Drifting Fish Aggregating Devices of the Atlantic and Indian Oceans : Modalities of Use, Fishing Efficiency and Potential Management Alexandra Maufroy
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Gill Nets and Their Operation
Gill Nets and their Operation Saly N. Thomas Central Institute of Fisheries Technology P.O. Matsyapuri, Cochin – 682 029 Email: [email protected] Gill net is a highly selective and passive gear accounting for 20% of all the fishing methods of the world. The simplicity of its design, construction, operation and its low energy requirement make the gear very popular in all the sectors especially in the traditional sector. It is a highly selective gear and the use of this gear in a responsible way ensures resource conservation. The gear is a vertical wall of netting, which is kept erect in water by means of floats and sinkers. The gear is mostly rectangular in shape whose upper end is mounted to a float line (head rope) and the lower end to a sinker line (foot rope). The nets are operated in the surface, column or bottom layers of the water column in inland, coastal and deep sea. Gill nets are operated for the capture of different groups of fishes such as sardine, mackerel, prawn, hilsa, and larger varieties like tuna, shark, seer fish, and other large pelagics. When operated for such larger varieties in the deeper areas of the sea the nets extend to several kilometers. Mechanism of fish capture in gill nets The fact that separates gill nets from all other type of fishing is that in gill nets the `mesh’ of the net serves the dual function of `selecting’ the fish to be caught and catching it. The capture of fish in gill nets depends on the net construction, its dimensions, and the shape of the fish body. -
Ghost Net Impacts on Coral Reefs Time to Complete Lesson: 20-30 Minutes
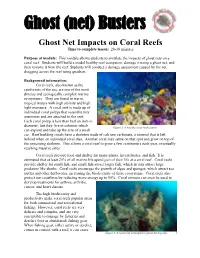
Ghost (net) Busters Ghost Net Impacts on Coral Reefs Time to complete lesson: 20-30 minutes Purpose of module: This module allows students to simulate the impacts of ghost nets on a coral reef. Students will build a model healthy reef ecosystem, damage it using a ghost net, and then remove it from the reef. Students will conduct a damage assessment caused by the net dragging across the reef using quadrats. Background information: Coral reefs, also known as the rainforests of the sea, are one of the most diverse and ecologically complex marine ecosystems. They are found in warm, tropical waters with high salinity and high light exposure. A coral reef is made up of individual coral polyps that resemble tiny anemones and are attached to the reef. Each coral polyp is less than half an inch in diameter, but they live in colonies which Figure 1: A healthy coral reef system. can expand and take up the size of a small car. Reef building corals have a skeleton made of calcium carbonate, a mineral that is left behind when an individual coral dies. Another coral may settle on that spot and grow on top of the remaining skeleton. This allows a coral reef to grow a few centimeters each year, eventually reaching massive sizes. Coral reefs provide food and shelter for many plants, invertebrates, and fish. It is estimated that at least 25% of all marine life spendCredit: part MostBeautifulThings.net of their life at a coral reef. Coral reefs provide shelter for small fish, and small fish attract larger fish, which in turn attract large predators like sharks. -

Drifting Fish Aggregating Devices (Fads) Deploying, Soaking and Setting – When Is a FAD ‘Fishing’?
THE INTERNATIONAL JOURNAL OF MARINE The International Journal of AND COASTAL Marine and Coastal Law 34 (2019) 731–754 LAW brill.com/estu Drifting Fish Aggregating Devices (FADs) Deploying, Soaking and Setting – When is a FAD ‘Fishing’? Quentin Hanich,a Ruth Davis,a Glen Holmes,b Elizabeth-Rose Amidjogbea and Brooke Campbella a Australian National Centre for Ocean Resources and Security (ANCORS), University of Wollongong, Wollongong, NSW, Australia b GH Consulting Services, Brisbane, Queensland, Australia [email protected]; [email protected]; [email protected]; [email protected]; [email protected] Abstract This article describes the proliferation of drifting fish aggregating devices (FADs) and analyses subsequent legal questions that arise for fisheries and marine litter manage- ment over who is responsible for FADs during their drifting stage. This follows recent concerns about unlicensed FADs drifting through closed areas. This article analyses a case study of the Western and Central Pacific Fisheries Commission (WCPFC) in order to determine State obligations to manage drifting FADs. Analysis concludes that a drifting FAD in the WCPFC Area is ‘fishing’ from deployment to recovery, thereby creat- ing obligations to monitor, control and report drifting FADs, consistent with broader obligations for coastal and flag States. The article recommends strengthening regional management in three ways: implement regional drifting FAD monitoring systems; con- trol deployment of drifting FADs so as to promote recovery and minimize lost gear; -

Impact of “Ghost Fishing“ Via Derelict Fishing Gear
2015 NOAA Marine Debris Program Report Impact of “Ghost Fishing“ via Derelict Fishing Gear 2015 MARINE DEBRIS GHOST FISHING REPORT March 2015 National Oceanic and Atmospheric Administration National Ocean Service National Centers for Coastal Ocean Science – Center for Coastal Environmental Health and Biomolecular Research 219 Ft. Johnson Rd. Charleston, South Carolina 29412 Office of Response and Restoration NOAA Marine Debris Program 1305 East-West Hwy, SSMC4, Room 10239 Silver Spring, Maryland 20910 Cover photo courtesy of the National Oceanic and Atmospheric Administration For citation purposes, please use: NOAA Marine Debris Program. 2015 Report on the impacts of “ghost fishing” via derelict fishing gear. Silver Spring, MD. 25 pp For more information, please contact: NOAA Marine Debris Program Office of Response and Restoration National Ocean Service 1305 East West Highway Silver Spring, Maryland 20910 301-713-2989 Acknowledgements The National Oceanic and Atmospheric Administration (NOAA) Marine Debris Program would like to acknowledge Jennifer Maucher Fuquay (NOAA National Ocean Service, National Centers for Coastal Ocean Science) for conducting this research, and Courtney Arthur (NOAA National Ocean Service, Marine Debris Program) and Jason Paul Landrum (NOAA National Ocean Service, Marine Debris Program) for providing guidance and support throughout this process. Special thanks go to Ariana Sutton-Grier (NOAA National Ocean Science) and Peter Murphy (NOAA National Ocean Service, Marine Debris Program) for reviewing this paper and providing helpful comments. Special thanks also go to John Hayes (NOAA National Ocean Service, National Centers for Coastal Ocean Science) and Dianna Parker (NOAA National Ocean Science, Marine Debris Program) for a copy/edit review of this report and Leah L. -

Design a Safe Fishing Net Notes for Teachers
You need: Design a safe • Paper or card • Pencils • Colouring pens fishing net or pencils Thousands of whales and dolphins die every year because they get trapped in fishing nets. They can’t get to the surface to breathe, so they suffocate and drown. How can we design nets that can catch fish, but won’t accidentally catch whales and dolphins? Each child will need some 1 paper, a pencil and some colouring supplies. Their challenge is to design a net that will successfully catch fish, but won’t catch whales and dolphins. Encourage children to think about what they’ve learnt about whales 2 and dolphins that might help them with their designs, for example: • How do dolphins find their food? • How big are whales and dolphins? Scan or take photos of the best net designs and send them to [email protected] – we’d love to see them! Design a safe fishing net Notes for teachers Ask the children questions to encourage them to think about their designs. Their solutions might involve stopping whales and dolphins from swimming into the net in the first place, or ways to escape if they do get trapped. Some great ideas from other children have included: • Brightly coloured nets that are easily seen; • Nets that make noise to scare whales and dolphins away; • Sensors that detect if a whale or dolphin is nearby, then retract the net; • Monitored cameras so fishermen can see and release a trapped whale or dolphin; • Nets that do not close if a whale or dolphin, or the weight of a whale or dolphin, is detected. -

Assessing the Number of Moored Fishing Aggregating Devices Through Aerial Surveys: a Case Study from Guadeloupe
1 Fisheries Research Achimer January 2017, Volume 185 Pages 73-82 http://dx.doi.org/10.1016/j.fishres.2016.10.003 http://archimer.ifremer.fr http://archimer.ifremer.fr/doc/00355/46605/ © 2016 Elsevier B.V. All rights reserved. Assessing the number of moored fishing aggregating devices through aerial surveys: A case study from Guadeloupe Guyader Olivier1, *, Bauer Robert 2, Reynal Lionel 3 1 Ifremer, Univ Brest, CNRS, UMR 6308, AMURE, Unité d’Economie Maritime, IUEM, F-29280 Plouzane, France 2 Ifremer, UMR Marbec, Avenue Jean Monnet, CS 30171, 34203 Sète Cedex, France 3 Ifremer, Unité Biodiversité et Environnement, Département Ressources Biologiques et Environnement (RBE), Délégation de Martinique 79 Route de Pointe-Fort, 97231 Le Robert, Martinique * Corresponding author : Olivier Guyader, email address : [email protected] Abstract : Moored fish aggregating devices (MFADs) are increasingly being used in small-scale tropical fisheries to access pelagic fish species that are otherwise difficult to harvest in large numbers. Little attention has yet been paid to monitoring MFADs in coastal areas, however. This is most likely due to the small-scale nature of most fisheries that utilize them and the presumed lower impact of those fisheries on fish stocks and their ecosystems. In this paper, we examined the abundance and density of MFADs around Guadeloupe, using aerial line transect surveys. Estimated MFAD densities were found to be high compared with previously reported densities in this area, especially within the 22–45 km range offshore. We examine and discuss possible reasons for these high densities. The main drivers appear to be the target species dolphinfish (Coryphaena hippurus) and yellowfin tuna (Thunnus albacares) and related fishing behaviour. -

Marine Advisory China Fishing Vessels 03-2017.Pdf
8619 Westwood Center Drive Suite 300 THE REPUBLIC OF LIBERIA Vienna, Virginia 22182, USA Tel: +1 703 790 3434 LIBERIA MARITIME AUTHORITY Fax: +1 703 790 5655 Email: [email protected] Web: www.liscr.com 16 May 2017 Marine Advisory: 03/2017 SUBJECT: Precautions when Navigating Waters in and around Ningbo-Zhoushan, China Dear Owner, Operator, Master and Designated Person Ashore: Purpose The purpose of this Advisory is to bring attention to recent collisions involving Chinese fishing and Liberian flagged vessels and provide additional information to assist Master’s in safely navigating highly congested waters off Ningbo-Zhoushan in the East China Sea. These collisions occurred mostly at night or in fog conditions where visibility was restricted and additional lookouts were not engaged. Discussion The Chinese port Port of Ningbo-Zhoushan is located in Ningbo and Zhoushan on the coast of the East China Sea, in Zhejiang province and is ranked the busiest cargo port in the world. Large fleets of fishing junks may be encountered on the coast of China. The junks may not be carrying lights. They are solidly built and serious damage could be incurred by colliding with them. Fishing vessels vary from traditional rowing or sailing craft as little as 3m long to modern trawlers 15m long and over. We recently met with China Maritime Safety Administration (MSA) to review the collision cases and explore possible measures to help prevent similar casualties and loss of life. Attached is an Advisory prepared by Ningbo MSA that provides guidance for Master’s on navigating through the East China Sea and areas where there may be high concentrations of fishing vessels. -
Victorian Fish Aggregation Devices
Photos courtesy of NSW Fisheries Victorian Fish Aggregation Devices Feasibility Assessment and Concept Design Recreational Fishing Grants Program Research Report Victorian Fish Aggregation Devices Feasibility Assessment and Concept Design Project number: RFGP/11/12/13 March 2013 Recreational Fishing Grants Program Research Report If you would like to receive this information/publication in an accessible format (such as large print or audio) please call the Customer Service Centre on 136 186, TTY 1800 122 969, or email [email protected]. Published by the Department of Primary Industries Fisheries Victoria, March 2013 © The State of Victoria 2013. This publication is copyright. No part may be reproduced by any process except in accordance with the provisions of the Copyright Act 1968. Preferred way to cite this publication: Green C. P. Victorian Fish Aggregation Devices - Feasibility Assessment and Concept Design. Recreational Fishing Grant Program – Research Report. Department of Primary Industries, Victoria ISBN 978-1-74326-414-0 (print) 978-1-74326-415-7 (online) Copies are available from the website: www.dpi.vic.gov.au/fishing Authorised by the Department of Primary Industries 1 Spring Street, Melbourne 3000. Author Attribution: Please contact Dr Corey Green (03) 5258 0111 for information on this project. Disclaimer This publication may be of assistance to you but the State of Victoria and its employees do not guarantee that the publication is without flaw of any kind or is wholly appropriate for your particular purposes and therefore disclaims all liability for any error, loss or other consequence which may arise from you relying on any information in this publication. -

Use of Video Monitoring to Quantify Spatial and Temporal Patterns in Fishing Activity Across Sectors at Moored Fish Aggregating Devices Off Puerto Rico
SCIENTIA MARINA 82(2) June 2018, 107-117, Barcelona (Spain) ISSN-L: 0214-8358 https://doi.org/10.3989/scimar.04730.09A Use of video monitoring to quantify spatial and temporal patterns in fishing activity across sectors at moored fish aggregating devices off Puerto Rico Wessley Merten 1, Roberto Rivera 2, Richard Appeldoorn 3, Kelvin Serrano 4, Omar Collazo 4, Nilda Jimenez 4 1 Collaborative FAD Research Programme, Beyond Our Shores, Inc., PO Box 662, Rockville, MD 20848, USA. (WM) (Corresponding author) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0001-8746-0058 2 College of Business, University of Puerto Rico Mayagüez, PO Box 9000, Mayagüez, PR 00681, USA. (RR) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0003-2890-6966 3 Department of Marine Sciences, University of Puerto Rico, Mayagüez, PO Box 9000, Mayagüez, PR 00681, USA. (RA) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0003-2179-7496 4 Puerto Rico Department of Natural and Environmental Resources, Fish and Wildlife Bureau, Marine Ecology Division, PO Box 366147, SJ, PR 00926, USA. (KS) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0001-5963-193X (OC) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0003-2478-7285 (NJ) E-mail: [email protected]. ORCID iD: https://orcid.org/0000-0001-7515-8951 Summary: A key challenge in small-scale fisheries that use moored fish aggregating devices (mFADs) is the ability to accurately quantify multi-sector fishing activity through fishery-independent methods. -
Global Lessons and Information to Assist with Monofilament Gill Net Management in Ghana
Global lessons and information to assist with monofilament gill net management in Ghana For additional information on partner activities: WorldFish: http://www.worldfishcenter.org Friends of the Nation: http://www.fonghana.org Hen Mpoano: http://www.henmpoano.org Sustainametrix: http://www.sustainametrix.com This publication is available electronically on the Coastal Resources Center’s website at http://www.crc.uri.edu For more information on the Integrated Coastal and Fisheries Governance project, contact: Coastal Resources Center, University of Rhode Island, Narragansett Bay Campus, 220 South Ferry Road, Narragansett, Rhode Island 02882, USA. Brian Crawford, Director International Programs at [email protected]; Tel: 401-874-6224; Fax: 401-874-6920. Citation: Coastal Resources Center. (2013) Global lessons and information to assist with monofilament gill net management in Ghana. USAID Integrated Coastal and Fisheries Governance Program for the Western Region of Ghana. Narragansett, RI: Coastal Resources Center, Graduate School of Oceanography, University of Rhode Island. 14 pp. Disclaimer: This publication is made possible by the generous support of the American people through the United States Agency for International Development (USAID)/Ghana. The contents of this report are the responsibility of the Integrated Coastal and Fisheries Governance (ICFG) Program and do not necessarily reflect the views of the United States Government. Associate Cooperative Agreement No. 641-A-00-09-00036-00 for “Integrated Coastal and Fisheries Governance (ICFG) Program for the Western Region of Ghana,” under the Leader with Associates Award No. EPP-A-00-04-00014-00. Cover Photo: Fishermen repairing their nets Cover Photo Credit: Coastal Resources Center – Ghana [2 Acknowledgements Background research and drafting of this information brief was completed by Pip Cohen, with editorial input from David Mills. -

Fish Aggregating Devices (Fads) Prathibha Rohit Principal Scientist, Pelagic Fisheries Division CMFRI Research Centre, Mangalore P.B
Fish aggregating devices (FADs) Prathibha Rohit Principal Scientist, Pelagic Fisheries Division CMFRI Research Centre, Mangalore P.B. 244, Mangalore, Karnataka-575 001 Fish aggregating devices, more commonly called FADs, are anchored or drifting objects that are placed in the ocean to attract fish. They may be a permanent, semi-permanent or temporary structure or device made from any material and used to lure fish. They have been used for thousands of years in various forms. The earliest surface/ midwater FADs were elements from nature such as driftwood and trees. Fishermen from Indonesia and Philippines began building floating rafts of bamboo and other materials to attract fish as early as 1900. Now surface and midwater artificial FADs are systematically used in a large number of countries. Present practices vary considerably, sometimes involving advanced technology. Traditional FADs, based on long-term fishing experience, are made on-the-spot with local materials and used in shallow coastal waters (depth 50-200 m) by small-scale fishers to catch small pelagic fish and bait, e.g. payaos (Philippines), unjang (Malaysia), rumpon (Indonesia). Modern FADs, the result of imported technology and materials, can be anchored to over 3000 m. Drifting FADs are not tethered to the bottom and can be natural objects such as logs or man-made. Certain models have large surface dimensions. Moored FADs occupy a fixed location and attach to the sea bottom using a weight such as a concrete block. A rope made of floating synthetics such as polypropylene attaches to the mooring and in turn attaches to a buoy. The buoy can float at the surface (lasting 3–4 years) or lie subsurface (mid water FAD) to avoid detection and surface hazards such as weather and ship traffic. -

Fish Aggregating Devices Drift Like Oceanographic Drifters in the Near-Surface Currents of the Atlantic and Indian Oceans
Fish aggregating devices drift like oceanographic drifters in the near-surface currents of the Atlantic and Indian Oceans T. Imzilena, E. Chassotb, J. Bardec, H. Demarcqa, A. Maufroya,d, L. Roa-Pascualia, J-F. Ternona, C. Lette,∗ aMARBEC, IRD, Ifremer, Univ Montpellier, CNRS, S`ete,France bIRD, Seychelles Fishing Authority, PO BOX 449, Victoria, Seychelles cInstitut de Recherche pour le D´eveloppement (IRD), Indian Ocean Commission, Eb`ene,´ Mauritius dORTHONGEL, 11 bis rue des sardiniers, 29 900 Concarneau, France eIRD, Sorbonne Universit´e,UMMISCO, F-93143, Bondy, France Abstract Knowledge of ocean surface dynamics is crucial for oceanographic and cli- mate research. The satellite-tracked movements of hundreds of drifters de- ployed by research and voluntary observing vessels provide high-frequency and high-resolution information on near-surface currents around the globe. Consequently, they constitute a major component of the Global Ocean Ob- serving System (GOOS). However, maintaining this array is costly and in some oceanic regions such as the tropics, spatio-temporal coverage is lim- ited. Here, we demonstrate that the GPS-buoy equipped fish aggregating devices (FADs) used in tropical tuna fisheries to increase fishing success are also capable of providing comparable near-surface current information. We analyzed millions of position data collected between 2008 and 2014 from more than 15,000 FADs and 2,000 drifters, and combined this information with remotely-sensed near-surface current data to demonstrate that the sur- face velocity components of FADs and drifters are highly correlated in the Atlantic and Indian Oceans. While it was noted that the subsurface struc- tures of FADs did slow them down relative to the drifters, particularly in the Atlantic Ocean, this bias was measurable and could be accounted for ∗Corresponding author Email address: [email protected] (C.