19800025483.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SI Allocations
Free TV Australia DTTB SI Register Transport Stream Service Information for Television Market Area All values are hexadecimal Issue 15 Date: October 2020 Western Australia Tasmania Northern Territory Remote Remote Queensland, Mandurah (Turner NSW, Vic, SA, Tas Perth Bunbury Albany Remote Hobart Launceston Darwin Alice Springs Northern Territory Hill) (See Note 3) (See Notes 1 and 2) (See notes 1 and 2) LCN Broadcaster Service Name SID SID SID SID SID SID SID SID SID SID SID NID NID NID NID NID NID NID NID NID NID NID TSID TSID TSID TSID TSID TSID TSID TSID TSID TSID TSID ONID ONID ONID ONID ONID ONID ONID ONID ONID ONID (dec) ONID 3201 3239 0261 1010 3256 0263 1010 3256 0263 1010 3256 0263 1010 3256 0263 1010 325B 0271 1010 3257 0273 1010 325C 0281 1010 325B 0283 ABC1 2 02E1 02E1 02E1 02E1 02E1 0271 0291 0281 02F1 ABC News 24 24 02E0 02E0 02E0 02E0 02E0 0270 0290 0280 02F0 ABC ABC1 21 02E3 02E3 02E3 02E3 02E3 0273 0293 0283 02F3 ABC2 / ABC4 22 02E2 02E2 02E2 02E2 02E2 0272 0292 0282 02F2 ABC3 23 02E4 02E4 02E4 02E4 02E4 0274 0294 0284 02F4 ABC Dig Music 200 02E6 02E6 02E6 02E6 02E6 0276 0296 0286 02F6 ABC Jazz 201 02E7 02E7 02E7 02E7 02E7 0277 0297 0287 02F7 3202 3202 0320 3202 3202 03A0 3202 3202 03A0 3202 3202 03A0 3202 3202 03A0 3202 3202 0380 3202 3202 0380 3202 3202 0360 SBS ONE 3 0321 03A1 03A1 03A1 03A1 0381 0381 0361 SBS ONE HD 30 0325 03A5 03A5 03A5 03A5 0385 0385 0365 SBS VICELAND HD 31 0326 03A6 03A6 03A6 03A6 0386 0386 0366 SBS World Movies 32 0327 03A7 03A7 03A7 03A7 0387 0387 0367 SBS Food 33 0323 03A3 03A3 03A3 03A3 0383 -

Major Breakthrough for Seven with US Commission for My Kitchen Rules
Major breakthrough for Seven with US commission for My Kitchen Rules FOX Broadcasting Company signs Seven to create My Kitchen Rules for the United States television market The Seven Network – Australia’s most-watched broadcast television platform and a key business of Seven West Media, one of Australia’s leading integrated media and content creation companies - today announced its next move in its long-term strategy in the development and creation of market-leading content in international markets. Building on the increasing international recognition of Seven’s created and produced My Kitchen Rules, the company today confirmed that FOX Broadcasting Company (FOX), one of the “big four” television networks in the United States has signed Seven to create and produce My Kitchen Rules for the United States. The programme – a celebrity version of the successful format - has commenced filming. Today’s signing with FOX for the United States builds on Seven’s agreement to create and produce My Kitchen Rules for Channel 4 in the United Kingdom and joins New Zealand, Serbia, Russia, Denmark, Belgium, Canada, Norway, Germany and Lithuania with “local” versions of the Seven format. In addition, the Australian version of My Kitchen Rules is seen in more than 160 territories around the world. Commenting, the Chief Executive Officer and Managing Director of Seven West Media, Tim Worner, said: “We are very excited to be working with FOX on this one. My Kitchen Rules is truly a labour of love for all of us at Seven. It has played and continues to play such an important role across all parts of our business. -

2015 SWM Annual Report
ABN 91 053 480 845 Delivering the future of content. Anywhere. Any screen. Anytime. Annual Report 2015 Seven West Media cares about the environment. By printing 2000 copies of this Annual Report on ecoStar Silk and ecoStar Offset the environmental impact was reduced by*: 1,185kg 171kg 1,707km of landfill of CO2 and travel in the average greenhouse gases European car 26,982 2,486kWh 1,926kg litres of water of energy of wood Source: European BREF data (virgin fibre paper). Carbon footprint data evaluated by Labelia Conseil in accordance with the Bilan Carbone® methodology. Results are obtained according to technical information and are subject to modification. *compared to a non-recycled paper. Delivering the future of content. Anywhere. Any screen. Anytime. Annual Report 2015 Contents What We Do 4 The Future of Us 44 Our Brands 6 Board of Directors 46 Our Strategy 8 Corporate Governance Statement 49 Our Strategic Framework 10 Directors’ Report 60 Letter from the Chairman 12 Remuneration Report 64 Letter from the Managing Director & CEO 14 Auditor’s Independence Declaration 83 Performance Dashboard 16 Financial Statements 84 Performance of the Business 18 Directors’ Declaration 134 Group Performance 20 Independent Auditor’s Report 135 Television 26 Company Information 137 Newspapers 32 Investor Information 138 Magazines 36 Shareholder Information 139 Other Business and New Ventures 40 Risk, Environment and Social Responsibility 42 2 Seven West Media Annual Report 2015 ABN 91 053 480 845 Contents The right people creating great content across television, digital, mobile and newspaper and magazine publishing. Delivering the future of content 3 What We Do We are achieving growth in the delivery of our content across our portfolio of integrated media platforms. -
Broadcast Centres List
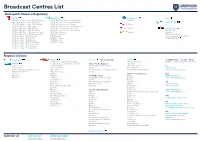
Broadcast Centres List Metropolita Stations/Regulatory 7 BCM Nine (NPC) Ten Network ABC 7HD & SD/ 7mate / 7two / 7Flix Melbourne 9HD & SD/ 9Go! / 9Gem / 9Life Adelaide Ten (10) 7HD & SD/ 7mate / 7two / 7Flix Perth 9HD & SD/ 9Go! / 9Gem / 9Life Brisbane FREE TV CAD 7HD & SD/ 7mate / 7two / 7Flix Adelaide 9HD & SD/ 9Go! / 9Gem / Darwin 10 Peach 7 / 7mate HD/ 7two / 7Flix Sydney 9HD & SD/ 9Go! / 9Gem / 9Life Melbourne 7 / 7mate HD/ 7two / 7Flix Brisbane 9HD & SD/ 9Go! / 9Gem / 9Life Perth 10 Bold SBS National 7 / 7mate HD/ 7two / 7Flix Gold Coast 9HD & SD/ 9Go! / 9Gem / 9Life Sydney SBS HD/ SBS 7 / 7mate HD/ 7two / 7Flix Sunshine Coast GTV Nine Melbourne 10 Shake Viceland 7 / 7mate HD/ 7two / 7Flix Maroochydore NWS Nine Adelaide SBS Food Network 7 / 7mate / 7two / 7Flix Townsville NTD 8 Darwin National Indigenous TV (NITV) 7 / 7mate / 7two / 7Flix Cairns QTQ Nine Brisbane WORLD MOVIES 7 / 7mate / 7two / 7Flix Mackay STW Nine Perth 7 / 7mate / 7two / 7Flix Rockhampton TCN Nine Sydney 7 / 7mate / 7two / 7Flix Toowoomba 7 / 7mate / 7two / 7Flix Townsville 7 / 7mate / 7two / 7Flix Wide Bay Regional Stations Imparaja TV Prime 7 SCA TV Broadcast in HD WIN TV 7 / 7TWO / 7mate / 9 / 9Go! / 9Gem 7TWO Regional (REG QLD via BCM) TEN Digital Mildura Griffith / Loxton / Mt.Gambier (SA / VIC) NBN TV 7mate HD Regional (REG QLD via BCM) SC10 / 11 / One Regional: Ten West Central Coast AMB (Nth NSW) Central/Mt Isa/ Alice Springs WDT - WA regional VIC Coffs Harbour AMC (5th NSW) Darwin Nine/Gem/Go! WIN Ballarat GEM HD Northern NSW Gold Coast AMD (VIC) GTS-4 -

Annual Report Contents
2019 ANNUAL REPORT CONTENTS Victorian Thoroughbred Racing by the Numbers 4 Chairman’s Report 6 CEO Report 8 Member Stakeholders 10 Strategic Framework 11 Racing and Programming 12 Racing Snapshot 15 Prizemoney 18 Owners and Breeders 19 Participants 20 Equine Welfare 22 Integrity 26 Infrastructure 30 Community 32 Diversity and Inclusion 34 Clubs 36 Wagering 39 Media 40 Racing.com 42 Investments and Industry Sustainability Fund 44 Directors’ Report 46 Lead Auditor’s Independence Declaration 56 Independent Auditor’s Report 57 Directors’ Declaration 60 Consolidated Statement of Surplus or Deficit and Other Comprehensive Income 61 Consolidated Statement of Financial Position 62 Consolidated Statement of Cash Flows 63 Consolidated Statement of Changes in Equity 64 Notes to the Financial Statements 65 Racing Victoria Limited ACN 096 917 930 Annual Report for the financial period ended 30 June 2019 Page 2 Racing Victoria 2019 Annual Report Racing Victoria 2019 Annual Report Page 3 VICTORIAN THOROUGHBRED RACING BY THE NUMBERS VICTORIAN THOROUGHBRED RACING BY THE NUMBERS $1.55B ECONOMIC BENEFIT IN REGIONAL AREAS 71,388 1.38M $ ATTENDEES OWNERS 3.20B $ ECONOMIC IMPACT M+ 3,518 INDUSTRY50 SPEND PER ANNUM ON 25,157 INFRASTRUCTURE FULL TIME STABLE EQUIVALENT JOBS EMPLOYEES $7.02 B TOTAL WAGERING CHANNEL 7 TURNOVER AUDIENCE 548 M OVER THE RACE MEETINGS 4.23 VIEWERS 2018 SPRING RACING CARNIVAL $ 294 762M 67 JOCKEYS RACETRACKS 8,808 994 ECONOMIC BENEFIT INDIVIDUAL COMPETING HORSES TRAINERS Page 4 Racing Victoria 2019 Annual Report Racing Victoria 2019 -

Media Release Live Greyhound Racing Comes to Seven in a Historic Deal
The content on this page was published on 18-02-2020. If you notice any inaccuracies, please report it here Media release 18 February 2020 Live greyhound racing comes to Seven in a historic deal Greyhound racing will to return to free-to-air television this year as a series of one-hour live specials on the Seven Network, Greyhound Racing Victoria (GRV) Chair, Peita Duncan, announced today. “GRV will be working with Seven to screen three of Victoria’s biggest race nights across 7mate/7TWO in a historic deal for the code,” Ms Duncan said. “This will provide great coverage for fans while giving more people the opportunity to discover the speed, passion and colour of greyhound racing.” The first special will feature the 2020 Group 1 TAB Australian Cup at The Meadows from 9pm on Saturday 29 February where the best of the best greyhounds will compete for the $300,000 first prize. The second will cover The Launching Pad at Sandown Park on Thursday 9 April which is Australia’s only sweep stakes series returns with $420,000 in prizemoney for the nation’s best emerging greyhounds The third special on Friday 27 November will deliver live coverage of the Group 1 TAB Melbourne Cup from Sandown Park, the biggest night of greyhound racing on the national calendar with more than $1 million in prizemoney across the 12-race programme. Joining the specials will be the return of the greyhound magazine show Thrill of The Chase, a five- part, one-hour series later in 2020. Developed by GRV with Crocmedia and hosted by Jack Heverin, James Van de Maat and GRV’s Molly Haines, the Thrill Of The Chase debuted in 2019, taking viewers inside the world of greyhound racing and showcasing its brightest stars. -

Australia ########## 7Flix AU 7Mate AU 7Two
########## Australia ########## 7Flix AU 7Mate AU 7Two AU 9Gem AU 9Go! AU 9Life AU ABC AU ABC Comedy/ABC Kids NSW AU ABC Me AU ABC News AU ACCTV AU Al Jazeera AU Channel 9 AU Food Network AU Fox Sports 506 HD AU Fox Sports News AU M?ori Television NZ AU NITV AU Nine Adelaide AU Nine Brisbane AU Nine GO Sydney AU Nine Gem Adelaide AU Nine Gem Brisbane AU Nine Gem Melbourne AU Nine Gem Perth AU Nine Gem Sydney AU Nine Go Adelaide AU Nine Go Brisbane AU Nine Go Melbourne AU Nine Go Perth AU Nine Life Adelaide AU Nine Life Brisbane AU Nine Life Melbourne AU Nine Life Perth AU Nine Life Sydney AU Nine Melbourne AU Nine Perth AU Nine Sydney AU One HD AU Pac 12 AU Parliament TV AU Racing.Com AU Redbull TV AU SBS AU SBS Food AU SBS HD AU SBS Viceland AU Seven AU Sky Extreme AU Sky News Extra 1 AU Sky News Extra 2 AU Sky News Extra 3 AU Sky Racing 1 AU Sky Racing 2 AU Sonlife International AU Te Reo AU Ten AU Ten Sports AU Your Money HD AU ########## Crna Gora MNE ########## RTCG 1 MNE RTCG 2 MNE RTCG Sat MNE TV Vijesti MNE Prva TV CG MNE Nova M MNE Pink M MNE Atlas TV MNE Televizija 777 MNE RTS 1 RS RTS 1 (Backup) RS RTS 2 RS RTS 2 (Backup) RS RTS 3 RS RTS 3 (Backup) RS RTS Svet RS RTS Drama RS RTS Muzika RS RTS Trezor RS RTS Zivot RS N1 TV HD Srb RS N1 TV SD Srb RS Nova TV SD RS PRVA Max RS PRVA Plus RS Prva Kick RS Prva RS PRVA World RS FilmBox HD RS Filmbox Extra RS Filmbox Plus RS Film Klub RS Film Klub Extra RS Zadruga Live RS Happy TV RS Happy TV (Backup) RS Pikaboo RS O2.TV RS O2.TV (Backup) RS Studio B RS Nasha TV RS Mag TV RS RTV Vojvodina -

Broadcast Centres List
Broadcast Centres List Metropolita Stations/Regulatory 7 BCM Nine (NPC) Ten Network ABC 7HD & SD/ 7mate / 7two / 7Flix Melbourne 9HD & SD/ 9Go! / 9Gem / 9Life Adelaide Ten (10) 7HD & SD/ 7mate / 7two / 7Flix Perth 9HD & SD/ 9Go! / 9Gem / 9Life Brisbane FREE TV CAD 7HD & SD/ 7mate / 7two / 7Flix Adelaide 9HD & SD/ 9Go! / 9Gem / Darwin 10 Peach 7 / 7mate HD/ 7two / 7Flix Sydney 9HD & SD/ 9Go! / 9Gem / 9Life Melbourne 7 / 7mate HD/ 7two / 7Flix Brisbane 9HD & SD/ 9Go! / 9Gem / 9Life Perth 10 Bold SBS National 7 / 7mate HD/ 7two / 7Flix Gold Coast 9HD & SD/ 9Go! / 9Gem / 9Life Sydney SBS HD/ SBS 7 / 7mate HD/ 7two / 7Flix Sunshine Coast GTV Nine Melbourne 10 Shake Viceland 7 / 7mate HD/ 7two / 7Flix Maroochydore NWS Nine Adelaide SBS Food Network 7 / 7mate / 7two / 7Flix Townsville NTD 8 Darwin National Indigenous TV (NITV) 7 / 7mate / 7two / 7Flix Cairns QTQ Nine Brisbane WORLD MOVIES 7 / 7mate / 7two / 7Flix Mackay STW Nine Perth 7 / 7mate / 7two / 7Flix Rockhampton TCN Nine Sydney 7 / 7mate / 7two / 7Flix Toowoomba 7 / 7mate / 7two / 7Flix Townsville 7 / 7mate / 7two / 7Flix Wide Bay Regional Stations Imparaja TV Prime 7 SCA TV Broadcast in HD WIN TV 7 / 7TWO / 7mate / 9 / 9Go! / 9Gem 7TWO Regional (REG QLD via BCM) TEN Digital Mildura Griffith / Loxton / Mt.Gambier (SA / VIC) NBN TV 7mate HD Regional (REG QLD via BCM) SC10 / 11 / One Regional: Ten West Central Coast AMB (Nth NSW) Central/Mt Isa/ Alice Springs WDT - WA regional VIC Coffs Harbour AMC (5th NSW) Darwin Nine/Gem/Go! WIN Ballarat GEM HD Northern NSW Gold Coast AMD (VIC) GTS-4 -

Seven's Summer of Tennis Set to Sizzle
Seven’s Summer of Tennis set to sizzle LIVE and FREE streaming all summer via a brand new Mobile App experience 7Tennis, including 16 TV courts at Australian Open (10 December 2015) Seven will serve up all the big stars of the tennis world, including Federer, Djokovic, Nadal, Williams, Stosur, Kyrgios and Tomic, on all platforms again allowing viewers to watch live and free anywhere, anytime, on any device. From the Hopman Cup in Perth and the Brisbane International, to Sydney’s APIA International and the Kooyong Classic in Melbourne, all roads on Seven this summer lead to the first Grand Slam of 2016, the Australian Open. In addition to live and exclusive match coverage on Channel 7 and 7TWO, fans will be able to watch every tournament during the Summer of Tennis streamed live on mobile, tablet and PC via 7Tennis. This exclusive live and free online coverage through a brand new 7Tennis app will also allow fans to watch the match of their choice from any TV court throughout the summer – as well as the 7 / 7TWO/7mate broadcast. Fans will also get to choose from up to 16 TV courts at the Australian Open at any one time. And more than just live streaming, viewers will be able to catch up on match highlights, follow players on social media, interact with other fans and keep an eye on live scores. So whether it’s on free-to-air TV, or 7Tennis, Seven will deliver the most comprehensive and compelling coverage of the Australian tennis summer ever seen. -

Seven Partners with Samsung to Deliver 100 Hours of Live and on Demand Virtual Reality and 360 Video from the Olympic Games
Erin Price Edelman for Samsung Tel: +61-(0) 2-9291-3315 +61 433 504 826 [email protected] Seven partners with Samsung to deliver 100 hours of live and on demand virtual reality and 360 video from the Olympic Games The Seven Network and Samsung Electronics Australia today announced a new way for consumers to experience the excitement of the Olympic Games. For the first time ever, Virtual Reality (VR) and 360-degree video will be available to selected Samsung Galaxy smartphones compatible with Samsung Gear VR via the ‘7Rio VR 2016’ app. Selected daily highlights on demand will also be available via facebook.com/7olympics. The ‘7Rio VR 2016’ app will offer up to 100 hours of VR and 360° programming and include the Opening and Closing Ceremonies, men’s basketball, gymnastics, track and field, beach volleyball, diving, boxing and fencing as well as highlight packages of those sports. Kurt Burnette, Event Director, Olympic Games and Chief Revenue Officer, Seven West Media, said: “These Olympic Games will be accessible to every Australian and promise to be the largest aggregated audience ever seen across platforms and screens. The Games content delivered and curated by Seven will be seen, heard, shared and discussed in many new ways with Seven as the driver. We are delighted to be working with Samsung to add another new dimension of content immersion to our coverage of the Olympic Games. Our move into virtual reality with Samsung was purposely created to bring Australians closer to the Games than ever before with 100 hours of virtual reality and 360° video. -

News Access Rules for Television, Radio, Mobile Platform and Internet for the Australian Territory Applicable to the Tokyo Olympic Games 2020
NEWS ACCESS RULES FOR TELEVISION, RADIO, MOBILE PLATFORM AND INTERNET FOR THE AUSTRALIAN TERRITORY APPLICABLE TO THE TOKYO OLYMPIC GAMES 2020 INTRODUCTION The International Olympic Committee (IOC) has granted Seven Network (Operations) Limited (SEVEN) the exclusive right to distribute, transmit, broadcast, communicate, exhibit and display to the public by any means and to any device (Transmit) the Tokyo Olympic Games 2020 within Australia. No other organisation may Transmit within Australia sound or images of any Olympic event, including training venues, sporting action, the Opening Ceremony, the Closing Ceremony and medal ceremonies, mixed zones, interviews or other activities which occur at Olympic Venues, including Olympic Village and Village Square, except as permitted by these News Access Rules (NAR), as set out below. These rules apply to all forms of Transmission, including television (including free to air and pay television, including digital channels, digital multi-channels, linear channels and services such as “News Active” or “Sports Active”), Radio, Internet, Mobile Platform, Social Media and other interactive media or electronic medium. The terms included in the following sections of these NARs define the conditions that apply to the broadcasting and transmission of Olympic Material by Non Rights Holder (NRH) news organisations. Capitalised terms used in these News Access Rules have the meaning set out in the Definitions section of these News Access Rules. These NAR’s shall be in effect from the opening of the Olympic Villages 13 July 2021 until the closing of the Olympic Villages on 11 August 2021 (NAR Period). {00018388} INTERNATIONAL OLYMPIC COMMITTEE Château de Vidy, 1007 Lausanne, Switzerland, Tel. -

Adstream Powerpoint Presentation
Broadcast Centres List Metropolitan Stations/Regulatory Nine (NPC) 7 BCM 7 BCM cont’d Nine (NPC) cont’d Ten Network 9HD & SD / 9Go! / 9Gem / 9Life Adelaide 7HD & SD / 7mate / 7two / 7Flix Melbourne 7 / 7mate / 7two / 7Flix Rockhampton QTQ Nine Brisbane Ten HD (all metro) 9HD & SD / 9Go! / 9Gem / 9Life Brisbane 7HD & SD / 7mate / 7two / 7Flix Perth 7 / 7mate / 7two / 7Flix Toowoomba STW Nine Perth Ten SD (all metro) 9HD & SD / 9Go! / 9Gem / Darwin 7HD & SD / 7mate / 7two / 7Flix Adelaide 7 / 7mate / 7two / 7Flix Townsville TCN Nine Sydney One (all metro) 9HD & SD / 9Go! / 9Gem / 9Life Melbourne 7 / 7mate HD / 7two / 7Flix Sydney 7 / 7mate / 7two / 7Flix Wide Bay Channel 11 (all metro) 7 / 7mate HD / 7two / 7Flix Brisbane 9HD & SD / 9Go! / 9Gem / 9Life Perth SBS National 7 / 7mate HD / 7two / 7Flix Gold Coast 9HD & SD / 9Go! / 9Gem / 9Life Sydney SBS HD / SBS Free TV CAD 7 / 7mate HD / 7two / 7Flix Sunshine Coast ABC GTV Nine Melbourne Viceland 7 / 7mate HD / 7two / 7Flix Maroochydore NWS Nine Adelaide SBS Food Network 7 / 7mate / 7two / 7Flix Townsville NTD 8 Darwin National Indigenous TV (NITV) 7 / 7mate / 7two / 7Flix Cairns WORLD MOVIES 7 / 7mate / 7two / 7Flix Mackay Regional Stations Prime 7 cont’d SCA TV Cont’d WIN TV cont’d VIC Mildura Bendigo WIN / 11 / One Regional: WIN Ballarat Send via WIN Wollongong Imparja TV Newcastle Bundaberg Albury Orange/Dubbo Ballarat Canberra NBN TV Port Macquarie/Taree Bendigo QLD Shepparton Cairns Central Coast Canberra WIN Rockhampton South Coast Dubbo Cairns Send via WIN Wollongong Coffs Harbour