Linear Synchronous Motors for MAGLEV, US DOT, FRA, NMI, Richard D Thorton, 1993 -11-Advanced’ Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Metro Rail Design Criteria Section 10 Operations
METRO RAIL DESIGN CRITERIA SECTION 10 OPERATIONS METRO RAIL DESIGN CRITERIA SECTION 10 / OPERATIONS TABLE OF CONTENTS 10.1 INTRODUCTION 1 10.2 DEFINITIONS 1 10.3 OPERATIONS AND MAINTENANCE PLAN 5 Metro Baseline 10- i Re-baseline: 06/15/10 METRO RAIL DESIGN CRITERIA SECTION 10 / OPERATIONS OPERATIONS 10.1 INTRODUCTION Transit Operations include such activities as scheduling, crew rostering, running and supervision of revenue trains and vehicles, fare collection, system security and system maintenance. This section describes the basic system wide operating and maintenance philosophies and methodologies set forth for the Metro Rail Projects, which shall be used by designer in preparation of an Operations and Maintenance Plan. An initial Operations and Maintenance Plan (OMP) is developed during the environmental phase and is based on ridership forecasts produced during this early planning phase of a project. From this initial Operations and Maintenance plan, headways are established that are to be evaluated by a rail operations simulation upon which design and operating headways can be established to confirm operational goals for light and heavy rail systems. The Operations and Maintenance Plan shall be developed in order to design effective, efficient and responsive transit system. The operations criteria and requirements established herein represent Metro’s Rail Operating Requirements / Criteria applicable to all rail projects and form the basis for the project-specific operational design decisions. They shall be utilized by designer during preparation of Operations and Maintenance Plan. Any proposed deviation to Design Criteria cited herein shall be approved by Metro, as represented by the Change Control Board, consisting of management responsible for project construction, engineering and management, as well as daily rail operations, planning, systems and vehicle maintenance with appropriate technical expertise and understanding. -

By James Powell and Gordon Danby
by James Powell and Gordon Danby aglev is a completely new mode of physically contact the guideway, do not need The inventors of transport that will join the ship, the engines, and do not burn fuel. Instead, they are the world's first wheel, and the airplane as a mainstay magnetically propelled by electric power fed superconducting Min moving people and goods throughout the to coils located on the guideway. world. Maglev has unique advantages over Why is Maglev important? There are four maglev system tell these earlier modes of transport and will radi- basic reasons. how magnetic cally transform society and the world economy First, Maglev is a much better way to move levitation can in the 21st Century. Compared to ships and people and freight than by existing modes. It is wheeled vehicles—autos, trucks, and trains- cheaper, faster, not congested, and has a much revolutionize world it moves passengers and freight at much high- longer service life. A Maglev guideway can transportation, and er speed and lower cost, using less energy. transport tens of thousands of passengers per even carry payloads Compared to airplanes, which travel at similar day along with thousands of piggyback trucks into space. speeds, Maglev moves passengers and freight and automobiles. Maglev operating costs will at much lower cost, and in much greater vol- be only 3 cents per passenger mile and 7 cents ume. In addition to its enormous impact on per ton mile, compared to 15 cents per pas- transport, Maglev will allow millions of human senger mile for airplanes, and 30 cents per ton beings to travel into space, and can move vast mile for intercity trucks. -
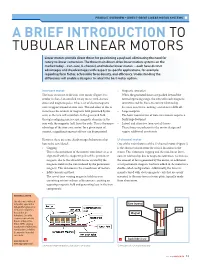
A BRIEF INTRODUCTION to TUBULAR LINEAR MOTORS Linear Motors Provide Direct Thrust for Positioning a Payload, Eliminating the Need for Rotary-To-Linear Conversion
PRODUCT OVERVIEW – DIRECT-DRIVE LINEAR MOTOR SYSTEMS A BRIEF INTRODUCTION TO TUBULAR LINEAR MOTORS Linear motors provide direct thrust for positioning a payload, eliminating the need for rotary-to-linear conversion. The three main direct-drive linear motion systems on the market today – iron-core, U-channel, and tubular linear motors – each have distinct advantages and disadvantages with respect to specific applications, for example regarding form factor, achievable force density, and efficiency. Understanding the differences will enable a designer to select the best motor option. Iron-core motor • Magnetic saturation The basic structure of the iron-core motor (Figure 1) is When the generated forces are pushed beyond the similar to that of an unrolled rotary motor with discrete normal operating range, the iron will reach magnetic stator and magnetic poles. It has a set of electromagnetic saturation and the force-to-current relationship coils wrapped around an iron core. The end effect of this is becomes non-linear, making control more difficult. to increase the amount of magnetic field generated by the • Large footprint coils, as the iron will contribute to the generated field The basic construction of iron-core motors requires a through realigning microscopic magnetic domains in the fairly large footprint. iron with the magnetic field from the coils. This is the major • Lateral and attractive (non-useful) forces advantage of the iron-core motor: for a given input of These forces are inherent to the motor design and current, a significant amount of force can be generated. require additional constraints. However, there are some disadvantages/behaviours that U-channel motor have to be considered: One of the main features of the U-channel motor (Figure 2) • Cogging is the absence of iron from the critical locations in the This is the movement of the motor’s iron forcer so as to motor. -

High Speed Linear Induction Motor Efficiency Optimization
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 2005-06 High speed linear induction motor efficiency optimization Johnson, Andrew P. (Andrew Peter) http://hdl.handle.net/10945/11052 High Speed Linear Induction Motor Efficiency Optimization by Andrew P. Johnson B.S. Electrical Engineering SUNY Buffalo, 1994 Submitted to the Department of Ocean Engineering and the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degree of Naval Engineer and Master of Science in Electrical Engineering and Computer Science at the Massachusetts Institute of Technology June 2005 ©Andrew P. Johnson, all rights reserved. MIT hereby grants the U.S. Government permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part. Signature of A uthor ................ ............................... D.epartment of Ocean Engineering May 7, 2005 Certified by. ..... ........James .... ... ....... ... L. Kirtley, Jr. Professor of Electrical Engineering // Thesis Supervisor Certified by......................•........... ...... ........................S•:• Timothy J. McCoy ssoci t Professor of Naval Construction and Engineering Thesis Reader Accepted by ................................................. Michael S. Triantafyllou /,--...- Chai -ommittee on Graduate Students - Depa fnO' cean Engineering Accepted by . .......... .... .....-............ .............. Arthur C. Smith Chairman, Committee on Graduate Students DISTRIBUTION -

Industrial Linear Motors
Industrial Linear Motors Smart solutions are driven by PRODUCT OVERVIEW www.linmot.com Precision and dynamics In the products and in the everyday life of NTI AG, these values are inseparable. NTI AG NTI AG is a global manufacturer of high quality tubular style linear motors and linear motor systems and thus focuses on the development, production and distribution of linear direct drives for use in industrial environments. Founded in 1993 as an independent business unit of the Sulzer Group, NTI AG has been in operation since 2000 as an independent company. NTI AG headquarters are located in Spreitenbach, near Zurich in Switzerland. In addition to three production sites in Switzerland and Slovakia, NTI AG maintains a sales and support office LinMot® USA Inc. to cover the Americas. Mission The brands LinMot® for industrial linear motors and MagSpring® for magnetic springs are offered LinMot offers its customers a sophisticated and dedicated linear to customers worldwide. NTI AG drive system that can be easily integrated into all leading control maintains an experienced customer systems. A high degree of standardization, delivery from stock and consultant sales and support a worldwide distribution network insure the immediate availability network of over 80 locations and excellent customer support. worldwide. For the realization of linear motion Our aim is to push linear direct drive technology and make it a NTI AG is always a competent and standard machine design element. We offer highly efficient drive reliable partner. solutions that make a major contribution to the overall resource conservation effort. 2 3 Linear Motors Position and Temperature sensors Electronic nameplate Stator Winding Slider with Neodynium Magnets Payload Mounting LinMot linear motors employ a direct electromagnetic principle. -

Methods for Improving Efficiency of Linear Induction Motor for Urban
512 Methods for Improving Efficiency of Linear Induction Motor for Urban Transit∗ Nobuo FUJII∗∗, Toshiyuki HOSHI∗∗ and Yuichi TANABE∗∗ To improve the efficiency of the linear induction motors (LIMs) for transportation, the compensation of end effect for LIM with the restriction of length and the long LIM with small end effect essentially are discussed respectively. Based on the proposed concept, the com- pensation method of the magnet rotator type and AC coil type of compensators are developed respectively. The utility is not yet confirmed. As for the long LIM with length of 10 m, the analysis shows that the efficiencies are about 85% at 40 km/h and above 90% at 360 km/h respectively. Key Words: Linear Motor, Linear Induction Motor, LIM, Linear Drives, Transportation, Traction, Subway, Electromagnetic Analysis, End Effect, Compensator length of LIM, the compensation of end effect is the only 1. Introduction method for remarkable improve of the characteristics. The In a part of new type transit, linear induction motors compensating winding method was proposed previous- (1) ff (LIMs) have been used as a direct electromagnetic drive ly , but it was not e ective. The authors have proposed ff (2) device without adhesion. In Japan, the LIM-driven train the new type of end e ect compensator . The proposed ff has been used in the subway in some large cities, as the method is based on the new concept that the end e ect can LIM reduces the construction cost of tunnel because the be compensated only by supplying the eddy current syn- thin shape makes the sectional area of tunnel small and the chronizing with the LIM frequency in front of LIM, which large gradability enables the minimum length of the route. -

Headway and Speed Data Acquisition Using Video
TRANSPORTATION RESEARCH RECORD 1225 Headway and Speed Data Acquisition Using Video M. A. P. TayroR, W. YouNc, eNp R. G. THonlpsoN Accurate knowledge of vehicle speeds headways and on trallÌc ment (such as a freeway) before this study, so there was an networks is a fundamental part of transport systems modelling. excellent opportunity to evaluate the system and suggest mod- Video and recently developed automatic data-extraction tecñ- ifications to it. This equipment also made niques have the potential to provide a cheap, quick, easy, and it feasible to inves- accurate method of investigating traflic systems. This paper pre- tigate the relationship between vehicle speeds and location in sents two studies that use video-based equipment to investigate the car parks. character of vehicle speeds and headways. Investigation oÌ head- rvays on freeway traffic allows the potential of this technology in a high-speed environment to be determined. Its application to the THE VIDEO SYSTEM study ofspeeds in parking lots enabled its usefulneis in low-speed environments to be studied. The data obtained from the video was Using film equipment compared to traditional methods of collecting headway and speed to obtain a permanent record of vehicle data. movements is not a new concept. However, considerable recent developments have occurred in collecting data using video. Digital image-processing applications offer the potential to In particular, ARRB has developed a trailer-mounted video automate a large number of traffic surveys. It is, therefore, recording system (3). This relatively new equipment has until not surprising that considerable interest has been directed at recently experienced only a limited range of applications. -

Headway Adherence. Detection and Reduction of the Bus Bunching Effect
HEADWAY ADHERENCE. DETECTION AND REDUCTION OF THE BUS BUNCHING EFFECT Josep Mension Camps Director Central Services and Deputy Chief Officer of Bus Network. Transports Metropolitans de Barcelona (TMB). Miquel Estrada Romeu Associate Professor. Universitat Politècnica de Catalunya- BarcelonaTECH. 1. INTRODUCTION Transit systems should provide a good performance to compete against the wide usage of cars in metropolitan areas. The level of service of these systems relies on a proper temporal and spatial coverage provision (high frequencies, low stop spacings) as well as significant regularity and comfort. In this way, bus systems in densely populated cities usually operate at short headways (10 minutes or less). However, in these busy routes, any delay suffered by a single bus is propagated to the whole bus fleet. This fact causes vehicle bunching and unstable time-headways. In real bus lines, we usually see that two or more vehicles arrive together or in close succession, followed by a long gap between them. There are many sources of potential external disruptions in the service of one bus: illegal parking in the bus lane, failure in the doors opening system, traffic jams, etc. However, some intrinsic characteristics of transit systems and traffic management may also induce delays at specific vehicles such as traffic signal coordination and irregular passenger arrivals at stops. These facts make the bus motion unstable. Therefore, bus bunching is a common problem in the real operation of buses all over the world that must be addressed. The crucial issue is that bus bunching has a great impact on both users and agency cost. From a passenger perspective, the bus bunching phenomena increases the travel time of passengers (riding and waiting time) and worsens the vehicle occupancy. -

Single-Phase Line Start Permanent Magnet Synchronous Motor with Skewed Stator*
POWER ELECTRONICS AND DRIVES Vol. 1(36), No. 2, 2016 DOI: 10.5277/PED160212 SINGLE-PHASE LINE START PERMANENT MAGNET SYNCHRONOUS MOTOR WITH SKEWED STATOR* MACIEJ GWOŹDZIEWICZ, JAN ZAWILAK Wrocław University of Science and Technology, Wybrzeże Stanisława Wyspiańskiego 27, 50-370 Wrocław, Poland, e-mail: [email protected], [email protected] Abstract: The article deals with single-phase line start permanent magnet synchronous motor with skewed stator. Constructions of two physical motor models are presented. Results of the motors run- ning properties are analysed. Keywords: single-phase motor, permanent magnet, skew, vibration 1. INTRODUCTION Single-phase induction motors almost always have skewed rotors. It is a simple and effective solution in limitation of the motor vibration, noise and torque pulsation. In the case of line start permanent magnet synchronous motors skewed rotor is ex- tremely difficult to manufacture due to interior permanent magnets. Skewed stator is less complicated in comparison with skewed rotor [3], [4], [7], [8]. During many tests of single-phase line start permanent magnet synchronous motor physical models The authors noticed that vibration is one of the main drawbacks of these motors [1], [2]. It prompted them to construct and build a single-phase line start permanent magnet motor with skewed stator. 2. MOTOR CONSTRUCTION Two dimensional field-circuit models of the single-phase line start permanent magnet synchronous motor were applied in Maxwell software. The models are based on the mass production single-phase induction motor Seh 80-2B type: rated power Pn = 1.1 kW, rated voltage Un = 230 V, rated frequency fn = 50 Hz, number of pole * Manuscript received: September 7, 2016; accepted: December 7, 2016. -

Making Headway, Capital Investments to Keep Transit Moving
CAPITAL INVESTMENT PLAN Making Headway Capital Investments to Keep Transit Moving 2019–2033 headway (/ˈhed wā/) noun 1. forward movement or progress, especially when the way is difficult. 2. the average interval between trains, streetcars, or buses. The shorter the headway, the more passengers carried per hour. Making Headway — Capital Investments to Keep Transit Moving January 2019 From the Chief Executive Officer In January 2018, the TTC published a new Corporate Plan that clearly laid out our priorities for the next five years. At the top of the list was transforming for financial sustainability. “Fiscal sustainability,” we said, “depends on our ability to fund what the TTC is being asked to deliver over the long term.” We committed to providing better budget information for improved long-term decision-making. Over the past 12 months, we have undertaken a massive, multi-department review of all of our assets. The result is this Capital Investment Plan. Toronto’s transit system is hailed as among the most multi- modal systems in the world, with seamless integration between buses, streetcars, Wheel-Trans and the subway. The TTC’s interdependent network of fleet, track, power, maintenance and other infrastructure moves more than half a billion people annually. Funding for critical maintenance and system improvements is necessary. Projects that have been approved are still awaiting funding. Line 2 Capacity Enhancement is unfunded. Buses past 2021 are unfunded. The expansion of Bloor-Yonge Station, which is needed to accommodate ridership growth even before planned transit expansion, is unfunded. The TTC Way, which was introduced in our Corporate Plan, establishes clear guidelines for how we at the TTC work with each other, with customers and with our partners, including our funding partners. -

Flywheel Energy Storage System with Superconducting Magnetic Bearing
Flywheel Energy Storage System with Superconducting Magnetic Bearing Makoto Hirose * , Akio Yoshida , Hidetoshi Nasu , Tatsumi Maeda Shikoku Research Institute Incorporated , Takamatsu , Kagawa , Japan In an effort to level electricity demand between day and night, we have carried out research activities on a high-temperature superconducting flywheel energy storage system (an SFES) that can regulate rotary energy stored in the flywheel in a noncontact, low-loss condition using superconductor assemblies for a magnetic bearing. These studies are being conducted under a Japanese national project (sponsored by the Agency of Industrial Science and Technology - a unit of the Ministry of International Trade and Industry - and the New Energy and Industrial Technology Development Organization). Phase 1 of the project was carried out on a five-year plan beginning in fiscal 1995 with the participation of 10 interested companies, including Shikoku Research Institute Inc. During the five-year period, we carried out two major studies - one on the operation of a small flywheel system (built as a small-scale model) and the other on superconducting magnetic bearings as an elemental technology for a 10-kWh energy storage system. Of the results achieved in Phase 1 of the project (from October 1995 through March 2000), this paper gives an outline of the small flywheel system (having an energy storage capacity of 0.5 kWh) and reports on progress in the development of magnetic bearings using superconductor assemblies (which we call "superconducting magnetic bearings" or "SMBs"). 1. Small-Scale Model 1.1. System Configuration The small-scale model was built in 1998 mainly for the purpose of demonstrating a control technology for high-speed operation of a rotor levitated in a noncontact condition by a superconducting magnetic bearing. -

Review of Magnetic Levitation (MAGLEV): a Technology to Propel Vehicles with Magnets by Monika Yadav, Nivritti Mehta, Aman Gupta, Akshay Chaudhary & D
Global Journal of Researches in Engineering Mechanical & Mechanics Volume 13 Issue 7 Version 1.0 Year 2013 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online ISSN: 2249-4596 & Print ISSN: 0975-5861 Review of Magnetic Levitation (MAGLEV): A Technology to Propel Vehicles with Magnets By Monika Yadav, Nivritti Mehta, Aman Gupta, Akshay Chaudhary & D. V. Mahindru SRMGPC, India Abstract - The term “Levitation” refers to a class of technologies that uses magnetic levitation to propel vehicles with magnets rather than with wheels, axles and bearings. Maglev (derived from magnetic levitation) uses magnetic levitation to propel vehicles. With maglev, a vehicle is levitated a short distance away from a “guide way” using magnets to create both lift and thrust. High-speed maglev trains promise dramatic improvements for human travel widespread adoption occurs. Maglev trains move more smoothly and somewhat more quietly than wheeled mass transit systems. Their nonreliance on friction means that acceleration and deceleration can surpass that of wheeled transports, and they are unaffected by weather. The power needed for levitation is typically not a large percentage of the overall energy consumption. Most of the power is used to overcome air resistance (drag). Although conventional wheeled transportation can go very fast, maglev allows routine use of higher top speeds than conventional rail, and this type holds the speed record for rail transportation. Vacuum tube train systems might hypothetically allow maglev trains to attain speeds in a different order of magnitude, but no such tracks have ever been built. Compared to conventional wheeled trains, differences in construction affect the economics of maglev trains.