Melting and Flowing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Equation of State for Benzene for Temperatures from the Melting Line up to 725 K with Pressures up to 500 Mpa†
High Temperatures-High Pressures, Vol. 41, pp. 81–97 ©2012 Old City Publishing, Inc. Reprints available directly from the publisher Published by license under the OCP Science imprint, Photocopying permitted by license only a member of the Old City Publishing Group Equation of state for benzene for temperatures from the melting line up to 725 K with pressures up to 500 MPa† MONIKA THOL ,1,2,* ERIC W. Lemm ON 2 AND ROLAND SPAN 1 1Thermodynamics, Ruhr-University Bochum, Universitaetsstrasse 150, 44801 Bochum, Germany 2National Institute of Standards and Technology, 325 Broadway, Boulder, Colorado 80305, USA Received: December 23, 2010. Accepted: April 17, 2011. An equation of state (EOS) is presented for the thermodynamic properties of benzene that is valid from the triple point temperature (278.674 K) to 725 K with pressures up to 500 MPa. The equation is expressed in terms of the Helmholtz energy as a function of temperature and density. This for- mulation can be used for the calculation of all thermodynamic properties. Comparisons to experimental data are given to establish the accuracy of the EOS. The approximate uncertainties (k = 2) of properties calculated with the new equation are 0.1% below T = 350 K and 0.2% above T = 350 K for vapor pressure and liquid density, 1% for saturated vapor density, 0.1% for density up to T = 350 K and p = 100 MPa, 0.1 – 0.5% in density above T = 350 K, 1% for the isobaric and saturated heat capaci- ties, and 0.5% in speed of sound. Deviations in the critical region are higher for all properties except vapor pressure. -
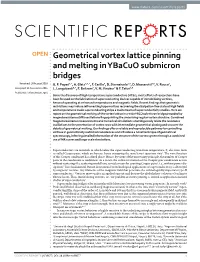
Geometrical Vortex Lattice Pinning and Melting in Ybacuo Submicron Bridges Received: 10 August 2016 G
www.nature.com/scientificreports OPEN Geometrical vortex lattice pinning and melting in YBaCuO submicron bridges Received: 10 August 2016 G. P. Papari1,*, A. Glatz2,3,*, F. Carillo4, D. Stornaiuolo1,5, D. Massarotti5,6, V. Rouco1, Accepted: 11 November 2016 L. Longobardi6,7, F. Beltram2, V. M. Vinokur2 & F. Tafuri5,6 Published: 23 December 2016 Since the discovery of high-temperature superconductors (HTSs), most efforts of researchers have been focused on the fabrication of superconducting devices capable of immobilizing vortices, hence of operating at enhanced temperatures and magnetic fields. Recent findings that geometric restrictions may induce self-arresting hypervortices recovering the dissipation-free state at high fields and temperatures made superconducting strips a mainstream of superconductivity studies. Here we report on the geometrical melting of the vortex lattice in a wide YBCO submicron bridge preceded by magnetoresistance (MR) oscillations fingerprinting the underlying regular vortex structure. Combined magnetoresistance measurements and numerical simulations unambiguously relate the resistance oscillations to the penetration of vortex rows with intermediate geometrical pinning and uncover the details of geometrical melting. Our findings offer a reliable and reproducible pathway for controlling vortices in geometrically restricted nanodevices and introduce a novel technique of geometrical spectroscopy, inferring detailed information of the structure of the vortex system through a combined use of MR curves and large-scale simulations. Superconductors are materials in which below the superconducting transition temperature, Tc, electrons form so-called Cooper pairs, which are bosons, hence occupying the same lowest quantum state1. The wave function of this Cooper condensate has a fixed phase. Hence, by virtue of the uncertainty principle, the number of Cooper pairs in the condensate is undefined. -
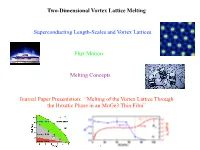
Two-Dimensional Vortex Lattice Melting Superconducting Length
Two-Dimensional Vortex Lattice Melting Superconducting Length-Scales and Vortex Lattices Flux Motion Melting Concepts Journal Paper Presentation: “Melting of the Vortex Lattice Through the Hexatic Phase in an MoGe3 Thin Film” 1 Repulsive Interaction Between Vortices Vortex Lattice 2 Vortex Melting in Superconducting Nb 3 (For 3D clean Type II superconductor) Vortex Lattice Expands on Freezing (Like Ice) Jump in the Magnetization 4 Melting Concepts 3D Solid Liquid Lindemann Criterion (∆r)2 ↵a 1st Order Transition ⇡ p 5 6 Journal Presentation Motivation/Context Results Interpretation Questions/Ideas for Future Work (aim for 30-45 mins) Please check the course site about the presentation schedule No class on The April 8, 15 Make-Ups on Ms April 12, 19 (Weekly Discussion to be Rescheduled) 7 First Definitive Observation of the Hexatic Phase in a Superconducting Film (with 8 thanks to Indranil Roy and Pratap Raychaudhuri) Two Dimensional Melting (BKT + HNY theory) 9 10 Hexatics have been observed in 2D colloidal systems Why not in the Melting of the Vortex Phase of Superconducting Films ?? 11 Quest for the Hexatic Liquid Phase in ↵ MoGe − Why Not Before ?? Orientational Coupling Hexatic Glass !! between Atomic and Vortex Lattices Solution: Amorphous Superconductor (no lattice effect) Very Weak Pinning BCS-Type Superconductor 12 Scanning Tunneling Spectroscopy (STS) Magnetotransport 13 14 15 16 17 The Resulting Phase Diagram 18 Summary First Observation of Hexatic Fluid Phase in a 2D Superconducting Film Pinning Significantly Weaker than in Previous Studies STS (imaging) Magnetotransport (“shear”) Questions/Ideas for the Future Size-Dependence of Hexatic Order Parameter ?? Low T limit of the Hexatic Fluid: Quantum Vortex Fluid ?? What happens in Layered Films ?? 19 20. -

Sodium Spinor Bose-Einstein Condensates
SODIUM SPINOR BOSE-EINSTEIN CONDENSATES: ALL-OPTICAL PRODUCTION AND SPIN DYNAMICS By JIEJIANG BachelorofScienceinOpticalInformationScience UniversityofShanghaiforScienceandTechnology Shanghai,China 2009 SubmittedtotheFacultyofthe GraduateCollegeof OklahomaStateUniversity inpartialfulfillmentof therequirementsfor theDegreeof DOCTOROFPHILOSOPHY December,2015 COPYRIGHT c By JIE JIANG December, 2015 SODIUM SPINOR BOSE-EINSTEIN CONDENSATES: ALL-OPTICAL PRODUCTION AND SPIN DYNAMICS Dissertation Approved: Dr. Yingmei Liu Dissertation Advisor Dr. Albert T. Rosenberger Dr. Gil Summy Dr. Weili Zhang iii ACKNOWLEDGMENTS I would like to first express my sincere gratitude to my thesis advisor Dr. Yingmei Liu, who introduced ultracold quantum gases to me and guided me throughout my PhD study. I am greatly impressed by her profound knowledge, persistent enthusiasm and love in BEC research. It has been a truly rewarding and privilege experience to perform my PhD study under her guidance. I also want to thank my committee members, Dr. Albert Rosenberger, Dr. Gil Summy, and Dr. Weili Zhang for their advice and support during my PhD study. I thank Dr. Rosenberger for the knowledge in lasers and laser spectroscopy I learnt from him. I thank Dr. Summy for his support in the department and the academic exchange with his lab. Dr. Zhang offered me a unique opportunity to perform microfabrication in a cleanroom, which greatly extended my research experience. During my more than six years study at OSU, I had opportunities to work with many wonderful people and the team members in Liu’s lab have been providing endless help for me which is important to my work. Many thanks extend to my current colleagues Lichao Zhao, Tao Tang, Zihe Chen, and Micah Webb as well as our former members Zongkai Tian, Jared Austin, and Alex Behlen. -

Melting of Lamellar Phases in Temperature Sensitive Colloid-Polymer Suspensions
PHYSICAL REVIEW LETTERS week ending VOLUME 93, NUMBER 5 30 JULY 2004 Melting of Lamellar Phases in Temperature Sensitive Colloid-Polymer Suspensions A. M. Alsayed, Z. Dogic, and A. G. Yodh Department of Physics and Astronomy, University of Pennsylvania, Philadelphia, Pennsylvania 19104-6396, USA (Received 10 March 2004; published 29 July 2004) We prepare a novel suspension composed of rodlike fd virus and thermosensitive polymer poly(N-isopropylacrylamide) whose phase diagram is temperature and concentration dependent. The system exhibits a rich variety of stable and metastable phases, and provides a unique opportunity to directly observe melting of lamellar phases and single lamellae. Typically, lamellar phases swell with increasing temperature before melting into the nematic phase. The highly swollen lamellae can be superheated as a result of topological nucleation barriers that slow the formation of the nematic phase. DOI: 10.1103/PhysRevLett.93.057801 PACS numbers: 64.70.Md, 61.30.–v, 64.60.My Melting of three-dimensional (3D) crystals is among lamellar phases and coexisting isotropic or nematic the most ubiquitous phase transitions in nature [1]. In phases. contrast to freezing, melting of 3D crystals usually has The fd=NIPA solutions are unusual new materials no associated energy barrier. Bulk melting is initiated at a whose lamellar phases differ from those of amphiphilic premelted surface, which then acts as a heterogeneous molecules. The lamellar phase can swell considerably and nucleation site and eliminates the nucleation barrier for melt into a nematic phase, a transition almost never the phase transition [2]. In this Letter, we investigate observed in block-copolymer lamellar systems. -

Physical Changes
How Matter Changes By Cindy Grigg Changes in matter happen around you every day. Some changes make matter look different. Other changes make one kind of matter become another kind of matter. When you scrunch a sheet of paper up into a ball, it is still paper. It only changed shape. You can cut a large, rectangular piece of paper into many small triangles. It changed shape and size, but it is still paper. These kinds of changes are called physical changes. Physical changes are changes in the way matter looks. Changes in size and shape, like the changes in the cut pieces of paper, are physical changes. Physical changes are changes in the size, shape, state, or appearance of matter. Another kind of physical change happens when matter changes from one state to another state. When water freezes and makes ice, it is still water. It has only changed its state of matter from a liquid to a solid. It has changed its appearance and shape, but it is still water. You can change the ice back into water by letting it melt. Matter looks different when it changes states, but it stays the same kind of matter. Solids like ice can change into liquids. Heat speeds up the moving particles in ice. The particles move apart. Heat melts ice and changes it to liquid water. Metals can be changed from a solid to a liquid state also. Metals must be heated to a high temperature to melt. Melting is changing from a solid state to a liquid state. -

Chapter 10: Melting Point
Chapter 10: Melting Point The melting point of a compound is the temperature or the range of temperature at which it melts. For an organic compound, the melting point is well defined and used both to identify and to assess the purity of a solid compound. 10.1 Compound Identification An organic compound’s melting point is one of several physical properties by which it is identified. A physical property is a property that is intrinsic to a compound when it is pure, such as its color, boiling point, density, refractive index, optical rotation, and spectra (IR, NMR, UV-VIS, and MS). A chemist must measure several physical properties of a compound to determine its identity. Since melting points are relatively easy and inexpensive to determine, they are handy identification tools to the organic chemist. The graph in Figure 10-1 illustrates the ideal melting behavior of a solid compound. At a temperature below the melting point, only solid is present. As heat is applied, the temperature of the solid initially rises and the intermolecular vibrations in the crystal increase. When the melting point is reached, additional heat input goes into separating molecules from the crystal rather than raising the temperature of the solid: the temperature remains constant with heat input at the melting point. When all of the solid has been changed to liquid, heat input raises the temperature of the liquid and molecular motion within the liquid increases. Figure 10-1: Melting behavior of solid compounds. Because the temperature of the solid remains constant with heat input at the transition between solid and liquid phases, the observer sees a sharp melting point. -
Melting Point
Melting Point by Quan Ho, Athena Tsai, Braden Taylor, Devank Shekhar, Mary Petrino, Luc Sturbelle Definition The temperature at which a solid turns into a liquid. ● Substances enter their phase of equilibrium when they are melting. ● Usually, melting point = freezing point How melting occurs As energy is added in the form of heat, the kinetic energy of the particles increases. The vibrations of the particles become more and more violent until the solid finally begins to break apart or melt. Notes: Even though particles of a solid are packed very closely together in definite structure by their attraction force, these particles do move back and forth and up and down, or vibrate around a fixed point. Chemical Equilibrium A dynamic state in which the rate of the forward reaction equals the rate of the reverse reaction. Chemical Equilibrium (continued) The solid line between points B and D contains the combinations of temperature and pressure at which the solid and liquid are in equilibrium. At every point along this line, the solid melts at the same rate at which the liquid freezes. Facts about melting point of substances ● Pure, crystalline solids melt over a very narrow range of temperatures. ● Mixtures melt over a broad temperature range. Mixtures also tend to melt at temperatures below the melting points of the pure solids. ● An increase of pressure make it easier for the substance to melt, and therefore lowers the melting point. ● The greater the attraction between the particles of a solid, the higher the melting point. Temperature and energy ● Only after the solid is completely melted will the temperature of the substance again begin to rise as additional heat energy is added. -

Direct Observation of Melting in a 2-D Superconducting Vortex Lattice
Direct observation of melting in a 2-D superconducting vortex lattice I. Guillamon,´ 1¤ H. Suderow,1 A. Fernandez-Pacheco,´ 2;3;4 J. Sese,´ 2;4 R. Cordoba,´ 2;4 J.M. De Teresa,3;4 M. R. Ibarra,2;3;4 S. Vieira 1 1Laboratorio de Bajas Temperaturas, Departamento de F´ısica de la Materia Condensada, Insti- tuto de Ciencia de Materiales Nicolas´ Cabrera, Facultad de Ciencias, Universidad Autonoma´ de Madrid, E-28049 Madrid, Spain 2Instituto de Nanociencia de Aragon,´ Universidad de Zaragoza, Zaragoza, 50009, Spain 3Instituto de Ciencia de Materiales de Aragon,´ Universidad de Zaragoza-CSIC, Facultad de Cien- cias, Zaragoza, 50009, Spain 4Departamento de F´ısica de la Materia Condensada, Universidad de Zaragoza, 50009 Zaragoza, Spain Topological defects such as dislocations and disclinations are predicted to determine the two- dimensional (2-D) melting transition1–3. In 2-D superconducting vortex lattices, macroscopic measurements evidence melting close to the transition to the normal state. However, the di- rect observation at the scale of individual vortices of the melting sequence has never been performed. Here we provide step by step imaging through scanning tunneling spectroscopy of a 2-D system of vortices up to the melting transition in a focused-ion-beam nanodeposited W-based superconducting thin film. We show directly the transition into an isotropic liq- uid below the superconducting critical temperature. Before that, we find a hexatic phase, 1 characterized by the appearance of free dislocations, and a smectic-like phase, possibly orig- inated through partial disclination unbinding. These results represent a significant step in the understanding of melting of 2-D systems, with impact across several research fields, such as liquid crystal molecules, or lipids in membranes 4–7. -

Theory of Vortex-Lattice Melting
Chapter 7 Theory of vortex-lattice melting Abstract We investigate quantum and temperature fluctuations of a vortex lattice in a one-dimensional optical lattice. We discuss in particular the Bloch bands of the Tkachenko modes and calculate the correlation function of the vor- tex positions along the direction of the optical lattice. Because of the small number of particles in the pancake Bose-Einstein condensates at every site of the optical lattice, finite-size effects become very important. Moreover, the fluctuations in the vortex positions are inhomogeneous due to the inhomoge- neous density. As a result, the melting of the lattice occurs from the outside inwards. However, tunneling between neighboring pancakes substantially re- duces the inhomogeneity as well as the size of the fluctuations. On the other hand, nonzero temperatures increase the size of the fluctuations dramatically. We calculate the crossover temperature from quantum melting to classical melting. We also investigate melting in the presence of a quartic radial poten- tial, where a liquid can form in the center instead of at the outer edge of the pancake Bose-Einstein condensates. This chapter is based on “Theory of vortex-lattice melting in a one-dimensional optical lattice”, M. Snoek, and H. T. C. Stoof, submitted to Physical Review A. 79 Chapter 7. Theory of vortex-lattice melting 7.1 Introduction Since the onset of experiments on Bose-Einstein condensates, vortices have at- tracted a lot of attention. When the Bose-Einstein condensate is rotated faster than some critical rotation frequency Ωc, a vortex appears in the gas [6, 7, 8]. -

The Particle Model of Matter 5.1
The Particle Model of Matter 5.1 More than 2000 years ago in Greece, a philosopher named Democritus suggested that matter is made up of tiny particles too small to be seen. He thought that if you kept cutting a substance into smaller and smaller pieces, you would eventually come to the smallest possible particles—the building blocks of matter. Many years later, scientists came back to Democritus’ idea and added to it. The theory they developed is called the particle model of matter. LEARNING TIP There are four main ideas in the particle model: Are you able to explain the 1. All matter is made up of tiny particles. particle model of matter in your own words? If not, re-read the main ideas and examine the illustration that goes with each. 2. The particles of matter are always moving. 3. The particles have spaces between them. 4. Adding heat to matter makes the particles move faster. heat Scientists find the particle model useful for two reasons. First, it provides a reasonable explanation for the behaviour of matter. Second, it presents a very important idea—the particles of matter are always moving. Matter that seems perfectly motionless is not motionless at all. The air you breathe, your books, your desk, and even your body all consist of particles that are in constant motion. Thus, the particle model can be used to explain the properties of solids, liquids, and gases. It can also be used to explain what happens in changes of state (Figure 1 on the next page). NEL 5.1 The Particle Model of Matter 117 The particles in a solid are held together strongly. -
Lecture #4, Commercial Glass Melting and Associated Air Emission Issues C
RECEIVED n c w WHC-MR-0489 MAR 09 1995 OSTI Glass Science Tutorial: Lecture #4, Commercial Glass Melting and Associated Air Emission Issues C. Philip Ross, Lecturer A. A. Kruger Date Published January 1995 Prepared for the U.S. Department of Energy Office of Environmental Restoration and .Waste Management (w) Westinghouse ^-^ Hanford Company Richland, Washington Hanford Operations and Engineering Contractor for the U.S. Department of Energy under Contract DE-AC06-87RL10930 - -, ... <> -.njvCN"! IS UHu'WiTED DISTRIBUTION Ob t><- - - Approved for Public Release LEGAL DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, nor any of their contractors, subcontractors or their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or any third party's use or the results of such use of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise, does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof or its contractors or subcontractors. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. This report has been reproduced from the best available copy. Available in paper copy and microfiche. Available to the U.S.