Mars Weather and Predictability: Modeling and Ensemble Data Assimilation of Spacecraft Observations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

3.1 Discipline Science Results
CASSINI FINAL MISSION REPORT 2019 1 SATURN Before Cassini, scientists viewed Saturn’s unique features only from Earth and from a few spacecraft flybys. During more than a decade orbiting the gas giant, Cassini studied the composition and temperature of Saturn’s upper atmosphere as the seasons changed there. Cassini also provided up-close observations of Saturn’s exotic storms and jet streams, and heard Saturn’s lightning, which cannot be detected from Earth. The Grand Finale orbits provided valuable data for understanding Saturn’s interior structure and magnetic dynamo, in addition to providing insight into material falling into the atmosphere from parts of the rings. Cassini’s Saturn science objectives were overseen by the Saturn Working Group (SWG). This group consisted of the scientists on the mission interested in studying the planet itself and phenomena which influenced it. The Saturn Atmospheric Modeling Working Group (SAMWG) was formed to specifically characterize Saturn’s uppermost atmosphere (thermosphere) and its variation with time, define the shape of Saturn’s 100 mbar and 1 bar pressure levels, and determine when the Saturn safely eclipsed Cassini from the Sun. Its membership consisted of experts in studying Saturn’s upper atmosphere and members of the engineering team. 2 VOLUME 1: MISSION OVERVIEW & SCIENCE OBJECTIVES AND RESULTS CONTENTS SATURN ........................................................................................................................................................................... 1 Executive -

Radiative Forcing of the Stratosphere of Jupiter, Part I: Atmospheric
*(Revised) Manuscript, clean version Click here to download (Revised) Manuscript, clean version: Manuscript.pdf Click here to view linked References 1 2 3 4 5 Radiative Forcing of the Stratosphere of Jupiter, Part I: 6 7 Atmospheric Cooling Rates from Voyager to Cassini 8 9 10 a, b a c d e 11 X. Zhang *, C.A. Nixon , R.L. Shia , R.A. West , P.G. J. Irwin , R.V. Yelle , M.A. 12 a,c a 13 Allen , Y.L. Yung 14 15 16 17 18 a Division of Geological and Planetary Sciences, California Institute of Technology, 19 20 Pasadena, CA, 91125, USA 21 b 22 NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA 23 c 24 Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, 25 Pasadena, CA 91109, USA 26 d 27 Atmospheric, Oceanic, and Planetary Physics, University of Oxford, Clarendon 28 29 Laboratory, Parks Road, Oxford, OX1 3PU,UK 30 e 31 Department of Planetary Sciences, University of Arizona, Tucson, Arizona, USA 32 33 34 35 36 *Corresponding author at: Division of Geological and Planetary Sciences, California 37 38 Institute of Technology, Pasadena, CA, 91125, USA. 39 40 E-mail address: [email protected] (X. Zhang) 41 42 43 44 45 46 47 Submitted to: 48 49 Plan. Space Sci. (PSS) Special issue on Outer planets systems 50 51 52 53 54 55 56 57 58 59 60 61 62 63 1 64 65 1 2 3 4 Abstract 5 6 7 8 We developed a line-by-line heating and cooling rate model for the stratosphere of 9 10 Jupiter, based on two complete sets of global maps of temperature, C2H2 and C2H6, 11 12 retrieved from the Cassini and Voyager observations in the latitude and vertical plane, 13 with a careful error analysis. -

Proquest Dissertations
Detailed study of the Yarkovsky effect on asteroids and solar system implications Item Type text; Dissertation-Reproduction (electronic) Authors Spitale, Joseph Nicholas Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction or presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 07/10/2021 08:04:24 Link to Item http://hdl.handle.net/10150/279835 INFORMATION TO USERS This manuscript has t)een reproduced from the microfilm master. UMI films the text directly from the original or copy submitted. Thus, some thesis and dissertation copies are in typewriter face, while others may be from any type of computer printer. The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleedthrough, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send UMI a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. Oversize materials (e.g., maps, drawings, charts) are reproduced by sectioning the original, beginning at the upper left-hand comer and continuing from left to right in equal sections with small overiaps. Photographs included in the original manuscript have been reproduced xerographically in this copy. Higher quality 6" x 9' black and white photographic prints are available for any photographs or illustrations appearing in this copy for an additional charge. -
TRANSIT the Newsletter Of
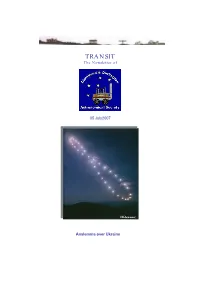
TRANSIT The Newsletter of 05 July2007 Analemma over Ukraine Front page image: If you took a picture of the Sun at the same time each day, would it remain in the same position? The answer is no, and the shape traced out by the Sun over the course of a year is called an analemma. The Sun's apparent shift is caused by the Earth's motion around the Sun when combined with the tilt of the Earth's rotation axis. The Sun will appear at its highest point of the analemma during summer and at its lowest during winter. Vasilij Rumyantsev ( Crimean Astrophysical Obsevatory) Editorial Last meeting: 8 June 2007 - Keith Johnson delivered a talk on "Astrophotography" whilst seated in front of his computer. He walked us through the technique of using the free Registax software in processing AVIs obtained with a simple and inexpensive Webcam. His choice of subjects to work with were fascinating, an occultation of Saturn by the Moon and a series of Saturn captures. When first seen by non-astroimagers the processing seems hyper- technical but with a good guide through the process by an enthusiast like Keith showed it can be easily learned and that the software itself is very intuitive. The final results always justify the efforts involved judging from Keith’s completed images. Next meeting : Friday, September 14, 2007 subject and presenter to be announced by the Secretary in his Summer Newsletter. Location, Wynyard Planetarium Letters to the Editor : From John Crowther :- We had a 24 page Transit last month completing our 2006-2007 season before the summer break. -

Chronophilia; Or, Biding Time in a Solar System
Chronophilia; or, Biding Time in a Solar System MARCUS HALL Department of Evolutionary Biology and Environmental Studies, University of Zurich, Switzerland Abstract Having evolved in a dynamic solar system, all life on earth has adapted to and de- pends on recurring and repeating cycles of light, heat, and gravity. Our sleep cycles, repro- ductive cycles, and emotional cycles are all linked in varying ways to planetary motion even though we continually disrupt, modify, or extend these cycles to go about our personal and collective business. This essay explores how our sense of time is both physiological and cul- tural, with deep ramifications for confronting such challenges as jet lag, navigation, calendar construction, shift work, and even life span. Although chronobiologists have posited the existence of a Zeitgeber, or external master clock that serves to reset our internal clocks, it hasbecomeclearthatanymasterclockreliesasmuchonnaturalelements(suchasarising sun) as cultural elements (such as an alarm clock). Moreover the “circa” of circadian rhythms, suggests that our activities and emotions recur, not in exact twenty-four-hour cycles, but in more plastic and approximate cycles that, according to circumstance and individual, may span somewhat longer or shorter periods than one earthly rotation. Or as one chronobiolo- gist explains, “Any one physiologic variable is characterized by a spectrum of rhythms that aregeneticallyanchored,sociologicallysynchronized...andinfluenced by heliogeophysical effects.” As we contemplate faster and further travel and other activities that disrupt our biorhythms, we need to develop greater awareness of chronophilia, our attachment to rhythm, our love of familiar time. Keywords chronobiology, biorhythm, circadian, desynchrony, jet lag, shift work, sense of time ven before the newborn infant takes his or her first gasps of air, he or she has settled E into recurring patterns of rest and activity. -
Workshop on Planetary Atmospheres, P
PROGRAM AND ABSTRACTS LPI Contribution No. 1376 Workshop on Planetary Atmospheres November 6–7, 2007 Greenbelt, Maryland SPONSORED BY Lunar and Planetary Institute National Aeronautics and Space Administration SCIENTIFIC ORGANIZING COMMITTEE Don Banfield, Cornell University Jay T. Bergstralh, NASA Langley Research Center Mark Bullock, Southwest Research Institute Philippe Crane, NASA Headquarters Neil Dello Russo, Johns Hopkins University, Applied Physics Laboratory Heidi B. Hammel, Space Science Institute David L. Huestis, SRI International, Molecular Physics Laboratory Carey M. Lisse, Johns Hopkins University, Applied Physics Laboratory Julianne I. Moses, Lunar and Planetary Institute Adam P. Showman, University of Arizona Amy A. Simon-Miller, NASA Goddard Space Flight Center LOCAL ORGANIZING COMMITTEE Philippe Crane, NASA Headquarters Monica Washington, NASA Research and Education Support Services Lunar and Planetary Institute 3600 Bay Area Boulevard Houston TX 77058-1113 LPI Contribution No. 1376 Compiled in 2007 by LUNAR AND PLANETARY INSTITUTE The Institute is operated by the Universities Space Research Association under Agreement No. NCC5-679 issued through the Solar System Exploration Division of the National Aeronautics and Space Administration. Any opinions, findings, and conclusions or recommendations expressed in this volume are those of the author(s) and do not necessarily reflect the views of the National Aeronautics and Space Administration. Material in this volume may be copied without restraint for library, abstract service, education, or personal research purposes; however, republication of any paper or portion thereof requires the written permission of the authors as well as the appropriate acknowledgment of this publication. Abstracts in this volume may be cited as Author A. B. (2007) Title of abstract. -

How to Construct a Nugget
How to Construct a Nugget Scott G. Edgington Mary Beth Murrill Morgan L. Cable Linda J. Spilker OPAG Meeting, August 24-26, 2015 (c) 2015 California Institute of Technology. Government sponsorship acknowledged. Nuggets * What scientists think What NASA HQ says What we wish they were: a they are they are relaxing beverage (*A variety of hops with a floral, resiny aroma and flavor. Primarily a bittering hop.) Graffiti on Tethys Newly discovered red arcs on Saturn’s moon Tethys are mystifying because they are not linked to any obvious geologic features. The graffiti-like arcs were found in enhanced-color images taken by Cassini April 11, 2015. Their presence on the hemisphere coated by recent water-ice grains from Saturn’s E ring suggests that the features are young or reddish material is being resupplied. The next opportunity to observe them even closer will be November 11, 2015 during a 8,300 km flyby. Reddish arcs are illustrated in this magnified, infrared-enhanced color image (above). The origin and composition of the red arcs are currently unknown, but there may be an analogy with reddish-tinted bands observed on Jupiter’s water world, Europa. Enhanced-color image (left) shows one hemisphere is stained by Saturn’s radiation belts while the other is spray-painted white by water ice particles orbiting the planet. Press Release - http://go.nasa.gov/1D98I5Y The Mindset of a Nugget • Consider the nugget a stand-alone product. This may be the first and only time the reader ever hears of this result. • Write for a political science major who avoided classes in the physical sciences. -

Radiative -Convective Equilibrium Calculations for a Two-Layer Mars Atmosphere C
~~ NASr-21(07] MEMORANDUM RM-5017-NASA MAP 1900 RADIATIVE -CONVECTIVE EQUILIBRIUM CALCULATIONS FOR A TWO-LAYER MARS ATMOSPHERE C. B, Leovy This research is sponsored by the National Aeronautics and Space Administration under Contract No. NASr-21. This report does not necessarily represent the views of the National Aeronautics and Space Administration. I 7k R4 fl D- 1700 MAIN 51 - SANlA MONICA CALIFORNIA - *0401 Published bv The RANDCot poiation PREFACE As a preliminary to a numerical experiment in simulating the cir- culation of the Mars atmosphere, it was necessary to develop a method for evaluating heat flow into and out of the atmosphere. The first portion of this paper describes such a model, as it will be used in conjunction with the general circulation computer program of A. Arakawa and Y. Mintz. As a preliminary to the general circulation experiment, the heating model was applied to the computation of temperature variations in the Martian atmosphere and soil. The results of these calculations turned out to have interesting implications for the polar caps and for the probable characteristics of the atmospheric circulation. These results and implications, as well as possible experiments suggested by them, are discussed in this paper. PRECEDING PAGE BLANK NOT FILMED. -V- I .-- Diurnal and seasonal variations of ground and atmospheric temper- atures on Mars are simulated by a model that incorporates the effects of radiation, small-scale turbulent convection, and conduction into the ground. The model is based on the assumptions that the surface pressure is 5 mb, and the atmosphere is composed entirely of carbon dioxide. -

Ice Giant Circulation Patterns: Implications for Atmospheric Probes
Space Sci Rev (2020) 216:21 https://doi.org/10.1007/s11214-020-00646-1 Ice Giant Circulation Patterns: Implications for Atmospheric Probes Leigh N. Fletcher1 · Imke de Pater2 · Glenn S. Orton3 · Mark D. Hofstadter3 · Patrick G.J. Irwin4 · Michael T. Roman1 · Daniel Toledo4 Received: 5 July 2019 / Accepted: 15 February 2020 / Published online: 24 February 2020 © The Author(s) 2020 Abstract Atmospheric circulation patterns derived from multi-spectral remote sensing can serve as a guide for choosing a suitable entry location for a future in situ probe mission to the Ice Giants. Since the Voyager-2 flybys in the 1980s, three decades of observations from ground- and space-based observatories have generated a picture of Ice Giant circulation that is complex, perplexing, and altogether unlike that seen on the Gas Giants. This review seeks to reconcile the various competing circulation patterns from an observational perspective, accounting for spatially-resolved measurements of: zonal albedo contrasts and banded ap- pearances; cloud-tracked zonal winds; temperature and para-H2 measurements above the condensate clouds; and equator-to-pole contrasts in condensable volatiles (methane, ammo- nia, and hydrogen sulphide) in the deeper troposphere. These observations identify three distinct latitude domains: an equatorial domain of deep upwelling and upper-tropospheric subsidence, potentially bounded by peaks in the retrograde zonal jet and analogous to Jo- vian cyclonic belts; a mid-latitude transitional domain of upper-tropospheric upwelling, vig- orous cloud activity, analogous to Jovian anticyclonic zones; and a polar domain of strong subsidence, volatile depletion, and small-scale (and potentially seasonally-variable) convec- tive activity. -

2D Photochemical Modeling of Saturn's Stratosphere. Part I
2D photochemical modeling of Saturn’s stratosphere Part I: Seasonal variation of atmospheric composition without meridional transport V. Huea,b,∗, T. Cavali´ec, M. Dobrijevica,b, F. Hersanta,b, T. K. Greathoused aUniversit´ede Bordeaux, Laboratoire d’Astrophysique de Bordeaux, UMR 5804, F-33270 Floirac, France bCNRS, Laboratoire d’Astrophysique de Bordeaux, UMR 5804, F-33270, Floirac, France cMax-Planck-Institut f¨ur Sonnensystemforschung, 37077, G¨ottingen, Germany dSouthwest Research Institute, San Antonio, TX 78228, United States Abstract Saturn’s axial tilt of 26.7◦ produces seasons in a similar way as on Earth. Both the stratospheric temperature and composition are affected by this latitudinally varying insolation along Saturn’s orbital path. A new time- dependent 2D photochemical model is presented to study the seasonal evo- lution of Saturn’s stratospheric composition. This study focuses on the im- pact of the seasonally variable thermal field on the main stratospheric C2- hydrocarbon chemistry (C2H2 and C2H6) using a realistic radiative climate model. Meridional mixing and advective processes are implemented in the model but turned off in the present study for the sake of simplicity. The results are compared to a simple study case where a latitudinally and tem- porally steady thermal field is assumed. Our simulations suggest that, when the seasonally variable thermal field is accounted for, the downward diffusion of the seasonally produced hydrocarbons is faster due to the seasonal com- pression of the atmospheric column during winter. This effect increases with arXiv:1504.02326v1 [astro-ph.EP] 9 Apr 2015 increasing latitudes which experience the most important thermal changes in the course of the seasons. -
ISIMA Report On: Torque on an Exoplanet from an Anisotropic Evaporative Wind
Mon. Not. R. Astron. Soc. 000, 000{000 (0000) Printed 2 September 2014 (MN LATEX style file v2.2) ISIMA report on: Torque on an exoplanet from an anisotropic evaporative wind Jean Teyssandier1;2, James E. Owen3, Fred C. Adams4;5, & Alice C. Quillen6 1 Institut d'Astrophysique de Paris, UPMC Univ Paris 06, CNRS, UMR7095, 98 bis bd Arago, F-75014, Paris, France 2 Department of Astrophysics, University of Oxford, Keble Road, Oxford OX1 3RH, England 3 Canadian Institute for Theoretical Astrophysics, University of Toronto, 60 St. George Street, Toronto, Ontario, Canada 4 Michigan Center for Theoretical Physics Physics Department, University of Michigan, Ann Arbor, MI 48109, USA 5 Astronomy Department, University of Michigan, Ann Arbor, MI 48109, USA 6 Department of Physics and Astronomy, University of Rochester, Rochester, NY 14627, USA 2 September 2014 ABSTRACT Winds from short-period Earth and Neptune mass exoplanets, driven by X-ray and EUV radiation from a young star, may evaporate a significant fraction of a planet's mass. If the momentum flux from the evaporative wind is not aligned with the planet/star axis, then it can exert a torque on the planet's orbit. Using steady-state one-dimensional evaporative wind models by Owen & Jackson (2012), we estimate this torque using a lag angle that depends on the product of the speed of the planet's upper atmosphere and a flow timescale for the wind to reach its sonic radius. We also estimate the momentum flux from time-dependent one-dimensional hydrodynamical simulations. We find that only in a very narrow regime in planet radius, mass and stellar radiation flux is a wind capable of exerting a significant torque on the planet's orbit. -

Chronophilia; Or, Biding Time in a Solar System
Zurich Open Repository and Archive University of Zurich Main Library Strickhofstrasse 39 CH-8057 Zurich www.zora.uzh.ch Year: 2019 Chronophilia; or, Biding Time in a Solar System Hall, Marcus Abstract: Having evolved in a dynamic solar system, all life on earth has adapted to and depends on recurring and repeating cycles of light, heat, and gravity. Our sleep cycles, reproductive cycles, and emotional cycles are all linked in varying ways to planetary motion even though we continually disrupt, modify, or extend these cycles to go about our personal and collective business. This essay explores how our sense of time is both physiological and cultural, with deep ramifications for confronting such challenges as jet lag, navigation, calendar construction, shift work, and even life span. Although chronobiologists have posited the existence of a Zeitgeber, or external master clock that serves to reset our internal clocks, it has become clear that any master clock relies as much on natural elements (such as a rising sun) as cultural elements (such as an alarm clock). Moreover the “circa” of circadian rhythms, suggests that our activities and emotions recur, not in exact twenty-four-hour cycles, but in more plastic and approximate cycles that, according to circumstance and individual, may span somewhat longer or shorter periods than one earthly rotation. Or as one chronobiologist explains, “Any one physiologic variable is characterized by a spectrum of rhythms that are genetically anchored, sociologically synchronized . and influenced by heliogeophysical effects.” As we contemplate faster and further travel and other activities that disrupt our biorhythms, we need to develop greater awareness of chronophilia, our attachment to rhythm, our love of familiar time.