of solar radiation striking the surface of a typical solar collector, at a specified location in the United States for a given month. Numerous examples are included to illustrate the calculations and data retrieval methods presented. Image Credit: NOAA, Earth System Research Laboratory 1 • Be able to calculate wavelength if given frequency for specified electromagnetic radiation. • Be able to calculate frequency if given wavelength for specified electromagnetic radiation. • Know the meaning of absorbance, reflectance and transmittance as applied to a surface receiving electromagnetic radiation and be able to make calculations with those parameters. • Be able to obtain or calculate values for solar declination, solar hour angle, solar altitude angle, sunrise angle, and sunset angle. -

Rotational Motion of Electric Machines
Rotational Motion of Electric Machines • An electric machine rotates about a fixed axis, called the shaft, so its rotation is restricted to one angular dimension. • Relative to a given end of the machine’s shaft, the direction of counterclockwise (CCW) rotation is often assumed to be positive. • Therefore, for rotation about a fixed shaft, all the concepts are scalars. 17 Angular Position, Velocity and Acceleration • Angular position – The angle at which an object is oriented, measured from some arbitrary reference point – Unit: rad or deg – Analogy of the linear concept • Angular acceleration =d/dt of distance along a line. – The rate of change in angular • Angular velocity =d/dt velocity with respect to time – The rate of change in angular – Unit: rad/s2 position with respect to time • and >0 if the rotation is CCW – Unit: rad/s or r/min (revolutions • >0 if the absolute angular per minute or rpm for short) velocity is increasing in the CCW – Analogy of the concept of direction or decreasing in the velocity on a straight line. CW direction 18 Moment of Inertia (or Inertia) • Inertia depends on the mass and shape of the object (unit: kgm2) • A complex shape can be broken up into 2 or more of simple shapes Definition Two useful formulas mL2 m J J() RRRR22 12 3 1212 m 22 JRR()12 2 19 Torque and Change in Speed • Torque is equal to the product of the force and the perpendicular distance between the axis of rotation and the point of application of the force. T=Fr (Nm) T=0 T T=Fr • Newton’s Law of Rotation: Describes the relationship between the total torque applied to an object and its resulting angular acceleration. -

The Sundial Cities
The Sundial Cities Joel Van Cranenbroeck, Belgium Keywords: Engineering survey;Implementation of plans;Positioning;Spatial planning;Urban renewal; SUMMARY When observing in our modern cities the sun shade gliding along the large surfaces of buildings and towers, an observer can notice that after all the local time could be deduced from the position of the sun. The highest building in the world - the Burj Dubai - is de facto the largest sundial ever designed. The principles of sundials can be understood most easily from an ancient model of the Sun's motion. Science has established that the Earth rotates on its axis, and revolves in an elliptic orbit about the Sun; however, meticulous astronomical observations and physics experiments were required to establish this. For navigational and sundial purposes, it is an excellent approximation to assume that the Sun revolves around a stationary Earth on the celestial sphere, which rotates every 23 hours and 56 minutes about its celestial axis, the line connecting the celestial poles. Since the celestial axis is aligned with the axis about which the Earth rotates, its angle with the local horizontal equals the local geographical latitude. Unlike the fixed stars, the Sun changes its position on the celestial sphere, being at positive declination in summer, at negative declination in winter, and having exactly zero declination (i.e., being on the celestial equator) at the equinoxes. The path of the Sun on the celestial sphere is known as the ecliptic, which passes through the twelve constellations of the zodiac in the course of a year. This model of the Sun's motion helps to understand the principles of sundials.