A Fog Storage Software Architecture for the Internet of Things Bastien Confais, Adrien Lebre, Benoît Parrein
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Transactional Concurrency Control for Intermittent, Energy-Harvesting Computing Systems
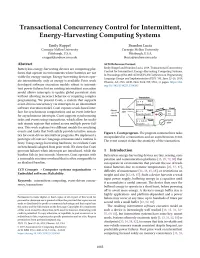
PLDI ’19, June 22ś26, 2019, Phoenix, AZ, USA Emily Ruppel and Brandon Lucia 52, 55, 82] and preserving progress [6, 7, 53]. Recent work sequences of multiple tasks to execute atomically with re- addressed input/output (I/O), ensuring that computations spect to events. Coati’s support for events and transactions were timely in their consumption of data collected from sen- is the main contribution of this work. Coati provides the sors [15, 31, 86]. However, no prior work on intermittent critical ability to ensure correct synchronization across re- computing provides clear semantics for programs that use gions of code that are too large to complete in a single power event-driven concurrency, handling asynchronous I/O events cycle. Figure 1 shows a Coati program with three tasks con- in interrupts that share state with transactional computa- tained in a transaction manipulating related variables x, y, tions that execute in a main control loop. The idiomatic use of and z, while an asynchronous event updates x and y. Coati interrupts to collect, process, and store sensor results is very ensures atomicity of all tasks in the figure, even if any task common in embedded systems. The absence of this event- individually is forced to restart by a power failure. driven I/O support in intermittent systems is an impediment This work explores the design space of transaction, task, to developing batteryless, energy-harvesting applications. and event implementations by examining two models that Combining interrupts and transactional computations in make different trade-offs between complexity and latency. an intermittent system creates a number of unique problems Coati employs a split-phase model that handles time-critical that we address in this work using new system support. -

Beyond Interoperability – Pushing the Performance of Sensor Network IP Stacks
Industry: Beyond Interoperability – Pushing the Performance of Sensor Network IP Stacks JeongGil Ko Joakim Eriksson Nicolas Tsiftes Department of Computer Science Swedish Institute of Computer Swedish Institute of Computer Johns Hopkins University Science (SICS) Science (SICS) Baltimore, MD 21218, USA Box 1263, SE-16429 Kista, Box 1263, SE-16429 Kista, [email protected] Sweden Sweden [email protected] [email protected] Stephen Dawson-Haggerty Jean-Philippe Vasseur Mathilde Durvy Computer Science Division Cisco Systems Cisco Systems University of California, Berkeley 11, Rue Camille Desmoulins, Issy 11, Rue Camille Desmoulins, Issy Berkeley, CA 94720, USA Les Moulineaux, 92782, France Les Moulineaux, 92782, France [email protected] [email protected] [email protected] Abstract General Terms Interoperability is essential for the commercial adoption Experimentation, Performance, Standardization of wireless sensor networks. However, existing sensor net- Keywords work architectures have been developed in isolation and thus IPv6, 6LoWPAN, RPL, IETF, Interoperability, Sensor interoperability has not been a concern. Recently, IP has Network, TinyOS, Contiki been proposed as a solution to the interoperability problem of low-power and lossy networks (LLNs), considering its open 1 Introduction and standards-based architecture at the network, transport, For wireless sensor networks to be widely adopted by and application layers. We present two complete and in- the industry, hardware and software implementations from teroperable implementations of the IPv6 protocol stack for different vendors need to interoperate and perform well to- LLNs, one for Contiki and one for TinyOS, and show that gether. While IEEE 802.15.4 has emerged as a common the cost of interoperability is low: their performance and physical layer that is used both in commercial sensor net- overhead is on par with state-of-the-art protocol stacks cus- works and in academic research, interoperability at the phys- tom built for the two platforms. -
Compsci 514: Computer Networks Lecture 13: Distributed Hash Table
CompSci 514: Computer Networks Lecture 13: Distributed Hash Table Xiaowei Yang Overview • What problems do DHTs solve? • How are DHTs implemented? Background • A hash table is a data structure that stores (key, object) pairs. • Key is mapped to a table index via a hash function for fast lookup. • Content distribution networks – Given an URL, returns the object Example of a Hash table: a web cache http://www.cnn.com0 Page content http://www.nytimes.com ……. 1 http://www.slashdot.org ….. … 2 … … … • Client requests http://www.cnn.com • Web cache returns the page content located at the 1st entry of the table. DHT: why? • If the number of objects is large, it is impossible for any single node to store it. • Solution: distributed hash tables. – Split one large hash table into smaller tables and distribute them to multiple nodes DHT K V K V K V K V A content distribution network • A single provider that manages multiple replicas. • A client obtains content from a close replica. Basic function of DHT • DHT is a virtual hash table – Input: a key – Output: a data item • Data Items are stored by a network of nodes. • DHT abstraction – Input: a key – Output: the node that stores the key • Applications handle key and data item association. DHT: a visual example K V K V (K1, V1) K V K V K V Insert (K1, V1) DHT: a visual example K V K V (K1, V1) K V K V K V Retrieve K1 Desired properties of DHT • Scalability: each node does not keep much state • Performance: look up latency is small • Load balancing: no node is overloaded with a large amount of state • Dynamic reconfiguration: when nodes join and leave, the amount of state moved from nodes to nodes is small. -

Cisco SCA BB Protocol Reference Guide
Cisco Service Control Application for Broadband Protocol Reference Guide Protocol Pack #60 August 02, 2018 Cisco Systems, Inc. www.cisco.com Cisco has more than 200 offices worldwide. Addresses, phone numbers, and fax numbers are listed on the Cisco website at www.cisco.com/go/offices. THE SPECIFICATIONS AND INFORMATION REGARDING THE PRODUCTS IN THIS MANUAL ARE SUBJECT TO CHANGE WITHOUT NOTICE. ALL STATEMENTS, INFORMATION, AND RECOMMENDATIONS IN THIS MANUAL ARE BELIEVED TO BE ACCURATE BUT ARE PRESENTED WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED. USERS MUST TAKE FULL RESPONSIBILITY FOR THEIR APPLICATION OF ANY PRODUCTS. THE SOFTWARE LICENSE AND LIMITED WARRANTY FOR THE ACCOMPANYING PRODUCT ARE SET FORTH IN THE INFORMATION PACKET THAT SHIPPED WITH THE PRODUCT AND ARE INCORPORATED HEREIN BY THIS REFERENCE. IF YOU ARE UNABLE TO LOCATE THE SOFTWARE LICENSE OR LIMITED WARRANTY, CONTACT YOUR CISCO REPRESENTATIVE FOR A COPY. The Cisco implementation of TCP header compression is an adaptation of a program developed by the University of California, Berkeley (UCB) as part of UCB’s public domain version of the UNIX operating system. All rights reserved. Copyright © 1981, Regents of the University of California. NOTWITHSTANDING ANY OTHER WARRANTY HEREIN, ALL DOCUMENT FILES AND SOFTWARE OF THESE SUPPLIERS ARE PROVIDED “AS IS” WITH ALL FAULTS. CISCO AND THE ABOVE-NAMED SUPPLIERS DISCLAIM ALL WARRANTIES, EXPRESSED OR IMPLIED, INCLUDING, WITHOUT LIMITATION, THOSE OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT OR ARISING FROM A COURSE OF DEALING, USAGE, OR TRADE PRACTICE. IN NO EVENT SHALL CISCO OR ITS SUPPLIERS BE LIABLE FOR ANY INDIRECT, SPECIAL, CONSEQUENTIAL, OR INCIDENTAL DAMAGES, INCLUDING, WITHOUT LIMITATION, LOST PROFITS OR LOSS OR DAMAGE TO DATA ARISING OUT OF THE USE OR INABILITY TO USE THIS MANUAL, EVEN IF CISCO OR ITS SUPPLIERS HAVE BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. -

Coap Based Acute Parking Lot Monitoring System Using Sensor Networks
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Directory of Open Access Journals ISSN: 2229-6948(ONLINE) ICTACT JOURNAL ON COMMUNICATION TECHNOLOGY: SPECIAL ISSUE ON ADVANCES IN WIRELESS SENSOR NETWORKS, JUNE 2014, VOLUME: 05, ISSUE: 02 COAP BASED ACUTE PARKING LOT MONITORING SYSTEM USING SENSOR NETWORKS R. Aarthi1 and A. Pravin Renold2 TIFAC-CORE in Pervasive Computing Technologies, Velammal Engineering College, India E-mail: [email protected], [email protected] Abstract it to aid in overall management and planning. Sensor networks Vehicle parking is the act of temporarily maneuvering a vehicle in to are a natural candidate for car-park management systems [6], a certain location. To deal with parking monitoring system issue such because they allow status to be monitored very accurately - for as traffic, this paper proposes a vision of improvements in monitoring each parking space, if desired. the vehicles in parking lots based on sensor networks. Most of the existing paper deals with that of the automated parking which is of cluster based and each has its own overheads like high power, less energy efficiency, incompatible size of lots, space. The novel idea in this work is usage of CoAP (Constrained Application Protocol) which is recently created by IETF (draft-ietf-core-coap-18, June 28, 2013), CoRE group to develop RESTful application layer protocol for communications within embedded wireless networks. This paper deals with the enhanced CoAP protocol using multi hop flat topology, which makes the acuters feel soothe towards parking vehicles. We aim to minimize the time consumed for finding free parking lot as well as increase the energy efficiency. -
Peer-To-Peer Systems
Peer-to-Peer Systems Winter semester 2014 Jun.-Prof. Dr.-Ing. Kalman Graffi Heinrich Heine University Düsseldorf Peer-to-Peer Systems Unstructured P2P Overlay Networks – Unstructured Heterogeneous Overlays This slide set is based on the lecture "Communication Networks 2" of Prof. Dr.-Ing. Ralf Steinmetz at TU Darmstadt Unstructured Heterogeneous P2P Overlays Unstructured P2P Structured P2P Centralized P2P Homogeneous P2P Heterogeneous P2P DHT-Based Heterogeneous P2P 1. All features of 1. All features of 1. All features of 1. All features of 1. All features of Peer-to-Peer Peer-to-Peer Peer-to-Peer Peer-to-Peer Peer-to-Peer included included included included included 2. Central entity is 2. Any terminal 2. Any terminal 2. Any terminal 2. Peers are necessary to entity can be entity can be entity can be organized in a provide the removed without removed without removed hierarchical service loss of loss of without loss of manner 3. Central entity is functionality functionality functionality 3. Any terminal some kind of 3. ! no central 3. ! dynamic central 3. ! No central entity can be index/group entities entities entities removed without database 4. Connections in loss of functionality the overlay are Examples: “fixed” Examples: Examples: § Gnutella 0.6 Examples: Examples: § Napster § Gnutella 0.4 § Fasttrack § Chord • AH-Chord § Freenet § eDonkey § CAN • Globase.KOM § Kademlia from R.Schollmeier and J.Eberspächer, TU München HHU – Technology of Social Networks – JProf. Dr. Kalman Graffi – Peer-to-Peer Systems – http://tsn.hhu.de/teaching/lectures/2014ws/p2p.html -

The Parallel File System Lustre
The parallel file system Lustre Roland Laifer STEINBUCH CENTRE FOR COMPUTING - SCC KIT – University of the State Rolandof Baden Laifer-Württemberg – Internal and SCC Storage Workshop National Laboratory of the Helmholtz Association www.kit.edu Overview Basic Lustre concepts Lustre status Vendors New features Pros and cons INSTITUTSLustre-, FAKULTÄTS systems-, ABTEILUNGSNAME at (inKIT der Masteransicht ändern) Complexity of underlying hardware Remarks on Lustre performance 2 16.4.2014 Roland Laifer – Internal SCC Storage Workshop Steinbuch Centre for Computing Basic Lustre concepts Client ClientClient Directory operations, file open/close File I/O & file locking metadata & concurrency INSTITUTS-, FAKULTÄTS-, ABTEILUNGSNAME (in der Recovery,Masteransicht ändern)file status, Metadata Server file creation Object Storage Server Lustre componets: Clients offer standard file system API (POSIX) Metadata servers (MDS) hold metadata, e.g. directory data, and store them on Metadata Targets (MDTs) Object Storage Servers (OSS) hold file contents and store them on Object Storage Targets (OSTs) All communicate efficiently over interconnects, e.g. with RDMA 3 16.4.2014 Roland Laifer – Internal SCC Storage Workshop Steinbuch Centre for Computing Lustre status (1) Huge user base about 70% of Top100 use Lustre Lustre HW + SW solutions available from many vendors: DDN (via resellers, e.g. HP, Dell), Xyratex – now Seagate (via resellers, e.g. Cray, HP), Bull, NEC, NetApp, EMC, SGI Lustre is Open Source INSTITUTS-, LotsFAKULTÄTS of organizational-, ABTEILUNGSNAME -

Tecnologías De Fuentes Abiertas Para Ciudades Inteligentes
Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes www.cenatic.es Abril 2013 Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes Título: Open Smart Cities: Tecnologías de fuentes abiertas para ciudades inteligentes Autora: Ana Trejo Pulido Abril 2012 Edita: CENATIC. Avda. Clara Campoamor s/n. 06200 Almendralejo (Badajoz). Primera Edición. ISBN-13: 978-84-15927-13-6 Los contenidos de esta obra está bajo una licencia Reconocimiento 3.0 España de Creative Commons. Para ver una copia de la licencia visite http://creativecommons.org/licenses/by/3.0/es/ www.cenatic.es Pág. 2 de 59 Open Smart Cities Tecnologías de fuentes abiertas para ciudades inteligentes Índice 1 Introducción...............................................................................................................6 2 La Internet de las Cosas: hacia la ciudad conectada.................................................7 3 Tecnologías de código abierto para la Internet de las Cosas.....................................9 3.1 Waspmote.................................................................................................................10 3.2 Arduino......................................................................................................................10 3.3 Dash7........................................................................................................................11 3.4 Rasberry Pi................................................................................................................11 -

IPFS and Friends: a Qualitative Comparison of Next Generation Peer-To-Peer Data Networks Erik Daniel and Florian Tschorsch
1 IPFS and Friends: A Qualitative Comparison of Next Generation Peer-to-Peer Data Networks Erik Daniel and Florian Tschorsch Abstract—Decentralized, distributed storage offers a way to types of files [1]. Napster and Gnutella marked the beginning reduce the impact of data silos as often fostered by centralized and were followed by many other P2P networks focusing on cloud storage. While the intentions of this trend are not new, the specialized application areas or novel network structures. For topic gained traction due to technological advancements, most notably blockchain networks. As a consequence, we observe that example, Freenet [2] realizes anonymous storage and retrieval. a new generation of peer-to-peer data networks emerges. In this Chord [3], CAN [4], and Pastry [5] provide protocols to survey paper, we therefore provide a technical overview of the maintain a structured overlay network topology. In particular, next generation data networks. We use select data networks to BitTorrent [6] received a lot of attention from both users and introduce general concepts and to emphasize new developments. the research community. BitTorrent introduced an incentive Specifically, we provide a deeper outline of the Interplanetary File System and a general overview of Swarm, the Hypercore Pro- mechanism to achieve Pareto efficiency, trying to improve tocol, SAFE, Storj, and Arweave. We identify common building network utilization achieving a higher level of robustness. We blocks and provide a qualitative comparison. From the overview, consider networks such as Napster, Gnutella, Freenet, BitTor- we derive future challenges and research goals concerning data rent, and many more as first generation P2P data networks, networks. -
Privacy by Design and the Emerging Personal Data Ecosystem
Privacy by Design and the Emerging Personal Data Ecosystem Ann Cavoukian, Ph.D. Information & Privacy Commissioner Ontario, Canada Foreword by Shane Green CEO of Personal October 2012 Acknowledgements The Information and Privacy Commissioner of Ontario, Canada, would like to gratefully acknowledge the contributions of the following individuals whose efforts were invaluable in the drafting of this paper: Michelle Chibba, Director of Policy and Special Projects, IPC, and Policy Department staff; Josh Galper, Chief Policy Officer and General Counsel, Personal; Drummond Reed, Respect Network; Alan Mitchell, Strategy Director, Ctrl-Shift; Claire Hopkins, Marketing and Communications Director, Ctrl-Shift; and Liz Brandt, CEO, Ctrl-Shift. We also appreciate the opportunity to co-launch this paper with the Society for Worldwide Interbank Financial Telecommunication (SWIFT) and acknowledge their contribution to the case study section. We would especially like to thank Peter Vander Auwera, Innovation Leader, SWIFT, and Pierre Blum, Senior Product Manager, SWIFT. 416-326-3333 2 Bloor Street East 1-800-387-0073 Suite 1400 Fax: 416-325-9195 Toronto, Ontario TTY (Teletypewriter): 416-325-7539 Information and Privacy Commissioner M4W 1A8 Website: www.ipc.on.ca Ontario, Canada Canada Privacy by Design: www.privacybydesign.ca TABLE OF CONTENTS Foreword ............................................................................. 1 Introduction ......................................................................... 3 The Personal Data Ecosystem ............................................... -

Evaluation of Active Storage Strategies for the Lustre Parallel File System
Evaluation of Active Storage Strategies for the Lustre Parallel File System Juan Piernas Jarek Nieplocha Evan J. Felix Pacific Northwest National Pacific Northwest National Pacific Northwest National Laboratory Laboratory Laboratory P.O. Box 999 P.O. Box 999 P.O. Box 999 Richland, WA 99352 Richland, WA 99352 Richland, WA 99352 [email protected] [email protected] [email protected] ABSTRACT umes of data remains a challenging problem. Despite the Active Storage provides an opportunity for reducing the improvements of storage capacities, the cost of bandwidth amount of data movement between storage and compute for moving data between the processing nodes and the stor- nodes of a parallel filesystem such as Lustre, and PVFS. age devices has not improved at the same rate as the disk ca- It allows certain types of data processing operations to be pacity. One approach to reduce the bandwidth requirements performed directly on the storage nodes of modern paral- between storage and compute devices is, when possible, to lel filesystems, near the data they manage. This is possible move computation closer to the storage devices. Similarly by exploiting the underutilized processor and memory re- to the processing-in-memory (PIM) approach for random ac- sources of storage nodes that are implemented using general cess memory [16], the active disk concept was proposed for purpose servers and operating systems. In this paper, we hard disk storage systems [1, 15, 24]. The active disk idea present a novel user-space implementation of Active Storage exploits the processing power of the embedded hard drive for Lustre, and compare it to the traditional kernel-based controller to process the data on the disk without the need implementation. -

Peer-To-Peer Systems: Taxonomy and Characteristics 1B
IJCST VOL . 3, Iss UE 2, APR I L - JUNE 2012 ISSN : 0976-8491 (Online) | ISSN : 2229-4333 (Print) Peer-to-Peer Systems: Taxonomy and Characteristics 1B. Lalitha, 2Dr. Ch. D. V. Subbarao 1Dept. of CSE, JNTUCE, Anantapur, AP, India 2Dept. of CSE, S.V University, Tirupathi, AP, India Abstract Various types of networks include: The limitations of client/server systems became a proof in large scale distributed systems for emerging of peer to peer systems, A. Centralized Networks which is the basis for decentralized distributed computing. In peer Centralized P2P protocols consist of a centralized file list. In this to peer model each node takes both the roles of client and server. model a user can send a query for a file to the centralized server. As a client, it can query and download its wanted data files from The server would then send back a list of peers that have the other nodes (peers) and as a server, it can provide data files to requested file. Once the user chooses which peer to download the other nodes. This paper provides the taxonomy of P2P systems file from the centralized would then facilitate the connection of gives an overview of structured and unstructured P2P systems, the peers then remove itself from the process as illustrated in Fig also discusses the characteristics and applications of peer to peer 1. Examples of centralized networks are Napster and eDonkey systems". in its early stages. Keywords Peer-To-Peer, Distributed Systems, Structured P2P, Unstructured P2P Systems. I. Introduction A Peer-to-Peer (P2P) computing or networking is a distributed application architecture that partitions tasks or workloads between peers.