Reduced Model Design of a Floating Wind Turbine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Four Months in a Sneak-Box
Four Months in a Sneak-Box Nathaniel H. Bishop The Project Gutenberg EBook of Four Months in a Sneak-Box, by Nathaniel H. Bishop (#2 in our series by Nathaniel H. Bishop) Copyright laws are changing all over the world. Be sure to check the copyright laws for your country before downloading or redistributing this or any other Project Gutenberg eBook. This header should be the first thing seen when viewing this Project Gutenberg file. Please do not remove it. Do not change or edit the header without written permission. Please read the "legal small print," and other information about the eBook and Project Gutenberg at the bottom of this file. Included is important information about your specific rights and restrictions in how the file may be used. You can also find out about how to make a donation to Project Gutenberg, and how to get involved. **Welcome To The World of Free Plain Vanilla Electronic Texts** **eBooks Readable By Both Humans and By Computers, Since 1971** *****These eBooks Were Prepared By Thousands of Volunteers!***** Title: Four Months in a Sneak-Box Author: Nathaniel H. Bishop Release Date: May, 2004 [EBook #5686] [Yes, we are more than one year ahead of schedule] [This file was first posted on August 7, 2002] Edition: 10 Language: English Character set encoding: ASCII *** START OF THE PROJECT GUTENBERG EBOOK, FOUR MONTHS IN A SNEAK-BOX *** This eBook was produced by Bruce Miller FOUR MONTHS IN A SNEAK-BOX. A BOAT VOYAGE OF 2600 MILES DOWN THE OHIO AND MISSISSIPPI RIVERS, AND ALONG THE GULF OF MEXICO. -

Four Months in a Sneak-Box : a Boat Voyage of 2600 Miles Down The
THE UNIVERSITY OF ILLINOIS LIBRARY ILLINOiS RISTORICAI SURVEY Four Months in a Sneak- Box. A BOAT VOYAGE OF 260O MILES DOWN THE OHIO AND MISSISSIPPI RIVERS, AND ALONG THE GULF OF MEXICO. BY NATHANIEL H. BISHOP, AUTHOR OF "a THOUSAND MILEs' WALK ACROSS SOUTH AMERICA,' ANU '"VoVAOE OK THE PAl'ER CANUii." BOSTON: LEE AND SHEPARD, PUBLISHERS. NEW YORK: CHARLES T. DILLINGHAM. 1S79. COPYRIGHT, 1S79, By Nathaniel II. Bishop. Electrotyped at the Boston Stereotype Foundry, 19 Spring Laue. TO THE OFFICERS AND EMPLOYEES OF THE LIGHT HOUSE ESTABLISHMENT OF THE UNITED STATES Sbls ^ook is pcb'uatcb BY ONE WHO HAS LEARXED TO RESPECT THEIR HONEST, INTELLIGENT AND EFFICIENT LABORS IN SERVING THEIR GOVERNMENT, THEIR COUNTRYMEN, AND MANKIND GENERALLY. 1085S7 — INTRODUCTION. Eighteen months ago the author gave to the " public his Voyage of the Paper Canoe : — a geographical journey of 25oo miles from Ql'ebec to the Gulf of Mexico, during the YEARS 1874-5." The kind reception by the American press of the author's first journey to the great southern sea, and its republication in Great Britain and in France within so short a time of its appearance in the United States, have encouraged him to give the public a companion volume, "Four Months in A Sneak-Box," — which is a relation of the expe- riences of a second cruise to the Gulf of INIexico, but by a different route from that followed in the " Voyage of the Paper Canoe." This time the author procured one of the smallest and most com- fortable of boats — a purely American model, devel- oped bv the bay-men of the New Jersey coast of the United States, and recently introduced to the gunning V VI INTRODUCTION. -
Thomas Point: Chesapeake Bay's Most Famous Lighthouse
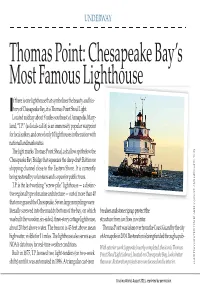
UNDERWAY Thomas Point: Chesapeake Bay’s Most Famous Lighthouse f there is one lighthouse that symbolizes the beauty and his‐ I tory of Chesapeake Bay, it is Thomas Point Shoal Light. Located midbay about 8 miles southeast of Annapolis, Mary‐ land, “T.P.” (as locals call it) is an immensely popular waypoint for local sailors, and one of only 10 lighthouses in the nation with national landmark status. ) The light marks Thomas Point Shoal, a shallow spit below the TOP Chesapeake Bay Bridge that squeezes the deep‐draft Baltimore shipping channel close to the Eastern Shore. It is currently OPPOSITE, being restored by volunteers and is open for public tours. AND T.P. is the last working “screw‐pile” lighthouse — a distinc‐ tive regional type of marine architecture — out of more than 40 VE (ABO that once graced the Chesapeake. Seven large iron pilings were Y literally screwed into the muddy bottom of the bay, on which breaker and stone riprap protect the BLAKEL was built the wooden, six‐sided, three‐story cottage lighthouse, structure from ice floes in winter. about 20 feet above water. The beacon is 43 feet above mean Thomas Point was taken over from the Coast Guard by the city STEPHEN high water, visible for 11 miles. The lighthouse also serves as an of Annapolis in 2004. Restoration is being funded through a pub‐ OF NOAA data buoy for real‐time weather conditions. With exterior work (opposite) nearly completed, the iconic Thomas Y Built in 1875, T.P. housed two light‐tenders (on two‐week Point Shoal Light (above), located on Chesapeake Bay, looks better TES shifts) until it was automated in 1986. -

Programmatic Environmental Assessment of Field Operations in the Northeast and Great Lakes National Marine Sanctuaries
Programmatic Environmental Assessment of Field Operations in the Northeast and Great Lakes National Marine Sanctuaries August 7, 2018 http://sanctuaries.noaa.gov National Oceanic and Atmospheric Administration U.S. Secretary of Commerce Wilbur Ross Under Secretary of Commerce for Oceans and Atmosphere and NOAA Administrator RDML Tim Gallaudet, Ph.D., USN Ret. (Acting) Assistant Administrator for Ocean Services and Coastal Zone Management, National Ocean Service Russell Callender, Ph.D. Office of National Marine Sanctuaries John Armor, Director Rebecca Holyoke,Deputy Director Matt Brookhart, Acting Northeast and Great Lakes Regional Director Cover Photo The bow of the two-masted schooner EB Allen, sunk in 1871, and now lies within Thunder Bay National Marine Sanctuary. Photo: Tane Casserley/NOAA, Thunder Bay NMS Table of Contents Table of Contents Acknowledgments ........................................................................................ iii Introduction .................................................................................................. iv 1.0 Purpose and Need ....................................................................................1 1.1 Purpose for the Action ............................................................................... 1 1.2 Need for the Action ..................................................................................... 1 2.0 Description of Proposed Action and Alternatives ................................2 2.1 Alternatives Considered But Not Analyzed in Further Detail -

Super 8 Vessels for CFEC In-House Use
Super 8 Vessels for CFEC In-house Use CFEC Report 15-5N December, 2015 Prepared by Craig Farrington Commercial Fisheries Entry Commission 8800 Glacier Highway #109 P.O. Box 110302 Juneau, Alaska 99811-0302 (907) 789 6160 OEO / ADA Compliance Statement The Commercial Fisheries Entry Commission is administratively attached to the Alaska Department of Fish and Game (ADF&G). The Alaska Department of Fish and Game (ADF&G) administers all programs and activities free from discrimination based on race, color, national origin, age, sex, religion, marital status, pregnancy, parenthood, or disability. The department administers all programs and activities in compliance with Title VI of the Civil Rights Act of 1964, Section 504 of the Rehabilitation Act of 1973, Title II of the Americans with Disabilities Act of 1990, the Age Discrimination Act of 1975, and Title IX of the Education Amendments of 1972. If you believe you have been discriminated against in any program, activity, or facility please write: ADF&G ADA Coordinator, P.O. Box 115526, Juneau, AK 99811-5526; U.S. Fish and Wildlife Service, 4401 N. Fairfax Drive, MS 2042, Arlington, VA 22203; Office of Equal Opportunity, U.S. Department of the Interior, 1849 C Street NW MS 5230, Washington DC 20240. The department’s ADA Coordinator can be reached via phone at the following numbers: (VOICE) 907-465-6077 (Statewide Telecommunication Device for the Deaf) 1-800-478-3648 (Juneau TDD) 907-465-3646 (FAX) 907-465-6078 For information on alternative formats and questions on this publication, please contact: Craig Farrington; CFEC;P.O. Box 110302; Juneau, AK 99811-0302. -

Interactions Between Axial and Transverse
INTERACTIONS BETWEEN AXIAL AND TRANSVERSE DRAINAGE SYSTEMS IN THE LATE CRETACEOUS C ORDILLERAN FORELAND BASIN: EVIDENCE FROM DETRITAL ZIRCONS IN THE STRAIGHT CLIFFS FORMATION, SOUTHERN UTAH by Tyler Scott Szwarc A thesis submitted to the faculty of The University of Utah in partial fulfillment of the requirements for the degree of Master of Science in Geology Department of Geology and Geophysics The University of Utah May 2014 Copyright © Tyler Scott Szwarc 2014 All Rights Reserved The University of Utah Graduate School STATEMENT OF THESIS APPROVAL The thesis of ____________________ Tyler Scott Szwarc has been approved by the following supervisory committee members: Cari L. Johnson , Chair 10/4/2013 Date Approved ____________Lisa E. Stright2 __________________ ■, Member 10/4/2013__ Date Approved Diego P. Fernandez , Member 10/4/2013 Date Approved and by ___________________ John M. Bartley___________________ , Chair/Dean of the Department/College/School o f ____________ Geology and Geophysics___________ and by David B. Kieda, Dean of The Graduate School. ABSTRACT New detrital zircon geochronologic data from the Straight Cliffs Formation of southern Utah provide insight into the controls on stratigraphic architecture of the Western Interior basin during Turonian-Campanian time. Straight Cliffs Formation deposition was influenced by the development of topography in the Sevier fold-thrust belt, but to date, little emphasis has been placed on the tectonic development of the Mogollon highlands of central Arizona. Detrital zircon ages (N=40, n=3650) derived from linked fluvial and shallow marine depositional systems throughout the Kaiparowits Plateau indicate the majority of fluvial sediment was derived from the Mogollon highlands (67%), with subordinate contributions delivered from the Sevier thrust belt (17%) and Cordilleran volcanic sources (16%). -

Electrodeposition of Minerals in Sea Water: Experiments and Applications
IEEE JOURNAL ON OCEANIC ENGINEERING, VOL. OE-4, NO.3, JULY 1979 Electrodeposition of Minerals in Sea Water: Experiments and Applications WOLF H. HILBERTZ AbllT17CI_By establishing :a direcl eleclric:al current belween elec TABLE I trodes in an eleclrolyle like sea water, caldum urbontes. magne$.ium EleCTROC~leMICAL REACTIONS hydroxides, and hydrogen are precipilUed U the calhode, while the :anode produces oxygen :and chlorine. Recenl experiments have demon. t ANODE ~rHODE strated in pan the feuibilily of using lhe electrodeposited mineJais as building materials for :a wide variely of purposes, including the con. INoCIJ struction of arlificial reefs. Several of these experiments are described and some implicalions for maline building technology ale discussed. I. INTRODUCTION EA WATER contains nine major elements: sodium, mag Snesium, calcium, potassium, strontium, chlorine, sulfur. bromine, and carbon. These elements comprise more than 99.9 percent of the total dissolved salts in the ocean (1)-[4). The conSlancy of the ratios of the major elements throughout the oceans has long been well known [5 J. In 1837. following the work of Davy on the protection of iron by zinc anodes. Mallet demonstrated that zinc so used became covered with a thick JeOwQW.2gvc:roge layer of zinc oxide and calciferous crystals which blocked the reducll()tl zinc surface (6), [7). In 1940 and 1947. G. C. Cox was issued .,,,."" U.S. Patents No.2 200 469 and No.2 417 064. outlining methods of cathodic cleaning and protection of metallic sur. II. EXPERIM ENTS faces submerged in sea water by means of a direct electrical current. -

Keith N. Meverden, Tamara L. Thomsen, and John O
Wheat Chaff and Coal Dust: Underw ater Archaeologicallnvestigations of the Grain Schooners Daniel Lyons and Kate Kelly State Archaeology and Maritime Preservation Program Technical Report Series 006-002 W I S CONS I N I HISTORICAL I SOC IETY Keith N. Meverden, Tamara L. Thomsen, and John O. Jensen Funded by the University of Wisconsin Sea Grant Institute and the National Sea Grant College Program, National Oceanic and Atmospheric Administration, U.S. Department of Commerce, and the State of Wisconsin, Grant ¹ NA16RG2257; the Wisconsin Coastal Management Program and the National Oceanic and Atmospheric Administration, Office of Ocean and Coastal Resource Management under the Coastal Zone Management Act, Grant ¹ NA03NOS4190106, and the Wisconsin Department of Transportation Enhancementsprogram. This report was prepared by the Wisconsin Historical Society under award ¹ C/C-7 from the University of Wisconsin Sea Grant Institute, award ¹ 84003-004.21 from the National Oceanic and Atmospheric Administration, U.S. Department of Commerce, and under award ¹ 5101-02-75 from the Wisconsin Department of Transportation. The statements,findings, conclusions, and recommendations are those of the authors and do not necessarily reflect the views of the National Oceanic and Atmospheric Administration, the U.S. Department of Commerce, the Wisconsin Department of Transportation, the University of Wisconsin Sea Grant Institute, or the National Sea Grant College Program. i'va, [73 wisccrmv cwsnc i 'd >Id4 IVlmacavzxrPmxmea ~ I The Daniel Lyons was listed on the National Register of Historic Places on 3 October 2007. The Kate Kelly was listed on the National Register of Historic Places on 21 November 2007. Cover photo: The Daniel Lyons' bow in 110 feet of water, nine miles northeast of Algoma, Wisconsin. -

Booooooooooooooqooooodoo Pri06 80 Oenc
bOOOOOOOOOOOOOOQOOOOOdOO Pri06 80 OenC,, THE BATTLE OF THE SW ASH A.ND THE CAPTURE OF CANADA. BY SAMUEL BARTON. NEW YORK! OHARLES T. DILLINGHAM, 718 AND 720 BROADWAY, Copyright, 1888, BY SAl\ffRL BARTON. (All Rights Re-served.] STlllREOTYPED BY SAMUEL STODDER, 42 DEY STREET, N. Y. DEDICATION. To THE SENATORS .A.ND EX· SEN.A.TORS, MEMBERS .A.ND EX-Mmd:BJR$, OF PAST .A.ND PRESENT CONGRESSES OF THE UNITED STATES OF A.MERICA, WHO, BY THEIR STUPID .A.ND CRIMIN.AL NEGLECT TO ADOPT ORDINARY DEFENSIVE PRECAUTIONS, OR TO ENCOURAGE THE RECONSTUUCTION OF THE AMERICAN MERCHANT .MARINE, HA.VE RENDERED .A.LL AMERICAN SEAPORT TOWNS LIABLE TO SUCH .AN ATTACK AS 18 HEREIN BUT FAINTLY .A.ND IMPERFECTLY DESCRIBED, THIS IDSTORICAL FORECAST IS DEDI• CATED; WITH MUCH INDIGNATION .A.ND CON~ 'l'EMPT, AND LITTLE OR NO RESPECT, BY THE AUTHOR. CONTENTS Chapter Page Introduction. • . • • • . • • • • • • . • . 5 I. The United States Priorto 1890 ...... · .. .. .. .. 9 II. Secretary Whitney's Efforts to Rebuild the Navy..... 32 III. Canada and the United States. • . • .. 38 IV. Retaliation . • . • . • . • • • • . 56 V. The English Fleet................................ ~. 68 VI. The British Fleet Arrives off Sandy Hook. • . 73 VII. The Battle of the Swash.... .. .. • . • .. • . • • • • • • .. 76 VIII. The Return of the Fleet. .. .. • . • • • • . • • • . .. • .. 95 IX. The Panic and Flight. • • • • . 102 X. The Bombardment .....................••••.•••..... 109 XI. The Armistice and Treaty of Peace. • . • . 118 XII. Conclusion . • . • . • . • • • • • • • • . • . • • • . 122 Appendix . ..... •. • •, •...... •1 •. o,• •• •: • • "· • • •- e.•. •. o. •, .t, e. ..,l.. ltQ [ivl INTRODUCTION. THE only apology which I offer for this authentio account. of an event which (having occurred more than forty years ago), can scarcely be supposed to possess much interest for,the readel' of to-day, is, that having been a par ticipant in. -

Further Notes on the "Oceangoing" Dugouts of North Coastal California
Journal of California and Great Basin Anthropology Vol. 3, No. 2, pp. 269-282 (1981). To Sea or not to Sea: Further Notes on the "Oceangoing" Dugouts of North Coastal California TRAVIS HUDSON N a recent article, Jobson and Hildebrandt 1978; Howorth 1980). Our experiences pro I(1980) offer a model to characterize the vide a slightly different view of the variables function and occurrence of "oceangoing" involved and their relative importance, but are canoes of north coastal Cahfomia, demon offered constructively to clarify various strating what they consider to be "idealized aspects of the Jobson-Hildebrandt model. It trends" relating canoe types and functions will be shown that larger dugouts were not with marine resources and environment. They more seaworthy than smaller ones, and that frame these correspondences into the tenta the reasons for large dugout use in offshore tive proposition that as distance increases to waters were associated with their greater offshore resources, larger oceangoing canoes cargo capacity. were necessary to reduce risk. They suggest THE ASSUMPTIONS that this proposition may help to account for the distribution of other "oceangoing" craft In the model there are several assumptions in California, notably the Chumash plank and statements about the marine environ canoe. Their discussion ends with the warning ment, marine architecture, and craft function. that additional testing of their model is Comments on each of these follow. There are necessary before it can be confirmed or also a number of socio-cultural parameters rejected (Jobson and Hildebrandt 1980:172). within the model which should be of primary Rather than confirm or reject their model, importance for the archaeologist, but due to this paper will attempt to expand it, based on the already considerable length of this paper direct experience in Chumash marine architec they will have to await a future study. -

Japanese Lighthouse on Puluwat Atoll And/Or Common Puluwat Lighthouse 2
FHR-ft-300 (11-78) United States Department of the Interior Heritage Conservation and Recreation Service National Register of Historic Places Inventory Nomination Form See instructions in How to Complete National Register Forms Type ail entries complete applicable sections_______________ 1. Name historic Japanese Lighthouse on Puluwat Atoll and/or common Puluwat Lighthouse 2. Location Allei Island street & number not for publication city, town Puluwat Atoll vicinity of congressional district State % '~ -- state code 96942 county -F*S.M, ' T v u K code 3. Classification Category Ownership Status Present Use district public^ occupied1 agriculture museum building(s) X private X unoccupied commercial park X structure both work in progress educational private residenc;e site Public Acquisition Accessible entertainment religious object _, _ in process JL_ yes: restricted government scientific A/« 4 . being considered . yes: unrestricted industrial transportation no military X other- not in use 4. Owner of Property name Manupi Rapung, Hipwsar Lekul, Taitog Konno, Urutal Kanka street & number Puluwat Island, Puluwat Atoll N/A city, town vicinity of state Trulj State 5. Location of Legal Description courthouse, registry of deeds, etc. N/A street & number N/A N/A city, town state 6. Representation in Existing Surveys A survey of the Japanese Lighthouse on Puluwat Atoll, and recommendations for its reuse. title_____(See Continuation Sheet)______has this property been determined elegibie? —— yes _A_ no date ^ 1979 federal state county local depository for survey records y^ Historic Preservation Office city, town Saipan state C.M. 96950 7. Description Condition Check one Check one excellent deteriorated _X unaltered X original site _jL.good ruins altered moved date _JL_ fair unexposed Describe the present and original (if known) physical appearance Present Appearance The lighthouse complex, if viewed from above, is roughly keyhole shaped; the tower forming the top of the hole, with a four-sided two story operations building connected to it by a short hallway. -

On the Geological Significance of Clastic Parasequences ⁎ Luca Colombera , Nigel P
Earth-Science Reviews xxx (xxxx) xxxx Contents lists available at ScienceDirect Earth-Science Reviews journal homepage: www.elsevier.com/locate/earscirev On the geological significance of clastic parasequences ⁎ Luca Colombera , Nigel P. Mountney School of Earth & Environment, University of Leeds, LS2 9JT Leeds, UK ARTICLE INFO ABSTRACT Keywords: Parasequences recognized in clastic sedimentary successions of shallow-marine origin are considered by some Sequence stratigraphy geologists to be the fundamental building blocks of depositional sequences, even though problems in their de- Shallow marine finition and application have been identified by others, who instead advocate their abandonment asformal Shoreface sequence stratigraphic units. Delta lobe To elucidate the geological significance of clastic parasequences and inform the debate on their usein Sea level stratigraphy, a quantitative characterization of the geometry, facies characteristics and timescale of deposition of Autogenic 1163 parasequences has been undertaken based on a synthesis of data from outcrop and subsurface studies that are available in the scientific literature. Through a database compilation, the attributes of the studied para- sequences are analysed with respect to the interpreted geological origin of the units, and with consideration of sources of bias and uncertainty. Particular emphasis is placed on assessing the following: (i) the importance of heuristics, and of data types and coverage in the recognition of parasequences; (ii) differences in parasequence characteristics observed across deltaic and shoreface depositional systems, and between the Quaternary and the ancient rock record; (iii) possible explanations for the range in timescales of deposition of parasequences; and (iv) the role of autogenic dynamics on the development of deltaic parasequences, partly based on a comparison with the recent evolution of modern deltas.