Class Overview Introduction Dynamic Range Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metaflanger Table of Contents
MetaFlanger Table of Contents Chapter 1 Introduction 2 Chapter 2 Quick Start 3 Flanger effects 5 Chorus effects 5 Producing a phaser effect 5 Chapter 3 More About Flanging 7 Chapter 4 Controls & Displa ys 11 Section 1: Mix, Feedback and Filter controls 11 Section 2: Delay, Rate and Depth controls 14 Section 3: Waveform, Modulation Display and Stereo controls 16 Section 4: Output level 18 Chapter 5 Frequently Asked Questions 19 Chapter 6 Block Diagram 20 Chapter 7.........................................................Tempo Sync in V5.0.............22 MetaFlanger Manual 1 Chapter 1 - Introduction Thanks for buying Waves processors. MetaFlanger is an audio plug-in that can be used to produce a variety of classic tape flanging, vintage phas- er emulation, chorusing, and some unexpected effects. It can emulate traditional analog flangers,fill out a simple sound, create intricate harmonic textures and even generate small rough reverbs and effects. The following pages explain how to use MetaFlanger. MetaFlanger’s Graphic Interface 2 MetaFlanger Manual Chapter 2 - Quick Start For mixing, you can use MetaFlanger as a direct insert and control the amount of flanging with the Mix control. Some applications also offer sends and returns; either way works quite well. 1 When you insert MetaFlanger, it will open with the default settings (click on the Reset button to reload these!). These settings produce a basic classic flanging effect that’s easily tweaked. 2 Preview your audio signal by clicking the Preview button. If you are using a real-time system (such as TDM, VST, or MAS), press ‘play’. You’ll hear the flanged signal. -
21065L Audio Tutorial
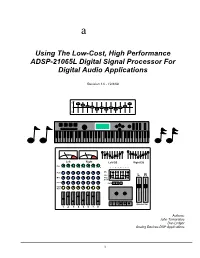
a Using The Low-Cost, High Performance ADSP-21065L Digital Signal Processor For Digital Audio Applications Revision 1.0 - 12/4/98 dB +12 0 -12 Left Right Left EQ Right EQ Pan L R L R L R L R L R L R L R L R 1 2 3 4 5 6 7 8 Mic High Line L R Mid Play Back Bass CNTR 0 0 3 4 Input Gain P F R Master Vol. 1 2 3 4 5 6 7 8 Authors: John Tomarakos Dan Ledger Analog Devices DSP Applications 1 Using The Low Cost, High Performance ADSP-21065L Digital Signal Processor For Digital Audio Applications Dan Ledger and John Tomarakos DSP Applications Group, Analog Devices, Norwood, MA 02062, USA This document examines desirable DSP features to consider for implementation of real time audio applications, and also offers programming techniques to create DSP algorithms found in today's professional and consumer audio equipment. Part One will begin with a discussion of important audio processor-specific characteristics such as speed, cost, data word length, floating-point vs. fixed-point arithmetic, double-precision vs. single-precision data, I/O capabilities, and dynamic range/SNR capabilities. Comparisions between DSP's and audio decoders that are targeted for consumer/professional audio applications will be shown. Part Two will cover example algorithmic building blocks that can be used to implement many DSP audio algorithms using the ADSP-21065L including: Basic audio signal manipulation, filtering/digital parametric equalization, digital audio effects and sound synthesis techniques. TABLE OF CONTENTS 0. INTRODUCTION ................................................................................................................................................................4 1. -
Recording and Amplifying of the Accordion in Practice of Other Accordion Players, and Two Recordings: D
CA1004 Degree Project, Master, Classical Music, 30 credits 2019 Degree of Master in Music Department of Classical music Supervisor: Erik Lanninger Examiner: Jan-Olof Gullö Milan Řehák Recording and amplifying of the accordion What is the best way to capture the sound of the acoustic accordion? SOUNDING PART.zip - Sounding part of the thesis: D. Scarlatti - Sonata D minor K 141, V. Trojan - The Collapsed Cathedral SOUND SAMPLES.zip – Sound samples Declaration I declare that this thesis has been solely the result of my own work. Milan Řehák 2 Abstract In this thesis I discuss, analyse and intend to answer the question: What is the best way to capture the sound of the acoustic accordion? It was my desire to explore this theme that led me to this research, and I believe that this question is important to many other accordionists as well. From the very beginning, I wanted the thesis to be not only an academic material but also that it can be used as an instruction manual, which could serve accordionists and others who are interested in this subject, to delve deeper into it, understand it and hopefully get answers to their questions about this subject. The thesis contains five main chapters: Amplifying of the accordion at live events, Processing of the accordion sound, Recording of the accordion in a studio - the specifics of recording of the accordion, Specific recording solutions and Examples of recording and amplifying of the accordion in practice of other accordion players, and two recordings: D. Scarlatti - Sonata D minor K 141, V. Trojan - The Collasped Cathedral. -

User's Manual
USER’S MANUAL G-Force GUITAR EFFECTS PROCESSOR IMPORTANT SAFETY INSTRUCTIONS The lightning flash with an arrowhead symbol The exclamation point within an equilateral triangle within an equilateral triangle, is intended to alert is intended to alert the user to the presence of the user to the presence of uninsulated "dan- important operating and maintenance (servicing) gerous voltage" within the product's enclosure that may instructions in the literature accompanying the product. be of sufficient magnitude to constitute a risk of electric shock to persons. 1 Read these instructions. Warning! 2 Keep these instructions. • To reduce the risk of fire or electrical shock, do not 3 Heed all warnings. expose this equipment to dripping or splashing and 4 Follow all instructions. ensure that no objects filled with liquids, such as vases, 5 Do not use this apparatus near water. are placed on the equipment. 6 Clean only with dry cloth. • This apparatus must be earthed. 7 Do not block any ventilation openings. Install in • Use a three wire grounding type line cord like the one accordance with the manufacturer's instructions. supplied with the product. 8 Do not install near any heat sources such • Be advised that different operating voltages require the as radiators, heat registers, stoves, or other use of different types of line cord and attachment plugs. apparatus (including amplifiers) that produce heat. • Check the voltage in your area and use the 9 Do not defeat the safety purpose of the polarized correct type. See table below: or grounding-type plug. A polarized plug has two blades with one wider than the other. -

In the Studio: the Role of Recording Techniques in Rock Music (2006)
21 In the Studio: The Role of Recording Techniques in Rock Music (2006) John Covach I want this record to be perfect. Meticulously perfect. Steely Dan-perfect. -Dave Grohl, commencing work on the Foo Fighters 2002 record One by One When we speak of popular music, we should speak not of songs but rather; of recordings, which are created in the studio by musicians, engineers and producers who aim not only to capture good performances, but more, to create aesthetic objects. (Zak 200 I, xvi-xvii) In this "interlude" Jon Covach, Professor of Music at the Eastman School of Music, provides a clear introduction to the basic elements of recorded sound: ambience, which includes reverb and echo; equalization; and stereo placement He also describes a particularly useful means of visualizing and analyzing recordings. The student might begin by becoming sensitive to the three dimensions of height (frequency range), width (stereo placement) and depth (ambience), and from there go on to con sider other special effects. One way to analyze the music, then, is to work backward from the final product, to listen carefully and imagine how it was created by the engineer and producer. To illustrate this process, Covach provides analyses .of two songs created by famous producers in different eras: Steely Dan's "Josie" and Phil Spector's "Da Doo Ron Ron:' Records, tapes, and CDs are central to the history of rock music, and since the mid 1990s, digital downloading and file sharing have also become significant factors in how music gets from the artists to listeners. Live performance is also important, and some groups-such as the Grateful Dead, the Allman Brothers Band, and more recently Phish and Widespread Panic-have been more oriented toward performances that change from night to night than with authoritative versions of tunes that are produced in a recording studio. -

A History of Audio Effects
applied sciences Review A History of Audio Effects Thomas Wilmering 1,∗ , David Moffat 2 , Alessia Milo 1 and Mark B. Sandler 1 1 Centre for Digital Music, Queen Mary University of London, London E1 4NS, UK; [email protected] (A.M.); [email protected] (M.B.S.) 2 Interdisciplinary Centre for Computer Music Research, University of Plymouth, Plymouth PL4 8AA, UK; [email protected] * Correspondence: [email protected] Received: 16 December 2019; Accepted: 13 January 2020; Published: 22 January 2020 Abstract: Audio effects are an essential tool that the field of music production relies upon. The ability to intentionally manipulate and modify a piece of sound has opened up considerable opportunities for music making. The evolution of technology has often driven new audio tools and effects, from early architectural acoustics through electromechanical and electronic devices to the digitisation of music production studios. Throughout time, music has constantly borrowed ideas and technological advancements from all other fields and contributed back to the innovative technology. This is defined as transsectorial innovation and fundamentally underpins the technological developments of audio effects. The development and evolution of audio effect technology is discussed, highlighting major technical breakthroughs and the impact of available audio effects. Keywords: audio effects; history; transsectorial innovation; technology; audio processing; music production 1. Introduction In this article, we describe the history of audio effects with regards to musical composition (music performance and production). We define audio effects as the controlled transformation of a sound typically based on some control parameters. As such, the term sound transformation can be considered synonymous with audio effect. -

Robfreeman Recordingramones
Rob Freeman (center) recording Ramones at Plaza Sound Studios 1976 THIRTY YEARS AGO Ramones collided with a piece of 2” magnetic tape like a downhill semi with no brakes slamming into a brick wall. While many memories of recording the Ramones’ first album remain vivid, others, undoubtedly, have dulled or even faded away. This might be due in part to the passing of years, but, moreover, I attribute it to the fact that the entire experience flew through my life at the breakneck speed of one of the band’s rapid-fire songs following a heady “One, two, three, four!” Most album recording projects of the day averaged four to six weeks to complete; Ramones, with its purported budget of only $6000, zoomed by in just over a week— start to finish, mixed and remixed. Much has been documented about the Ramones since their first album rocked the New York punk scene. A Google search of the Internet yields untold numbers of web pages filled with a myriad of Ramones facts and an equal number of fictions. (No, Ramones was not recorded on the Radio City Music Hall stage as is so widely reported…read on.) But my perspective on recording Ramones is unique, and I hope to provide some insight of a different nature. I paint my recollections in broad strokes with the following… It was snowy and cold as usual in early February 1976. The trek up to Plaza Sound Studios followed its usual path: an escape into the warm refuge of Radio City Music Hall through the stage door entrance, a slow creep up the private elevator to the sixth floor, a trudge up another flight -

Analysis of Flanging and Phasing Algorithms in Music Technology
AALTO UNIVERSITY SCHOOL OF ELECTRICAL ENGINEERING UNIVERSIDAD POLITÉCNICA DE CARTAGENA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA DE TELECOMUNICACIÓN BACHELOR THESIS Analysis of Flanging and Phasing Algorithms in Music Technology Author: Antonio Fuentes Ros Director: Vesa Välimäki Co-director: Rafael Toledo-Moreo October 2019 Acknowledgements: I would like to thank my parents for making this experience possible and for the constant support and love received from them. I would also like to express my gratitude and appreciation to Rafael and Vesa, as they have invested hours of their time in helping me leading this project. Also, many thanks for the support received from the amazing friends I have, as well as the ones I have met throughout this beautiful experience. INDEX 1. INTRODUCTION .................................................................................................... 6 1.1 Content and structure of the project ............................................................... 6 1.2 Objectives .......................................................................................................... 8 2. AUDIO EFFECTS AND ALGORITHMS ............................................................. 9 2.1 Phaser ................................................................................................................. 9 2.1.1 Presentation ................................................................................................. 9 2.1.2 Transfer function ........................................................................................ -

Barberpole Phasing and Flanging Illusions
Proc. of the 18th Int. Conference on Digital Audio Effects (DAFx-15), Trondheim, Norway, Nov 30 - Dec 3, 2015 BARBERPOLE PHASING AND FLANGING ILLUSIONS Fabián Esqueda∗ , Vesa Välimäki Julian Parker Aalto University Native Instruments GmbH Dept. of Signal Processing and Acoustics Berlin, Germany Espoo, Finland [email protected] [email protected] [email protected] ABSTRACT [11, 12] have found that a flanging effect is also produced when a musician moves in front of the microphone while playing, as Various ways to implement infinitely rising or falling spectral the time delay between the direct sound and its reflection from the notches, also known as the barberpole phaser and flanging illu- floor is varied. sions, are described and studied. The first method is inspired by Phasing was introduced in effect pedals as a simulation of the the Shepard-Risset illusion, and is based on a series of several cas- flanging effect, which originally required the use of open-reel tape caded notch filters moving in frequency one octave apart from each machines [8]. Phasing is implemented by processing the input sig- other. The second method, called a synchronized dual flanger, re- nal with a series of first- or second-order allpass filters and then alizes the desired effect in an innovative and economic way using adding this processed signal to the original [13, 14, 15]. Each all- two cascaded time-varying comb filters and cross-fading between pass filter then generates one spectral notch. When the allpass filter them. The third method is based on the use of single-sideband parameters are slowly modulated, the notches move up and down modulation, also known as frequency shifting. -
Sdl2093 Studio Instruction Manual
TM SDL2093 STUDIO INSTRUCTION MANUAL www.singingmachine.com The Singing Machine® is a registered trademark of The Singing Machine Co., Inc. Contents Warnings and Important Safety Information ..............................................................................1 Included .................................................................................................................................................2 Location of Controls ....................................................................................................................3-5 Connection ...........................................................................................................................................6 Connecting the Microphone(s) .............................................................................................6 Connecting the Unit to a TV ..................................................................................................6 Connecting to AC Power ........................................................................................................7 Connecting Headphones .........................................................................................................7 Changing the Interactive Microphone’s Battery ..............................................................8 Rechargeable Battery ........................................................................................................................9 Singing Machine USB Flash Drive ................................................................................................10 -

Waves Abbey Road Reel ADT User Guide
WAVES/ABBEY ROAD Reel ADT USER GUIDE TABLE OF CONTENTS Chapter 1 – Introduction ............................................................................................................ 3 1.1 Welcome ............................................................................................................................ 3 1.2 Product Overview ............................................................................................................. 3 1.3 About ADT ......................................................................................................................... 4 1.4 Concepts and Terminology .............................................................................................. 7 1.5 Components ...................................................................................................................... 7 Chapter 2 – Quick Start (featuring the Mono-to-Stereo Component) .................................... 9 Chapter 3 – Interface and Controls ......................................................................................... 10 3.1 Interface (featuring the Stereo Component) ................................................................. 10 3.2 Controls ........................................................................................................................... 11 General Controls .............................................................................................................. 11 Varispeed Section ........................................................................................................... -

DIGITAL AUDIO WORKSTATIONS (D.A.W.S)
DIGITAL AUDIO WORKSTATIONS (D.A.W.s) Avid Pro Tools is one of many digital audio workstations available today and will be the D.A.W. that we focus on during the course of this class. Though we will be focusing on Pro Tools, many of the concepts learned in this class will apply to other D.A.W.s as well. There are two types of recording mediums: ! Linear recording mediums generally make use of analog or digital tape. You must use transport functions (play, stop, rewind, fast forward) to navigate around the audio. Edits are performed by cutting/splicing or overdubbing. Linear systems are destructive in nature, meaning that alterations to the signal on tape cannot be undone once performed. ! Nonlinear recording mediums generally make use of disk storage mediums. Nonlinear recordings allow immediate navigation and altering of any point in the audio without the need to make use of transport functions. Nonlinear systems are non- destructive in nature. Pro Tools and other D.A.W.s are nonlinear systems. DIGITAL AUDIO BASICS All captured sound is initially analog, meaning that a transducer has converted physical sound waves into a continuous electrical signal. Converting analog signals to binary code – the computer language of 0s and 1s - creates digital audio files. The resulting digital file can then be played back and manipulated in the D.A.W.. Analog signals are converted to digital information using a device known as an analog to digital converter (A.D.C.). An analog to digital converter repeatedly samples the incoming audio at a set sample rate and bit resolution (think of a camera taking thousands of still pictures per second to create the illusion of movement) and stores the resulting information as a digital audio file.