Robotic Origami Folding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Simple Origami for Cub Scouts and Leaders
SIMPLE ORIGAMI FOR CUB SCOUTS AND LEADERS Sakiko Wehrman (408) 296-6376 [email protected] ORIGAMI means paper folding. Although it is best known by this Japanese name, the art of paper folding is found all over Asia. It is generally believed to have originated in China, where paper- making methods were first developed two thousand years ago. All you need is paper (and scissors, sometimes). You can use any kind of paper. Traditional origami patterns use square paper but there are some patterns using rectangular paper, paper strips, or even circle shaped paper. Typing paper works well for all these projects. Also try newspaper, gift-wrap paper, or magazine pages. You may even want to draw a design on the paper before folding it. If you want to buy origami paper, it is available at craft stores and stationary stores (or pick it up at Japan Town or China Town when you go there on a field trip). Teach the boys how to make a square piece from a rectangular sheet. Then they will soon figure out they can keep going, making smaller and smaller squares. Then they will be making small folded trees or cups! Standard origami paper sold at a store is 15cm x 15 cm (6”x6”) but they come as small as 4cm (1.5”) and as large as 24cm (almost 9.5”). They come in different colors either single sided or double sided. They also come in different patterns, varying from traditional Japanese patterns to sparkles. When you make an origami, take your time. -

Geometry of Transformable Metamaterials Inspired by Modular Origami
Geometry of Transformable Metamaterials Inspired by Yunfang Yang Department of Engineering Science, Modular Origami University of Oxford Magdalen College, Oxford OX1 4AU, UK Modular origami is a type of origami where multiple pieces of paper are folded into mod- e-mail: [email protected] ules, and these modules are then interlocked with each other forming an assembly. Some 1 of them turn out to be capable of large-scale shape transformation, making them ideal to Zhong You create metamaterials with tuned mechanical properties. In this paper, we carry out a fun- Department of Engineering Science, damental research on two-dimensional (2D) transformable assemblies inspired by modu- Downloaded from http://asmedigitalcollection.asme.org/mechanismsrobotics/article-pdf/10/2/021001/6404042/jmr_010_02_021001.pdf by guest on 25 September 2021 University of Oxford, lar origami. Using mathematical tiling and patterns and mechanism analysis, we are Parks Road, able to develop various structures consisting of interconnected quadrilateral modules. Oxford OX1 3PJ, UK Due to the existence of 4R linkages within the assemblies, they become transformable, e-mail: [email protected] and can be compactly packaged. Moreover, by the introduction of paired modules, we are able to adjust the expansion ratio of the pattern. Moreover, we also show that trans- formable patterns with higher mobility exist for other polygonal modules. The design flex- ibility among these structures makes them ideal to be used for creation of truly programmable metamaterials. [DOI: 10.1115/1.4038969] Introduction be made responsive to external loading conditions. These struc- tures and materials based on such structures can find their usage Recently, there has been a surge of interest in creating mechani- in automotive, aerospace structures, and body armors. -

Guide to Book Manufacturing Building Relationships for a Quality Experience
GUIDE TO BOOK MANUFACTURING BUILDING RELATIONSHIPS FOR A QUALITY EXPERIENCE Thomson Reuters, Guide to Book Manufacturing is a reference book intended for Thomson Reuters Core Publishing Solutions customers to give them a better understanding of the processes involved in creating, shipping, warehousing and distributing millions of books, pamphlets and newsletters produced annually. Project Lead Greg Groenjes Graphic Design Kelly Finco Vickie Jensen Janine Maxwell Contributing Writers Kelly Aune, Lori Clancy, Greg Groenjes, Brian Grunklee, Bob Holthe, Val Howard, Christine Hunter, Vickie Jensen, Sandi Krell, Linda Larson, Jerry Leyde, Kris Lundblad, Janine Maxwell, Walt Niemiec, John Reandeau, Nancy Roth, Jody Schmidt, Alex Siebenaler, Estelle Vruno Contributing Editor Christine Hunter Copy Editor Anne Kelley Conklin © 2018 Thomson Reuters. All rights reserved. July edition. TABLE OF CONTENTS Thomson Reuters Press Core Publishing Solutions Overview • Printing Background 7-1 • Thomson Reuters CPS 1-2 • Offset Presses 7-2 • Single-Color Web Press 7-2 Manufacturing Client Services • Web Press Components 7-3 (Planning & Scheduling) • Multi-Color Sheet-Fed Presses 7-6 • Service and Support 2-1 • Sheet-fed Press Description 7-6 • Roles and Responsibilities 2-2 • Sheet-fed Press Components 7-7 • Job Planning Process 2-3 • Color Printing 7-8 • Teamwork Is the Key to Success 2-5 • Colored Ink 7-8 • Considerations (Sheet-fed vs. Web) 7-9 Material Sourcing • Thomson Reuters Web Press Specifications 7-10 (Purchasing & Receiving) • Purchasing 3-1 Bindery -
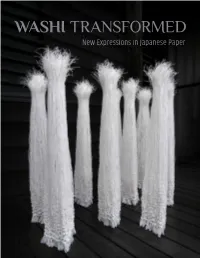
WASHI TRANSFORMED New Expressions in Japanese Paper 2 WASHI TRANSFORMED INTRODUCTION
WASHI TRANSFORMED New Expressions in Japanese Paper 2 WASHI TRANSFORMED INTRODUCTION nique for its strong natural fibers and its Despite the increased mechanization of papermaking U painstaking production techniques, which in Japan over the last century, contemporary Japanese have been passed down from one generation to artists have turned to this supple yet sturdy paper the next, washi stands out as a nexus of tradition to express their artistic visions. The thirty-seven and innovation. Its continuing, and ever-evolving, artworks and installations in Washi Transformed: importance as an artistic medium is due primarily to New Expressions in Japanese Paper epitomize the the ingenuity of Japanese contemporary artists, who potential of this traditional medium in the hands of have pushed washi beyond its historic uses to create these innovative artists, who have made washi their highly textured two-dimensional works, expressive own. Using a range of techniques—layering, weaving, sculptures, and dramatic installations. Washi, which and dyeing to shredding, folding, and cutting—nine translates to “Japanese paper,” has been integral to artists embrace the seemingly infinite possibilities of Japanese culture for over a thousand years, and the washi. Bringing their own idiosyncratic techniques to strength, translucency, and malleability of this one- the material, their extraordinary creations—abstract of-a-kind paper have made it extraordinarily versatile paper sculptures, lyrical folding screens, highly as well as ubiquitous. Historically, washi has been textured wall pieces, and other dramatic installations— used as a base for Japanese calligraphy, painting, demonstrate the resilience and versatility of washi as and printmaking; but when oiled, lacquered, or a medium, as well as the unique stature this ancient otherwise altered, it has other fascinating applications art form has earned in the realm of international in architecture, religious ritual, fashion, and art. -

Jitterbug ★★★✩✩ Use 12 Squares Finished Model Ratio 1.0
Jitterbug ★★★✩✩ Use 12 squares Finished model ratio 1.0 uckminister Fuller gave the name Jitterbug to this transformation. I first came across B the Jitterbug in Amy C. Edmondson’s A Fuller Explanation (1987).As I didn’t have dowels and four-way rubber connectors, I made several cuboctahedra that worked as Jitterbugs but were not very reversible. Some were from paper and others from drinking straws and elastic thread. My first unit,Triangle Unit, was partly successful as a Jitterbug.A better result came from using three units per triangular face (or one unit per vertex) which was published in 2000. This improved version is slightly harder to assemble but has a stronger lock.The sequence is pleasingly rhythmical and all steps have location points.The pleats in step 18 form the spring that make the model return to its cuboctahedral shape. Module ★★★ Make two folds in half. Do Fold the sides to the centre. Fold the bottom half behind. 1 not crease the middle for 2 Unfold the right flap. 3 the vertical fold. Fold the top right corner to This creates a 60 degree Fold the right edge to the 4 lie on the left edge whilst the 5 angle. Unfold. 6 centre. fold starts from the original centre of the square. Reproduced with permission from Tarquin Group publication Action Modular Origami (ISBN 978-1-911093-94-7) 978-1-911093-95-4 (ebook). © 2018 Tung Ken Lam. All rights reserved. 90 ° Fold the bottom half Repeat step 4 and unfold, Fold the left edge to the 7 behind. -

Origami-Inspired Approaches for Biomedical Applications
University of Massachusetts Medical School eScholarship@UMMS Open Access Publications by UMMS Authors 2020-12-27 Origami-Inspired Approaches for Biomedical Applications Abdor Rahman Ahmed Rutgers University Et al. Let us know how access to this document benefits ou.y Follow this and additional works at: https://escholarship.umassmed.edu/oapubs Part of the Analytical, Diagnostic and Therapeutic Techniques and Equipment Commons, Biomedical Devices and Instrumentation Commons, Biotechnology Commons, Chemistry Commons, Molecular, Cellular, and Tissue Engineering Commons, and the Surgery Commons Repository Citation Ahmed AR, Gauntlett OC, Camci-Unal G. (2020). Origami-Inspired Approaches for Biomedical Applications. Open Access Publications by UMMS Authors. https://doi.org/10.1021/acsomega.0c05275. Retrieved from https://escholarship.umassmed.edu/oapubs/4484 Creative Commons License This work is licensed under a Creative Commons Attribution-Noncommercial-No Derivative Works 4.0 License. This material is brought to you by eScholarship@UMMS. It has been accepted for inclusion in Open Access Publications by UMMS Authors by an authorized administrator of eScholarship@UMMS. For more information, please contact [email protected]. This is an open access article published under a Creative Commons Non-Commercial No Derivative Works (CC-BY-NC-ND) Attribution License, which permits copying and redistribution of the article, and creation of adaptations, all for non-commercial purposes. http://pubs.acs.org/journal/acsodf Mini-Review Origami-Inspired Approaches for Biomedical Applications Abdor Rahman Ahmed, Olivia C. Gauntlett, and Gulden Camci-Unal* Cite This: ACS Omega 2021, 6, 46−54 Read Online ACCESS Metrics & More Article Recommendations ABSTRACT: Modern day biomedical applications require pro- gressions that combine advanced technology with the conform- ability of naturally occurring, complex biosystems. -

Printing History News 20
Printingprinting History history news 20 News 1 The Newsletter of the National Printing Heritage Trust, Printing Historical Society and Friends of St Bride Library Number 20 Autumn 2008 ST BRIDE EVENTS booking form, or for more information, please contact: Antiquarian Book- Glasgow 501: out of print, lecture, sellers Association, Sackville House, w1j 0dr Tuesday 21 October, Bridewell Hall, 40 Piccadilly, London . Tel: 7:00 p.m. Steve Rigley and Edwin Pick- 020 7439 3118. Fax: 020 7439 3119. stone will be talking about some of the Email: [email protected]. Wesbite: extraordinary letterpress work to have www.aba.org.uk. emerged from the University of Glas- gow’s research unit entitled ‘Out of Advance notice. The twenty-sixth Print print’ in the context of a year of cele- Networks Conference for the British brations of 500 years of printing in Book Trade Seminar will be held Scotland (see also page 2 below). between Tuesday 28 and Thursday 30 July 2009 at Trinity Hall, Cambridge. Letterpress: a celebration, one-day Further details will appear in a forth- conference, Friday 7 November, 9:30 coming issue of PHN. a.m.–5:00 p.m. There will be a packed Detail of a woodcut by Ian Mortimer, programme of talks, demonstrations I.M. Imprimit and displays of work from those keen Designer Bookbinders to share their infectious enthusiasm for Book trade conferences events letterpress in the twenty-first century. Come and join in the debates that are Books for sale: the advertising and Unless otherwise noted, the following sure to emerge. Speakers: Phil Abel promotion of print from the fifteenth events will be held at the Art Workers (Hand & Eye Letterpress), Claire century. -

The Geometry Junkyard: Origami
Table of Contents Table of Contents 1 Origami 2 Origami The Japanese art of paper folding is obviously geometrical in nature. Some origami masters have looked at constructing geometric figures such as regular polyhedra from paper. In the other direction, some people have begun using computers to help fold more traditional origami designs. This idea works best for tree-like structures, which can be formed by laying out the tree onto a paper square so that the vertices are well separated from each other, allowing room to fold up the remaining paper away from the tree. Bern and Hayes (SODA 1996) asked, given a pattern of creases on a square piece of paper, whether one can find a way of folding the paper along those creases to form a flat origami shape; they showed this to be NP-complete. Related theoretical questions include how many different ways a given pattern of creases can be folded, whether folding a flat polygon from a square always decreases the perimeter, and whether it is always possible to fold a square piece of paper so that it forms (a small copy of) a given flat polygon. Krystyna Burczyk's Origami Gallery - regular polyhedra. The business card Menger sponge project. Jeannine Mosely wants to build a fractal cube out of 66048 business cards. The MIT Origami Club has already made a smaller version of the same shape. Cardahedra. Business card polyhedral origami. Cranes, planes, and cuckoo clocks. Announcement for a talk on mathematical origami by Robert Lang. Crumpling paper: states of an inextensible sheet. Cut-the-knot logo. -
Support and Administration Behind the Scenes
CHAPTER 4 Support and Administration Behind the Scenes 126 eeping a vast industrial shop like GPO conformity to published standards, made ink, press humming around the clock throughout rollers, and adhesives, and performed research K its history has required a supporting to find new and better methods and materials to staff as large and diverse as the skilled force who improve GPO’s economy and efficiency. The Testing composed, printed, and bound the documents Division staff were nationally known experts in themselves. From machinists to carpenters to paper analysis, metallurgy, printing processes, inks, chemists to stock keepers, GPO’s support units and adhesives. provided the infrastructure that made possible the production of high quality printed and bound With the growth of GPO after 1900, a program of documents with speed and efficiency. apprentice training was started in the 1920s that CHAPTER 4 provided trained journeypersons for the printing and Employees in the Engineering divisions kept binding ranks, as well as the skilled support areas. Support and Administration machinery repaired, often made necessary This chapter includes photos of apprentices at work Behind the Scenes parts, maintained and improved the buildings, throughout the plant. The apprentice school grew and provided light, heat, and motive power. The to be a “university of printing and binding,” turning Stores Division tallied and moved the vast stock out generations of GPO printers, proofreaders, of raw materials like paper and binding materials bookbinders, platemakers, compositors, and other throughout GPO’s plant. GPO carpenters and skilled craftspeople. cabinetmakers produced specialized furniture and fixtures. GPO was for much of its history almost In addition to operations that directly supported entirely self-sufficient. -

E Ighty-Fourth Annual Commencement June 9) 1978
E ighty-Fourth Annual Commencement June 9) 1978 CALIFORNIA INSTITUTE OF TECHNOLOGY CALIFORNIA INSTITUTE OF TECHNOLOGY Eighty- Fourth Annual ~ornrnencernent FRIDAY MORNING AT TEN-THIRTY O'CLOCK JUNE NINTH, NINETEEN SEVENTY-EIGHT The Commencement Ceremony These tribal rites have a very long history. They go back to the ceremony of initiation for new university tea chers in mediaeval Europe. It was then customary for studentsl after an appropriate apprenticeship to learning and the presentation of a thesis as their masterpiece, to be admitted to the Guild of Masters of Arts and granted the license to teach. In the ancient University of Bologna this right was granted by authority of the Pope and in the name of the Holy Trinity. We do not this day claim such high authority. As in any other guild, whether craft or merchant, the master's status was crucial. In theory at least, it separated the men from the boys, the competent from the incom petent. On the way to his master's degree, a student might collect a bachelor's degree in recognition of the fact that he was half-trained, or partially eqnipped. The doctor's degree was somewhat different. Originally indistinguishable from the masters, the doctors gradually emerged by a process of escalation into a supermagisterial role-first of all in the higher faculties of theology, law, and medicine. It will come as no surprise that the lawyers had a particular and early yen for this special distinction. These gradations and distinctions are reflected in the quaint and colorful niceties of academic dress. -

Mark Hallen Research Assistant Professor Toyota Technological Institute at Chicago E-Mail: [email protected] Website
Mark Hallen Research Assistant Professor Toyota Technological Institute at Chicago E-mail: [email protected] Website: http://ttic.uchicago.edu/~mhallen/ Education PhD in Computer Science, May 2016, Duke University, Durham, NC, with a certificate in Structural Biology and Biophysics. Advisor: Bruce Donald. Thesis topic: Protein and drug design algorithms using improved biophysical modeling. GPA: 3.97 BS (summa cum laude, Phi Beta Kappa) in Chemistry (ACS certified) and Mathematics (with distinction; senior thesis: “Improving the Accuracy and Scope of Quantitative FRAP analysis”), May 2009, Duke University. Undergraduate GPA: 3.94 High school diploma, May 2006, Cary Academy, Cary, NC. Honors and Awards • Dolores Zohrab Liebmann fellow, 2015 • Kamin poster award, Duke biochemistry departmental retreat, 2014 • PhRMA Informatics fellow, 2012 • National Defense Science and Engineering Graduate Fellow, 2009 • James B. Duke fellow, 2009 • Julia Dale Prize, Duke math department, 2009 • Goldwater scholar, 2008 • PRUV fellow (for summer research in math at Duke), 2008 • National Merit Scholarship, 2006 • National Chemistry Olympiad finalist; attended two-week study and US team selection camp at the US Air Force Academy, Colorado Springs, CO, June 2006 • USA Mathematical Olympiad qualifier, 2006 • USA Biology Olympiad semifinalist, 2004 • 5th in US (1st in NC) on American Mathematics Competition (AMC) (10A division), 2004 Languages • Java o Wrote large portion of OSPREY protein design software; leading ongoing refactoring effort • Other programming languages: Python, C++, HTML, MATLAB • Natural languages: English, Spanish, French, Russian Professional Experience • PhD thesis research performed with Dr. Bruce Donald; also performed research with Drs. Lingchong You, David Beratan, and Michael Fitzgerald in the first year of graduate school. -

Use of Origami in Mathematics Teaching: an Exemplary Activity
Asian Journal of Education and Training Vol. 6, No. 2, 284-296, 2020 ISSN(E) 2519-5387 DOI: 10.20448/journal.522.2020.62.284.296 © 2020 by the authors; licensee Asian Online Journal Publishing Group Use of Origami in Mathematics Teaching: An Exemplary Activity Davut Köğce Niğde Ömer Halisdemir University, Faculty of Education, Department of Elementary Mathematics Education Turkey. Abstract Students’ attitudes and motivations toward mathematics decrease as they intensively confront cognitive information along the process of mathematics teaching in general. One of the most important reasons for this is the lack of activities for affective and psychomotor domains in the mathematics teaching process. One way to overcome this problem is to include activities through which students can participate effectively in the teaching process. For example, activities performed using origami can be one of them in teaching the attainments covered by the field of geometry learning in mathematics curriculum. Therefore, this study was carried out to present an exemplary activity about how origami can be used when teaching mathematics in secondary schools and to identify preservice teacher opinions on this activity. The activity presented in this study was performed with 32 preservice elementary mathematics teachers attending the faculty of education at a university and taking the Mathematics Teaching with Origami course, and their opinions were taken afterwards. At the end of the application, the preservice teachers stated that such activities would have very positive contributions to students’ mathematics learning. In addition, the preservice teachers communicated and exchanged ideas with each other during the application. It is therefore recommended to use such activities in mathematics teaching.