Authentication Protocols
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fill Your Boots: Enhanced Embedded Bootloader Exploits Via Fault Injection and Binary Analysis
IACR Transactions on Cryptographic Hardware and Embedded Systems ISSN 2569-2925, Vol. 2021, No. 1, pp. 56–81. DOI:10.46586/tches.v2021.i1.56-81 Fill your Boots: Enhanced Embedded Bootloader Exploits via Fault Injection and Binary Analysis Jan Van den Herrewegen1, David Oswald1, Flavio D. Garcia1 and Qais Temeiza2 1 School of Computer Science, University of Birmingham, UK, {jxv572,d.f.oswald,f.garcia}@cs.bham.ac.uk 2 Independent Researcher, [email protected] Abstract. The bootloader of an embedded microcontroller is responsible for guarding the device’s internal (flash) memory, enforcing read/write protection mechanisms. Fault injection techniques such as voltage or clock glitching have been proven successful in bypassing such protection for specific microcontrollers, but this often requires expensive equipment and/or exhaustive search of the fault parameters. When multiple glitches are required (e.g., when countermeasures are in place) this search becomes of exponential complexity and thus infeasible. Another challenge which makes embedded bootloaders notoriously hard to analyse is their lack of debugging capabilities. This paper proposes a grey-box approach that leverages binary analysis and advanced software exploitation techniques combined with voltage glitching to develop a powerful attack methodology against embedded bootloaders. We showcase our techniques with three real-world microcontrollers as case studies: 1) we combine static and on-chip dynamic analysis to enable a Return-Oriented Programming exploit on the bootloader of the NXP LPC microcontrollers; 2) we leverage on-chip dynamic analysis on the bootloader of the popular STM8 microcontrollers to constrain the glitch parameter search, achieving the first fully-documented multi-glitch attack on a real-world target; 3) we apply symbolic execution to precisely aim voltage glitches at target instructions based on the execution path in the bootloader of the Renesas 78K0 automotive microcontroller. -
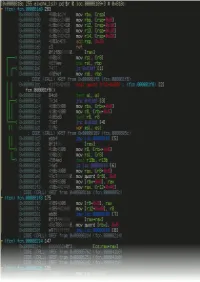
Radare2 Book
Table of Contents introduction 1.1 Introduction 1.2 History 1.2.1 Overview 1.2.2 Getting radare2 1.2.3 Compilation and Portability 1.2.4 Compilation on Windows 1.2.5 Command-line Flags 1.2.6 Basic Usage 1.2.7 Command Format 1.2.8 Expressions 1.2.9 Rax2 1.2.10 Basic Debugger Session 1.2.11 Contributing to radare2 1.2.12 Configuration 1.3 Colors 1.3.1 Common Configuration Variables 1.3.2 Basic Commands 1.4 Seeking 1.4.1 Block Size 1.4.2 Sections 1.4.3 Mapping Files 1.4.4 Print Modes 1.4.5 Flags 1.4.6 Write 1.4.7 Zoom 1.4.8 Yank/Paste 1.4.9 Comparing Bytes 1.4.10 Visual mode 1.5 Visual Disassembly 1.5.1 2 Searching bytes 1.6 Basic Searches 1.6.1 Configurating the Search 1.6.2 Pattern Search 1.6.3 Automation 1.6.4 Backward Search 1.6.5 Search in Assembly 1.6.6 Searching for AES Keys 1.6.7 Disassembling 1.7 Adding Metadata 1.7.1 ESIL 1.7.2 Scripting 1.8 Loops 1.8.1 Macros 1.8.2 R2pipe 1.8.3 Rabin2 1.9 File Identification 1.9.1 Entrypoint 1.9.2 Imports 1.9.3 Symbols (exports) 1.9.4 Libraries 1.9.5 Strings 1.9.6 Program Sections 1.9.7 Radiff2 1.10 Binary Diffing 1.10.1 Rasm2 1.11 Assemble 1.11.1 Disassemble 1.11.2 Ragg2 1.12 Analysis 1.13 Code Analysis 1.13.1 Rahash2 1.14 Rahash Tool 1.14.1 Debugger 1.15 3 Getting Started 1.15.1 Registers 1.15.2 Remote Access Capabilities 1.16 Remoting Capabilities 1.16.1 Plugins 1.17 Plugins 1.17.1 Crackmes 1.18 IOLI 1.18.1 IOLI 0x00 1.18.1.1 IOLI 0x01 1.18.1.2 Avatao 1.18.2 R3v3rs3 4 1.18.2.1 .intro 1.18.2.1.1 .radare2 1.18.2.1.2 .first_steps 1.18.2.1.3 .main 1.18.2.1.4 .vmloop 1.18.2.1.5 .instructionset 1.18.2.1.6 -

Using Static and Dynamic Binary Analysis with Ret-Sync
Bière sécu Bordeaux 1st event Date 26/02/2020 Place Zytho By Jiss – Daniel – Tiana Combining static and dynamic binary analysis ret-sync Date 26/02/2020 Place Zytho By Jean-Christophe Delaunay Context 2 approaches in reverse-engineering (RE) : static (disass/decompile) IDA, Ghidra, etc. dynamic (debug) x64dbg, WinDbg, LLDB, etc. Possible to combine both worlds in the same tool… … but often painful to use (eg. IDA dbg) Annoying to switch between multiple tools 3 / 29 Context Classical example: I’m debugging using WinDbg, I spot a routine or structure which seems interesting I’d like to know if I’ve already documented it within IDA … I need to compute the offset from the load address of my module (ASLR/relloc) … add it to the preferred load address of my module in my idb Conclusion: straightforward but painful if I have to do that every 2 minutes … even more painful provided that I use x64dbg for usermode and WinDbg for kernelmode 4 / 29 Solutions Code a new tool which would combine both worlds… 5 / 29 Solutions Code a new tool which would combine both worlds… 6 / 29 Solutions Code a new tool which would combine both worlds… Set-up a glue which would create an interface between the disass and the debugger(s)… … ret-sync by Alexandre Gazet https://github.com/bootleg/ret-sync 7 / 29 ret-sync: support Static: IDA Ghidra Dynamic: WinDbg(-preview) GDB LLDB OllyDbg 1.10 OllyDbg v2 x64dbg 8 / 29 ret-sync: features Permits to “follow” the program workflow in IDA/Ghidra view “step” in the dbg “step” in the disass static view Dynamic switching between multiple idbs trace within toto.exe trace within toto.idb toto.exe issues a call in fistouille.dll switch to fistouille.idb Automagical rebase Sending commands to the dbg (bp, hbp, lbl, etc.) Custom commands1 All features are available both in disass AND decompiled views etc. -

Android Malware and Analysis
ANDROID MALWARE AND ANALYSIS Ken Dunham • Shane Hartman Jose Andre Morales Manu Quintans • Tim Strazzere Click here to buy Android Malware and Analysis CRC Press Taylor & Francis Group 6000 Broken Sound Parkway NW, Suite 300 Boca Raton, FL 33487-2742 © 2015 by Taylor & Francis Group, LLC CRC Press is an imprint of Taylor & Francis Group, an Informa business No claim to original U.S. Government works Printed on acid-free paper Version Date: 20140918 International Standard Book Number-13: 978-1-4822-5219-4 (Hardback) This book contains information obtained from authentic and highly regarded sources. Reasonable efforts have been made to publish reliable data and information, but the author and publisher cannot assume responsibility for the validity of all materials or the consequences of their use. The authors and publishers have attempted to trace the copyright holders of all material reproduced in this publication and apologize to copyright holders if permission to publish in this form has not been obtained. If any copyright material has not been acknowledged please write and let us know so we may rectify in any future reprint. Except as permitted under U.S. Copyright Law, no part of this book may be reprinted, reproduced, transmit- ted, or utilized in any form by any electronic, mechanical, or other means, now known or hereafter invented, including photocopying, microfilming, and recording, or in any information storage or retrieval system, without written permission from the publishers. For permission to photocopy or use material electronically from this work, please access www.copyright. com (http://www.copyright.com/) or contact the Copyright Clearance Center, Inc. -

Analyzing and Detecting Emerging Internet of Things Malware: a Graph-Based Approach
This is the author's version of an article that has been published in this journal. Changes were made to this version by the publisher prior to publication. The final version of record is available at http://dx.doi.org/10.1109/JIOT.2019.2925929 1 Analyzing and Detecting Emerging Internet of Things Malware: A Graph-based Approach Hisham Alasmaryzy, Aminollah Khormaliy, Afsah Anwary, Jeman Parky, Jinchun Choi{y, Ahmed Abusnainay, Amro Awady, DaeHun Nyang{, and Aziz Mohaiseny yUniversity of Central Florida zKing Khalid University {Inha University Abstract—The steady growth in the number of deployed Linux-like capabilities. In particular, Busybox is widely used Internet of Things (IoT) devices has been paralleled with an equal to achieve the desired functionality; based on a light-weighted growth in the number of malicious software (malware) targeting structure, it supports utilities needed for IoT devices. those devices. In this work, we build a detection mechanism of IoT malware utilizing Control Flow Graphs (CFGs). To motivate On the other hand, and due to common structures, the for our detection mechanism, we contrast the underlying char- Linux capabilities of the IoT systems inherit and extend the acteristics of IoT malware to other types of malware—Android potential threats to the Linux system. Executable and Linkable malware, which are also Linux-based—across multiple features. Format (ELF), a standard format for executable and object The preliminary analyses reveal that the Android malware have code, is sometimes exploited as an object of malware. The high density, strong closeness and betweenness, and a larger number of nodes. -

INFILTRATE Ghidra
Three Heads Are Better Than One: Mastering NSA's Ghidra Reverse Engineering Tool Alexei Bulazel Jeremy Blackthorne @0xAlexei @0xJeremy github.com/0xAlexei/INFILTRATE2019 Disclaimer This material is based on the publicly released Ghidra, there is no classified information in this presentation Alexei Bulazel @0xAlexei ● Senior Security Researcher at River Loop Security ● Research presentations and publications: ○ Presentations at REcon (MTL & BRX), SummerCon, DEFCON, Black Hat, etc. ○ Academic publications at USENIX WOOT and ROOTS ○ Cyber policy in Lawfare, etc. ● Collaborated with Jeremy on research at RPI, MIT Lincoln Laboratory, and Boston Cybernetics Institute ● Proud RPISEC alumnus Jeremy Blackthorne @0xJeremy ● Instructor at the Boston Cybernetics Institute ● PhD candidate at RPI focused on environmental keying ● Former researcher at MIT Lincoln Laboratory ● United States Marine Corps 2002 - 2006 ● RPISEC alumnus Outline 1. Intro 2. Interactive Exercises a. Manual Static Analysis b. Scripting Ghidra 3. P-Code & SLEIGH 4. Discussion 5. Conclusion Participating 1. Install OpenJDK 11, add its bin directory to your PATH ● jdk.java.net/11 2. Download Ghidra ● ghidra-sre.org ● github.com/NationalSecurityAgency/ghidra/releases 3. Download our demo scripts and binaries ● github.com/0xAlexei/INFILTRATE2019 Ghidra ● Java-based interactive reverse engineering tool developed by US National Security Agency - similar in functionality to IDA Pro, Binary Ninja, etc… ○ Static analysis only currently, debugger support promised to be coming soon ○ Runs on Mac, Linux, and Windows ● All credit for creating Ghidra goes to the developers at NSA ● Released open source at RSA in March 2019 ○ 1.2M+ lines of code ● NSA has not discussed the history of the tool, but comments in source files go as far back as February 1999 Outline 1. -
Android Reverse Engineering: Understanding Third-Party Applications
Android reverse engineering: understanding third-party applications Vicente Aguilera Díaz OWASP Spain Chapter Leader Co-founder of Internet Security Auditors [email protected] Twitter: @vaguileradiaz www.vicenteaguileradiaz.com OWASP EU Tour 2013 Copyright © The OWASP Foundation June 5, 2013. Bucharest (Romania) Permission is granted to copy, distribute and/or modify this document under the terms of the OWASP License. The OWASP Foundation http://www.owasp.org Who I am? VICENTE AGUILERA DÍAZ Co-founder of Internet Security Auditors OWASP Spain Chapter Leader More info: www.vicenteaguileradiaz.com OWASP 2 Agenda Reverse engineering: definition and objectives Application analysis workflow Malware identification in Android apps OWASP 3 Reverse engineering: definition and objectives Definition Refers to the process of analyzing a system to identify its components and their interrelationships, and create representations of the system in another form or a higher level of abstraction. [1] Objetives The purpose of reverse engineering is not to make changes or to replicate the system under analysis, but to understand how it was built. OWASP 4 Application analysis workflow Original APK Analyze Decompress and Rebuild Dissassemble APK Modify Scope of this presentation Modified APK OWASP 5 Application analysis workflow App Name SaveAPK Astro File Manager Real APK Leecher APK apktool radare2 unzip AndroidManifest.xml /lib apktool.yml /META-INF /assets /res /res resources.arsc AXMLPrinter2.jar Disasm /smali AndroidManifest.xml Human-readable -
![Arxiv:1611.10231V1 [Cs.CR] 30 Nov 2016 a INTRODUCTION 1](https://docslib.b-cdn.net/cover/4076/arxiv-1611-10231v1-cs-cr-30-nov-2016-a-introduction-1-1544076.webp)
Arxiv:1611.10231V1 [Cs.CR] 30 Nov 2016 a INTRODUCTION 1
00 Android Code Protection via Obfuscation Techniques: Past, Present and Future Directions Parvez Faruki, Malaviya National Institute of Technology Jaipur, India Hossein Fereidooni, University of Padua, Italy Vijay Laxmi, Malaviya National Institute of Technology Jaipur, India Mauro Conti, University of Padua, Italy Manoj Gaur, Malaviya National Institute of Technology Jaipur, India Mobile devices have become ubiquitous due to centralization of private user information, contacts, messages and multiple sensors. Google Android, an open-source mobile Operating System (OS), is currently the mar- ket leader. Android popularity has motivated the malware authors to employ set of cyber attacks leveraging code obfuscation techniques. Obfuscation is an action that modifies an application (app) code, preserving the original semantics and functionality to evade anti-malware. Code obfuscation is a contentious issue. Theoretical code analysis techniques indicate that, attaining a verifiable and secure obfuscation is impos- sible. However, obfuscation tools and techniques are popular both among malware developers (to evade anti-malware) and commercial software developers (protect intellectual rights). We conducted a survey to uncover answers to concrete and relevant questions concerning Android code obfuscation and protection techniques. The purpose of this paper is to review code obfuscation and code protection practices, and evalu- ate efficacy of existing code de-obfuscation tools. In particular, we discuss Android code obfuscation methods, custom app protection techniques, and various de-obfuscation methods. Furthermore, we review and ana- lyze the obfuscation techniques used by malware authors to evade analysis efforts. We believe that, there is a need to investigate efficiency of the defense techniques used for code protection. This survey would be beneficial to the researchers and practitioners, to understand obfuscation and de-obfuscation techniques to propose novel solutions on Android. -

Challenges in Firmware Re-Hosting, Emulation, and Analysis
Challenges in Firmware Re-Hosting, Emulation, and Analysis CHRISTOPHER WRIGHT, Purdue University WILLIAM A. MOEGLEIN, Sandia National Laboratories SAURABH BAGCHI, Purdue University MILIND KULKARNI, Purdue University ABRAHAM A. CLEMENTS, Sandia National Laboratories System emulation and firmware re-hosting have become popular techniques to answer various security and performance related questions, such as, does a firmware contain security vulnerabilities or meet timing requirements when run on a specific hardware platform. While this motivation for emulation and binary analysis has previously been explored and reported, starting to either work or research in the field is difficult. To this end, we provide a comprehensive guide for the practitioner or system emulation researcher. We layout common challenges faced during firmware re-hosting, explaining successive steps and surveying common tools used to overcome these challenges. We provide classification techniques on five different axes, including emulator methods, system type, fidelity, emulator purpose, and control. These classifications and comparison criteria enable the practitioner to determine the appropriate tool for emulation. We use our classifications to categorize popular works in the field and present 28 common challenges faced when creating, emulating and analyzing a system, from obtaining firmwares to post emulation analysis. CCS Concepts: • Computer systems organization → Embedded and cyber-physical systems; Firmware; Embedded hardware; Embedded software; Real-time systems; • Hardware → Simulation and emulation. Additional Key Words and Phrases: Firmware re-hosting, system emulation, embedded systems, emulation fidelity, emulator classification, binary analysis, reverse engineering, emulation challenges ACM Reference Format: Christopher Wright, William A. Moeglein, Saurabh Bagchi, Milind Kulkarni, and Abraham A. Clements. 2020. Challenges in Firmware Re-Hosting, Emulation, and Analysis. -

Windows Malware Analysis & Static Analysis Blocking CYS5120 - Malware Analysis Bahcesehir University Cyber Security Msc Program
Code Analysis Analyzing Malicious Windows Programs Static Analysis Blocking Methods 04 - Code Analysis & Windows Malware Analysis & Static Analysis Blocking CYS5120 - Malware Analysis Bahcesehir University Cyber Security Msc Program Dr. Ferhat Ozgur Catak 1 Mehmet Can Doslu 2 [email protected] [email protected] 2017-2018 Fall Dr. Ferhat Ozgur Catak & Mehmet Can Doslu 04 - Code Analysis & Windows Malware Analysis & Static Analysis Blocking Code Analysis Analyzing Malicious Windows Programs Static Analysis Blocking Methods Table of Contents 1 Code Analysis Packers & Unpacking Stack Operations Packer Anatomy Disassembler & Debugger Identifying Packed Programs IDA Pro Automated Unpacking The IDA Pro Interface Manual Unpacking Useful Windows for Analysis Anti-disassembly Lab Jump Instructions with the 2 Analyzing Malicious Windows Same Target Programs A Jump Instruction with a Introduction Constant Condition The Windows API Impossible Disassembly File System Functions The Function Pointer Problem Special Files Return Pointer Abuse The Windows Registry Misusing Structured Exception Networking APIs Handlers Lab Thwarting Stack-Frame 3 Static Analysis Blocking Methods Analysis Dr. Ferhat Ozgur Catak & Mehmet Can Doslu 04 - Code Analysis & Windows Malware Analysis & Static Analysis Blocking Code Analysis Analyzing Malicious Windows Programs Static Analysis Blocking Methods Table of Contents 1 Code Analysis Packers & Unpacking Stack Operations Packer Anatomy Disassembler & Debugger Identifying Packed Programs IDA Pro Automated Unpacking The IDA Pro Interface Manual Unpacking Useful Windows for Analysis Anti-disassembly Lab Jump Instructions with the 2 Analyzing Malicious Windows Same Target Programs A Jump Instruction with a Introduction Constant Condition The Windows API Impossible Disassembly File System Functions The Function Pointer Problem Special Files Return Pointer Abuse The Windows Registry Misusing Structured Exception Networking APIs Handlers Lab Thwarting Stack-Frame 3 Static Analysis Blocking Methods Analysis Dr. -

Ghidra Vs Radare2
Ghidra Vs Radare2 Radare2 – is a framework built for reverse engineering and analyzing binaries. js File size differs 2462470 vs 2461765 Buffer truncated to 2461765 byte(s) (705 not compared) 86611 So… the WebAssembly is essentially generating JavaScript on-the-fly. With the addition, the latest UFC 257 lineup includes: Conor McGregor vs. Plugin manager for x64dbg. radare2 tools. Я открываю программу в Cutter — GUI для radare2 со встроенным декомпилятором ghidra, имеющим возможность эмуляции, а с недавних пор и отладки. Plugin manager for x64dbg. 7 місяців тому. Watch the UFC 257 "McGregor vs. With radare2 you can analyze, disassemble. The podcast is published every weekday and designed to get you ready for the day with a brief, usually 5 minute long, summary of current network security related events. radare2 was added by Tim_B in Sep 2016 and the latest update was made in Apr 2018. Free and Open Source RE Platform powered by Rizin. Ve srovnání s komerčním IDA je pomalejší a má víc chyb. Even if you know how to disassemble a Brown iron, this will not help. IDA Pro is a programmable, interactive, and multi-processor disassembler combined with a local and remote debugger and augmented by a complete plugin programming environment. 0 has been released!. We are using radare2 together with avr-gdb and simavr to reverse engineer the challenge "Jumpy" which implemets a password checking algorithm В видео речь пойдет про Ida Pro (free) x64dbg (плагины snowmen, x64dbg2ghidra) Ghidra Radare2 Затрону поверхностно windbg, binary ninja. pdf - Free ebook download as PDF File (. Patching Binaries (with vim, Binary Ninja, Ghidra and radare2) - bin 0x2F. -

MISP Objects
MISP Objects MISP Objects Introduction. 7 Funding and Support . 9 MISP objects. 10 ail-leak . 10 ais-info . 11 android-app. 12 android-permission. 13 annotation . 15 anonymisation . 16 asn . 20 attack-pattern . 22 authentication-failure-report . 22 authenticode-signerinfo . 23 av-signature. 24 bank-account. 25 bgp-hijack. 29 bgp-ranking . 30 blog . 30 boleto . 32 btc-transaction . 33 btc-wallet . 34 cap-alert . 35 cap-info. 39 cap-resource . 43 coin-address . 44 command . 46 command-line. 46 cookie . 47 cortex . 48 cortex-taxonomy . 49 course-of-action . 49 covid19-csse-daily-report . 51 covid19-dxy-live-city . 53 covid19-dxy-live-province . 54 cowrie . 55 cpe-asset . 57 1 credential . 67 credit-card . 69 crypto-material. 70 cytomic-orion-file. 73 cytomic-orion-machine . 74 dark-pattern-item. 74 ddos . 75 device . 76 diameter-attack . 77 dkim . 79 dns-record . ..