C01 Plus 2010 301 185 0 Fr
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
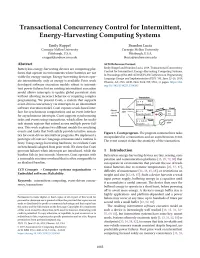
Transactional Concurrency Control for Intermittent, Energy-Harvesting Computing Systems
PLDI ’19, June 22ś26, 2019, Phoenix, AZ, USA Emily Ruppel and Brandon Lucia 52, 55, 82] and preserving progress [6, 7, 53]. Recent work sequences of multiple tasks to execute atomically with re- addressed input/output (I/O), ensuring that computations spect to events. Coati’s support for events and transactions were timely in their consumption of data collected from sen- is the main contribution of this work. Coati provides the sors [15, 31, 86]. However, no prior work on intermittent critical ability to ensure correct synchronization across re- computing provides clear semantics for programs that use gions of code that are too large to complete in a single power event-driven concurrency, handling asynchronous I/O events cycle. Figure 1 shows a Coati program with three tasks con- in interrupts that share state with transactional computa- tained in a transaction manipulating related variables x, y, tions that execute in a main control loop. The idiomatic use of and z, while an asynchronous event updates x and y. Coati interrupts to collect, process, and store sensor results is very ensures atomicity of all tasks in the figure, even if any task common in embedded systems. The absence of this event- individually is forced to restart by a power failure. driven I/O support in intermittent systems is an impediment This work explores the design space of transaction, task, to developing batteryless, energy-harvesting applications. and event implementations by examining two models that Combining interrupts and transactional computations in make different trade-offs between complexity and latency. an intermittent system creates a number of unique problems Coati employs a split-phase model that handles time-critical that we address in this work using new system support. -

Beyond Interoperability – Pushing the Performance of Sensor Network IP Stacks
Industry: Beyond Interoperability – Pushing the Performance of Sensor Network IP Stacks JeongGil Ko Joakim Eriksson Nicolas Tsiftes Department of Computer Science Swedish Institute of Computer Swedish Institute of Computer Johns Hopkins University Science (SICS) Science (SICS) Baltimore, MD 21218, USA Box 1263, SE-16429 Kista, Box 1263, SE-16429 Kista, [email protected] Sweden Sweden [email protected] [email protected] Stephen Dawson-Haggerty Jean-Philippe Vasseur Mathilde Durvy Computer Science Division Cisco Systems Cisco Systems University of California, Berkeley 11, Rue Camille Desmoulins, Issy 11, Rue Camille Desmoulins, Issy Berkeley, CA 94720, USA Les Moulineaux, 92782, France Les Moulineaux, 92782, France [email protected] [email protected] [email protected] Abstract General Terms Interoperability is essential for the commercial adoption Experimentation, Performance, Standardization of wireless sensor networks. However, existing sensor net- Keywords work architectures have been developed in isolation and thus IPv6, 6LoWPAN, RPL, IETF, Interoperability, Sensor interoperability has not been a concern. Recently, IP has Network, TinyOS, Contiki been proposed as a solution to the interoperability problem of low-power and lossy networks (LLNs), considering its open 1 Introduction and standards-based architecture at the network, transport, For wireless sensor networks to be widely adopted by and application layers. We present two complete and in- the industry, hardware and software implementations from teroperable implementations of the IPv6 protocol stack for different vendors need to interoperate and perform well to- LLNs, one for Contiki and one for TinyOS, and show that gether. While IEEE 802.15.4 has emerged as a common the cost of interoperability is low: their performance and physical layer that is used both in commercial sensor net- overhead is on par with state-of-the-art protocol stacks cus- works and in academic research, interoperability at the phys- tom built for the two platforms. -

Coap Based Acute Parking Lot Monitoring System Using Sensor Networks
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Directory of Open Access Journals ISSN: 2229-6948(ONLINE) ICTACT JOURNAL ON COMMUNICATION TECHNOLOGY: SPECIAL ISSUE ON ADVANCES IN WIRELESS SENSOR NETWORKS, JUNE 2014, VOLUME: 05, ISSUE: 02 COAP BASED ACUTE PARKING LOT MONITORING SYSTEM USING SENSOR NETWORKS R. Aarthi1 and A. Pravin Renold2 TIFAC-CORE in Pervasive Computing Technologies, Velammal Engineering College, India E-mail: [email protected], [email protected] Abstract it to aid in overall management and planning. Sensor networks Vehicle parking is the act of temporarily maneuvering a vehicle in to are a natural candidate for car-park management systems [6], a certain location. To deal with parking monitoring system issue such because they allow status to be monitored very accurately - for as traffic, this paper proposes a vision of improvements in monitoring each parking space, if desired. the vehicles in parking lots based on sensor networks. Most of the existing paper deals with that of the automated parking which is of cluster based and each has its own overheads like high power, less energy efficiency, incompatible size of lots, space. The novel idea in this work is usage of CoAP (Constrained Application Protocol) which is recently created by IETF (draft-ietf-core-coap-18, June 28, 2013), CoRE group to develop RESTful application layer protocol for communications within embedded wireless networks. This paper deals with the enhanced CoAP protocol using multi hop flat topology, which makes the acuters feel soothe towards parking vehicles. We aim to minimize the time consumed for finding free parking lot as well as increase the energy efficiency. -

Tecnologías De Fuentes Abiertas Para Ciudades Inteligentes
Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes www.cenatic.es Abril 2013 Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes Título: Open Smart Cities: Tecnologías de fuentes abiertas para ciudades inteligentes Autora: Ana Trejo Pulido Abril 2012 Edita: CENATIC. Avda. Clara Campoamor s/n. 06200 Almendralejo (Badajoz). Primera Edición. ISBN-13: 978-84-15927-13-6 Los contenidos de esta obra está bajo una licencia Reconocimiento 3.0 España de Creative Commons. Para ver una copia de la licencia visite http://creativecommons.org/licenses/by/3.0/es/ www.cenatic.es Pág. 2 de 59 Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes Índice 1 Introducción...............................................................................................................6 2 La Internet de las Cosas: hacia la ciudad conectada.................................................7 3 Tecnologías de código abierto para la Internet de las Cosas.....................................9 3.1 Waspmote.................................................................................................................10 3.2 Arduino......................................................................................................................10 3.3 Dash7........................................................................................................................11 3.4 Rasberry Pi................................................................................................................11 -

A Fog Storage Software Architecture for the Internet of Things Bastien Confais, Adrien Lebre, Benoît Parrein
A Fog storage software architecture for the Internet of Things Bastien Confais, Adrien Lebre, Benoît Parrein To cite this version: Bastien Confais, Adrien Lebre, Benoît Parrein. A Fog storage software architecture for the Internet of Things. Advances in Edge Computing: Massive Parallel Processing and Applications, IOS Press, pp.61-105, 2020, Advances in Parallel Computing, 978-1-64368-062-0. 10.3233/APC200004. hal- 02496105 HAL Id: hal-02496105 https://hal.archives-ouvertes.fr/hal-02496105 Submitted on 2 Mar 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. November 2019 A Fog storage software architecture for the Internet of Things Bastien CONFAIS a Adrien LEBRE b and Benoˆıt PARREIN c;1 a CNRS, LS2N, Polytech Nantes, rue Christian Pauc, Nantes, France b Institut Mines Telecom Atlantique, LS2N/Inria, 4 Rue Alfred Kastler, Nantes, France c Universite´ de Nantes, LS2N, Polytech Nantes, Nantes, France Abstract. The last prevision of the european Think Tank IDATE Digiworld esti- mates to 35 billion of connected devices in 2030 over the world just for the con- sumer market. This deep wave will be accompanied by a deluge of data, applica- tions and services. -

NSF Nets Small RUI: Wireless Sensor Network Project
NSF NeTs Small RUI: Wireless Sensor Network Project Federal Agency and Organization Element to Which Report is Submitted: 4900 Federal Grant or Other Identifying Number Assigned by Agency: 1816197 Project Title: NeTS: Small: RUI: Bulldog Mote- Low Power Sensor Node and design Methodologies for Wireless Sensor Networks PD/PI Name: Nan Wang, Principal Investigator Woonki Na, Co-Principal Investigator Recipient Organization: California State University-Fresno Foundation Project/Grant Period: 10/01/2018 - 09/30/2021 Reporting Period: 10/01/2018 - 09/30/2019 Student Assistant: Russel Schellenberg Calvin Jarrod Smith Department of Electrical and Computer Engineering Lyles College of Engineering Contents 1 Purpose 3 2 Current Projects 3 2.1 Bulldog Mote . .3 2.2 Wireless Gateway Implementation . .3 2.2.1 Tmote Sky Mote . .3 2.2.2 Gateway Website . .7 2.3 MANET Routing Protocols and Software . .8 2.3.1 Contiki OS . .8 3 HM-10 BLE Communication Module 10 3.1 Overview . 10 3.2 HM-10 Module Configuration . 16 3.3 Connecting Two HM-10 Devices . 17 3.3.1 Setting up Slave Device . 18 3.3.2 Setting up Master Device . 18 3.3.3 Discovery Connection . 19 3.4 Connecting to HM-10 from Android Phone . 23 4 Wireless Gateway Implementation 30 4.1 Gateway Operating System and Environment . 30 4.2 Required hardware: . 30 4.3 Installation . 30 4.4 Contiki Program . 31 4.5 Gateway Program . 32 4.6 Web Server . 32 5 One-Hop, Ad-Hoc Sensor Network with Cooja 36 5.1 Overview . 36 5.2 Peripheral Node Gateway Detection . -

Design of a Distributed System for Information Processing in a Mist-Edge-Cloud Environment Moisés Carral Ortiz
Design of a Distributed System for Information Processing in a Mist-Edge-Cloud Environment Moisés Carral Ortiz Master’s Thesis presented to the Telecommunications Engineering School Master’s Degree in Telecommunications Engineering Supervisors Felipe José Gil Castiñeira Juan José López Escobar 2020 - 2021 Acknowledgements I would like to express my gratitude to my tutor, Felipe Gil, who has allowed me to discover the unknown world of research and has supported me both professionally and personally to make this thesis what it is. Also I would like to consider the good working environment created by my co-workers in GTI researh group. Finally, thanks to my virtuous and tireless master’s degree teammates. Vigo, July 20, 2021 iii Abstract The exponential growth of connected devices as well as massive data generation are challenging well-established technologies such as Cloud Computing. The Big Data paradigm for inferring knowledge and predicting results supports the sensorisation of environments in all areas (social, business, environmental, etc.) to obtain more information for the training of artificial intelligences or machine learning models. The need for low latency and high throughput applications in sensor networks is driving the emergence of new computational paradigms and network architectures. Real-time systems in which decision-making is critical, such as autonomous driving or the management of automated processes by robots in Industry 4.0, cannot adapt their needs to Cloud Computing. Other paradigms such as Mist Computing or Fog Computing are emerging in response to these needs to evolve actual computing architectures. This paper introduces some of the proposals that, in contrast to the classical structure of centralised data processing in the Cloud, advocate for a distributed architecture that brings the IoT-Edge-Cloud Continuum. -

Building a Testbed for the Internet of Things
ALEXANDER TECHNOLOGICAL INSTITUTE OF THESSALONIKI School of Technological Applications Department of Computer Science Engineering Bachelor of Science Thesis Building a Testbed for the Internet of Things Thesis Supervisor : Dr. Jesus Alonso Zarate Author: Vasileios Karagiannis Head of M2M Department Registration Number: 07/3273 CTTC, Barcelona, Spain Thesis Advisor : MSc Francisco Vazquez Gallego Senior Researcher CTTC, Barcelona, Spain Academic Supervisor : Dr. Periklis Chatzimisios Associate Professor ATEI, Thessaloniki, Greece Barcelona, April 2014 Abstract Over the past few years a technological outbreak has been noticed in the area of electronics and computer networks, granting eligibility to connect these fields in the direction of building intelligent systems. These systems have the ability to increase the growth of information and communication technologies (ICT) in urban environments and to provide services able to significantly upgrade the general well-being of individuals and societies. The whole concept of an Internet of Things (IoT) is reviewed in this thesis, architectures are discussed and some notable commercial solutions are presented. Continuously we build our own development platform by setting up a wireless network of sub-GHz devices and connecting it to a virtual Internet cloud. Moreover, software applications are designed to complete an End-to-End Machine to Machine (M2M) communication network and therefore, emulate an entire Internet of Things environment. The communication framework that is developed, allows us to research a variety of IoT concepts including the upcoming smart grid which is a significant improvement to the current electric power distribution system. Keywords: Internet of Things, M2M Communications, M2M Cloud Platforms, Wireless Networks, Testbed, Gateway Engineering, Android programming, Electric Power Grid, Smart Grid. -
Middleware Development for Iot Networks
POLITECNICO DI TORINO Facoltà di Ingegneria Laurea Magistrale in Ingegneria Informatica Tesi di Laurea Magistrale Middleware development for IoT networks Relatori: Prof. Ing. Marina Mondin Prof. Ing. Roberto Garello Candidato: Marco Luciano Forestello Anno accademico 2017-2018 Acknowledgements I would like to express my sincere gratitude to my supervisors in CSULA, Marina Mondin and Fred Daneshgaran for their hospitality and their continuous support even across the ocean. The same goes for Roberto Garello, who was always available to give me a hand since my return to Turin. They offered me a possibility to nourish my passion for IoT. I owe special thanks to my friends, whether in Italy in Argentina or in the USA, they have always been present during my university days making it an unforgettable experience. Lastly, I would like to thank my family, for their unwavering support through the years, even in the darkest hours and until the last seconds. ii Contents Acknowledgements ii 1 Introduction 1 1.1 The project................................2 2 The Internet of Things 3 2.1 Internet of Things.............................3 2.2 IoT Architecture.............................3 2.2.1 Level 1: Devices and Controllers.................4 2.2.2 Level 2: Connectivity.......................4 2.2.3 Level 3: Edge (Fog) Computing.................4 2.2.4 Level 4: Data Accumulation...................5 2.2.5 Level 5: Data Abstraction....................5 2.2.6 Level 6: Application.......................5 2.2.7 Level 7: Collaboration and Processes..............5 -

The Contikimac Radio Duty Cycling Protocol
The ContikiMAC Radio Duty Cycling Protocol Adam Dunkels [email protected] SICS Technical Report T2011:13 ISSN 1100-3154 December 2011 Abstract posed (see e.g. Dutta and Dunkels for a more thorough review of duty cycling mechanisms [9]). This document Low-power wireless devices must keep their radio describes the ContikiMAC duty cycling mechanism, the transceivers off as much as possible to reach a low power default duty cycling mechanism in Contiki 2.5 consumption, but must wake up often enough to be able to ContikiMAC is designed to be simple to understand receive communication from their neighbors. This report and implement. ContikiMAC uses only asynchronous describes the ContikiMAC radio duty cycling mechanism, mechanisms, no signaling messages, and no additional the default radio duty cycling mechanism in Contiki 2.5, packet headers. ContikiMAC packets are ordinary link which uses a power efficient wake-up mechanism with layer messages. ContikiMAC has a significantly more a set of timing constraints to allow device to keep their power-efficient wake-up mechanism that previous duty transceivers off. With ContikiMAC, nodes can participate cycling mechanisms. This is achieved by precise timing in network communication yet keep their radios turned through a set of timing constraints. In addition, Contiki- off for roughly 99% of the time. This report describes the MAC uses a fast sleep optimization, to allow receivers to ContikiMAC mechanism, measures the energy consump- quickly detect false-positive wake-ups, and a transmission tion of individual ContikiMAC operations, and evaluates phase-lock optimization, to allow run-time optimization the efficiency of the fast sleep and phase-lock optimiza- of the energy-efficiency of transmissions. -

Building a Testbed for the Internet of Things
ALEXANDER TECHNOLOGICAL INSTITUTE OF THESSALONIKI School of Technological Applications Department of Computer Science Engineers Bachelor of Science Thesis Building a Testbed for the Internet of Things Thesis Supervisor : Dr. Jesus Alonso Zarate Author: Vasileios Karagiannis Head of M2M Department : Registration Number 07/3273 CTTC, Barcelona, Spain Thesis Advisor : MSc Francisco Vazquez Gallego Senior Researcher CTTC, Barcelona, Spain Academic Supervisor : Dr. Periklis Chatzimisios Associate Professor ATEITHE, Thessaloniki, Greece Barcelona, April 2014 Abstract Over the past few years a technological outbreak has been noticed in the area of electronics and computer networks, granting eligibility to connect these fields in the direction of building intelligent systems. These systems have the ability to increase the growth of Information and Communication Technologies (ICT) in urban environments and to provide services able to significantly upgrade the general well-being of individuals and societies. The whole concept of an Internet of Things (IoT) is reviewed in this thesis, architectures are discussed and some notable commercial solutions are presented. We then build our own development platform by setting up a wireless network of sub-GHz devices and connecting it to a virtual Internet cloud. Moreover, software applications are designed to complete an End-to-End Machine to Machine (M2M) communication network and therefore, emulate an entire Internet of Things environment. The communication framework that is developed, allows us to research a variety of IoT concepts including the upcoming smart grid which is a significant improvement to the current electric power distribution system. Keywords: Internet of Things, M2M Communications, IoT Cloud Platforms, Wireless Networks, Testbed, Gateway Engineering, Android programming, Electric Power Grid, Smart Grid. -

Iot) an Evolution
Chaitanya Mankar et al, International Journal of Computer Science and Mobile Computing, Vol.5 Issue.3, March- 2016, pg. 772-775 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320–088X IMPACT FACTOR: 5.258 IJCSMC, Vol. 5, Issue. 3, March 2016, pg.772 – 775 Internet of Things (IoT) an Evolution Mr. Chaitanya Mankar Computer Department, Alard College of Engineering & Management, Pune [email protected] Mr. Himanshu Mankar Computer Department, Alard College of Engineering & Management, Pune [email protected] Mr. Amit Katale Computer Department, Alard College of Engineering & Management, Pune [email protected] Mr. Paresh Jain Computer Department, Alard College of Engineering & Management, Pune [email protected] ABSTRACT: This paper shows Internet of Things in a varied environment. Core empowering feature of this idea is the combination of different technologies. In this paper, it describes the crucial technologies evolved and involved in the execution of Web of Things and the main application area where the Internet of Things will make an important role. This paper discusses about the uncluttered matters that are to be represented before the worldwide reception of these technologies including CoAP, TinyOS . There are tons of open matters to discourse. Here it addresses the most appropriate amongst them in detail. General Terms Internet of Things Keywords TinyOS, CoAP, Ubiquitous Computsing, Contiki, RESTful services 1. INTRODUCTION The term (IoT) Internet of Things has been in trend for somewhat a few years. In this situation, it is achieving ground with the development of advanced wireless technology.