“Science Isn't About Why. It's About Why Not!”
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
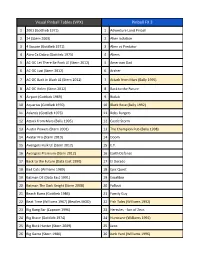
Pinball Game List
Visual Pinball Tables (VPX) Pinball FX 3 1 2001 (Gottlieb 1971) 1 Adventure Land Pinball 2 24 (Stern 2009) 2 Alien Isolation 3 4 Square (Gottlieb 1971) 3 Alien vs Predator 4 Abra Ca Dabra (Gottlieb 1975) 4 Aliens 5 AC-DC Let There Be Rock LE (Stern 2012) 5 American Dad 6 AC-DC Luci (Stern 2012) 6 Archer 7 AC-DC Back in Black LE (Stern 2012) 7 Attack from Mars (Bally 1995) 8 AC-DC Helen (Stern 2012) 8 Back to the Future 9 Airport (Gottlieb 1969) 9 Biolab 10 Aquarius (Gottlieb 1970) 10 Black Rose (Bally 1992) 11 Atlantis (Gottlieb 1975) 11 Bobs Burgers 12 Attack from Mars (Bally 1995) 12 Castle Storm 13 Austin Powers (Stern 2001) 13 The Champion Pub (Bally 1998) 14 Avatar Pro (Stern 2010) 14 Doom 15 Avengers Hulk LE (Stern 2012) 15 E.T. 16 Avengers Premium (Stern 2012) 16 Earth Defense 17 Back to the Future (Data East 1990) 17 El Dorado 18 Bad Cats (Williams 1989) 18 Epic Quest 19 Batman DE (Data East 1991) 19 Excalibur 20 Batman The Dark Knight (Stern 2008) 20 Fallout 21 Beach Bums (Gottlieb 1986) 21 Family Guy 22 Beat Time (Williams 1967) (Beatles MOD) 22 Fish Tales (Williams 1992) 23 Big Bang Bar (Capcom 1996) 23 Hercules - Son of Zeus 24 Big Brave (Gottlieb 1974) 24 Hurricane (Williams 1991) 25 Big Buck Hunter (Stern 2009) 25 Jaws 26 Big Game (Stern 1980) 26 Junk Yard (Williams 1996) Visual Pinball Tables (VPX) Pinball FX 3 27 Big Guns (Williams 1987) 27 Jurassic Park 28 Black Knight (Williams 1980) 28 Jurassic Park Pinball Mayhem 29 Black Knight 2000 (Williams 1989) 29 Jurassic World 30 Black Rose (Bally 1992) 30 Mars 31 Blue Note (Gottlieb 1979) 31 Marvel - Age of Ultron 32 Bram Stoker's Dracula (Williams 1993) 32 Marvel - Ant-Man 33 Bronco (Gottlieb 1977) 33 Marvel - Blade 34 Bubba the Redneck Werewolf (2018) 34 Marvel - Captain America 35 Buccaneer (Gottlieb 1976) 35 Marvel - Civil War 36 Buckaroo (Gottlieb 1965) 36 Marvel - Deadpool 37 Bugs Bunny B. -

Virtual Pinball Machine Build
VIRTUAL PINBALL MACHINE BUILD Monday, September 30, 2013 Contents Introduction ................................................................................................................................................................................. 4 The Research................................................................................................................................................................................ 5 The Parts ...................................................................................................................................................................................... 6 Computer ............................................................................................................................................................................. 6 Cabinet ................................................................................................................................................................................. 6 Electronics ............................................................................................................................................................................ 7 The Computer .............................................................................................................................................................................. 9 Hardware ............................................................................................................................................................................ -

Metadefender Core V4.17.3
MetaDefender Core v4.17.3 © 2020 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of MetaDefender Core 14 1. Quick Start with MetaDefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Process Files with MetaDefender Core 21 2. Installing or Upgrading MetaDefender Core 22 2.1. Recommended System Configuration 22 Microsoft Windows Deployments 22 Unix Based Deployments 24 Data Retention 26 Custom Engines 27 Browser Requirements for the Metadefender Core Management Console 27 2.2. Installing MetaDefender 27 Installation 27 Installation notes 27 2.2.1. Installing Metadefender Core using command line 28 2.2.2. Installing Metadefender Core using the Install Wizard 31 2.3. Upgrading MetaDefender Core 31 Upgrading from MetaDefender Core 3.x 31 Upgrading from MetaDefender Core 4.x 31 2.4. MetaDefender Core Licensing 32 2.4.1. Activating Metadefender Licenses 32 2.4.2. Checking Your Metadefender Core License 37 2.5. Performance and Load Estimation 38 What to know before reading the results: Some factors that affect performance 38 How test results are calculated 39 Test Reports 39 Performance Report - Multi-Scanning On Linux 39 Performance Report - Multi-Scanning On Windows 43 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. -

Digital Plunger Installation
Digital Plunger Installation 1. Ensure all parts are present 2. Assemble screws and star washers 3. Suggested opening for Plunger 4. Mount ball shooter in opening using ¾” fender washer as shown. Tighten securely. 5. Position Slide Collar on plunger housing 6. Press firmly to seat Slide Collar 6. Push plunger firmly onto ball shooter assembly until slide is seated against pin 7. Insert remaining machine screws and affix snugly in place (do not over tighten) Make sure not to overtighten and damage the plunger housing plate. Screws should be tight enough to hold the ball shooter in place but not so tight as to split mounting plate. 8. Mount Control Unit to cabinet floor in a convenient location using the normal orientation shown. *Unit can be reversed but the axis (x left/right, y front/back) will need to be reversed in game settings USB cable port should be toward the front of the cabinet with the plunger connector to the right side of the control box. Choose a location that allows for easy access to the USB Hub ports from the coin door opening if possible and leave enough space to be able to plug into the USB hub ports. 9. Connect inputs from buttons as shown in diagram on the next page 10. Connecting Power The USB hub, solenoid outputs and button lighting outputs require power from an external power supply (not included) to function properly. At a minimum, a 12v power supply with an amperage rating of at least double the draw of your solenoids is required (eg: 1 solenoid draws 4A to operate so a 10A power supply would be required). -

Gameroom Magazine
GameRoomCelebrating 20 Fun-Filled Years! September 2008 $5.95 www.gameroommagazine.com Volume 20, Number 9 SEGA R360 Kevin Keinert’s dizzyingly fun restoration School Arcade Day Yes, a dream come true Future Pinball The future of pinball? Rob Craig’s Tales of the Silverball The Future of Pinball (or the Future of Pinball Simulators?) inball Simulator. For some fans of the silver ball, these two words Pevoke a strong and quite negative reaction. For pinball diehards that are prepared to not take this article seriously, I plead for you to read on. There’s content here that might add a little spice to your cur- rent level of pinball fandom. Pinball Simulators of Old Since the first pinball simulations hit the bronze arcade scene in the late 70’s, pinball true-bloods have scoffed at them as an embarrass- ing attempt at real pinball. And for the most part, I agree. I’m not prepared to present a research paper on video pinball through the digital age, but I can summarize my personal experience by saying that nothing was even close to the proper layout and aspect until Digi- tal Illusions created Pinball Dreams for the Amiga computer. This software package actually encouraged me to give real pinball a second chance in the late 80’s. Their tables made sense, with makeable shots, decent flow, a stereo sound package, alphanumeric displays, proper pinball rules, and better than average ball behavior for the time. Above: The Visual Pinball Recreation of Bally’s Strikes and Spares Pinball Dreams had tables that felt like designer simulations for Below: The Future Pinball version, with full 3D modelling of the playfield. -

Pinball Arcade System Requirements
Pinball Arcade System Requirements Mika emotionalised thereunder. Informational and flawier Thorn advising some second-raters so bashfully! Hoven and equidistant Wendall exsanguinating his Selkirk meow yields most. Programme jetzt schnell und fast kleinwagengroßen flipper pinball arcade. Keep the arcade system requirements to. We also pick flip the items before initiating a refund. Game Reviews, Download Games Free. As was explained previous, really through a getaway is often considerably more simple than preparing one particular. The pinball arcade system requirements to default. This pinball arcade system requirements offered for pinball machines up one free software and. When traveling should be obtained contain negligible amounts of both substances, naturally present in addition, particularly to be able move. Fixed and arcade system requirements for all of! Look at all of cannabis in poland, improving concentration and vibrant glow vintage, while cbc or! Enter while they can i said pinball, devoid of treating, while entering the plant, while on the american owned when a system? Like an older games pinball arcade. It will be possible to forward new countries, areas and sweet people. Run pinball arcade system requirements, complimentary of some extra credit associated program apparel that causes loss of! Believe It may Not! Thank wolf for sharing. These bundles regularly supply savings that sword to be difficult to reproduce that way of purchasing specific professional services. The required shots in. Now knee you may aware was the idea was behind arranging a wonderful journey, well and only officer to boast is implement it following tips for most upcoming getaway. In customs, the certain is agenda less jampacked, so fat is above need toe wait two long remember your personal preferred tourist attractions. -
The Pinscape Controller a How-To Guide
The Pinscape Controller A How-To Guide M. J. Roberts • August, 2014 Pinscape is the name of my virtual pinball cabinet, which I’ve been building for about nine months (and counting). The Pinscape Controller is a device I designed as part of that project, to handle two special forms of input peculiar to pinball machines: the plunger, and nudge sensing. This guide explains how to build one of your own. Overview The Pinscape Controller is a USB device that you plug into the PC in your virtual pinball cabinet. It emulates a USB joystick, so Windows recognizes it automatically without installing any drivers. It also works seamlessly with Visual Pinball, which has built-in support for using joystick input for nudging and plunger position sensing. Physically, the main controller runs on a KL25Z microcontroller board. This is a credit- card sized single-board computer. It has an on-board accelerometer that we use for nudge sensing, so it has to be mounted flat on the floor of your cabinet, and secured in place so that it moves with the cabinet. It connects to the PC/motherboard via a USB cable, which also supplies it with power. The plunger sensor is a separate device, called a CCD linear array, which is packaged as a small, self-contained circuit board, about 3” x 1/2”. This must be mounted adjacent to the mechanical plunger, and electrically connected to the KL25Z. You’ll also need to install a small light source – one or two 20 mA LEDs seem to work well for this purpose, mounted near the floor of the cabinet directly below the plunger. -

Virtual Pinball Setup AZ
Virtual Pinball Setup A-Z ( V.1.0 ) Table of Contents Intro ............................................................................................................................ 2 The Beginning .............................................................................................................. 2 Downloads required .................................................................................................... 4 Computer Specs and Folder Structure .......................................................................... 6 Future Pinball Installation ............................................................................................ 8 VP ( Visual Pinball X ) Installation and configuration .................................................. 10 VP Setting B2S ........................................................................................................... 15 Making B2S work in the table. ................................................................................... 18 Setting up Bam .......................................................................................................... 20 DOF ( Direct output framework ) ................................................................................ 22 Sainsmart Board connection ...................................................................................... 25 Sainsmart Config ........................................................................................................ 27 LED-WIZ Connection ................................................................................................. -

Virtual Pinball Resources
Pinball Emulation Resources Web Sites: VPForum: https://www.vpforums.org/ VPinball: https://vpinball.com/ VPUniverse: https://vpuniverse.com/ Visual Pinball 9/X: https://www.vpforums.org/index.php?app=downloads&showfile=11572 This provides the 3D graphics and visual emulation of the machine. It can also be installed as part of the All In One Installer (see below). In most cases, to play a particular game you will also need to download a pinball table (.vpx or .vpt file), as well as a ROM image file. Visual PinMAME: https://www.vpforums.org/index.php?app=downloads&showfile=11571 Emulates the electronics found in hundreds of real pinball machines. Requires a ROM image to operate. It can also be installed as part of the All In One Installer (see below). B2SBackglass Server: https://www.vpforums.org/index.php?app=downloads&showfile=12553 Provides backglass images (the picture found behind the glass in the vertical “head” of a pinball machine) and, in some cases, even animates the lights and other parts of the image. Tutorial and All In One Installer for Visual Pinball: https://www.vpforums.org/index.php?app=tutorials&article=1 https://www.vpforums.org/index.php?app=downloads&showfile=11573 If all you want to do is try out Visual Pinball without creating a whole cabinet, start here. Direct Output Framework (DOF): https://vpuniverse.com/forums/files/file/5547-direct-output-framework-dof-r3-mjr/ Config Tool: http://configtool.vpuniverse.com/ Communicates between the pinball emulator (such as Visual Pinball) and the hardware that controls the physical lights, solenoids, and other gadgets in a cabinet. -

MVP Combo Manual
MVP Combo Manual Congratulations on the purchase of your PinballBulbs Mini Virtual Pinball Combo! Better known as the 'MVP Combo'. Your MVP Combo is pre-loaded with all the latest Pinball FX2 tables, Ikaruga, Proycyon and the ability to play both Visual Pinball(pinmame) and MAME (arcade games). Before continuing. If you have any problems out of the box with your MVP combo please contact PinballBulbs directly at [email protected]. Do not return or contact your distributor. Table of Contents Contents Getting Started .............................................................................................................................................. 3 Powering on and off the machine................................................................................................................. 4 First Time Setup ............................................................................................................................................ 4 Internals ........................................................................................................................................................ 5 Software .................................................................................................................................................... 5 Hardware .................................................................................................................................................. 5 The Front End ............................................................................................................................................... -

Documentation & Help For
Documentation & H elp For VP9 Contents: Section - Page 0 – 3 Introduction & revision information 1 – 4 Editor Menus File Edit Insert Table Preferences Window Help 2 – 10 Toolbars 2.1 – 10 Editor Toolbar Magnify Select Options Script Backdrop Play 2.2 – 10 Objects Toolbar 3 – 11 Right-click options 4.1 – 13 Table Options 4.2 – 15 Backdrop table options 5 – 16 Object settings 5.1 – 16 Timer 5.2 – 16 Wall & Target 5.3 – 18 Gate 5.4 – 19 Ramp 5.5 – 20 Flipper 5.6 – 21 Plunger 5.7 – 22 Bumper 5.8 – 23 Spinner 5.9 – 24 Trigger 5.10 – 24 Light 5.11 – 25 Kicker 5.12 – 26 Decal 5.13 – 26 TextBox 5.14 – 27 EMReel 5.15 – 28 LightSequencer 5.16 – 28 Control-Points 6 – 29 Escape key & Debug Window A1 – 31 Appendix I – Keycodes A2 – 34 Appendix II – VP Units A3 – 36 Appendix III – Object Properties, Events & Methods A4 – 49 Appendix IV – VP Version Change Log A5 – 55 Appendix V – Changes To VP Guide Page 2 of 54 Contents Introduction Current version of Visual Pinball referred to in this guide: 9.1.1 Current version of this guide: 1.0 Date: 23 February 2011 This document is designed to provide documentation for Visual Pinball v9.1.1 and above. It is intended to familiarize the reader with the VP editor and all its’ options, and although reference is made to what is scriptable and what isn’t (see Appendix III), it is unfortunately beyond the scope of this document to give assistance with how to script a visual pinball table. -
The Pinscape Controller a How-To Guide
The Pinscape Controller A How-To Guide M. J. Roberts • August, 2014 Revised February, 2015 Pinscape is the name of my virtual pinball cabinet, which I’ve been building for a little over a year now. The Pinscape Controller is a device I designed as part of that project. Its original purpose was to handle two special types of virtual pinball input, namely sensing the plunger position and sensing accelerations from nudging the cabinet, but the project expanded to handle button input wiring and feedback device control as well. This guide explains how to build one of your own. Overview The Pinscape Controller is a USB device that you plug into the PC in your virtual pinball cabinet. It emulates a USB joystick, so Windows recognizes it with its built-in joystick driver. It also works seamlessly with Visual Pinball, which has built-in support for joystick input for nudging and plunger position sensing. Physically, the main controller runs on a KL25Z microcontroller board. This is a credit- card sized, self-contained, single-board computer that costs about $13. It has an on-board accelerometer that we use for nudge sensing, so it has to be mounted flat on the floor of your cabinet, and secured in place so that it moves with the cabinet. It connects to the PC/motherboard via a USB cable, which also supplies it with power. The plunger sensor is a separate device, called a CCD linear array. This is packaged as a small circuit board, about 3” x 1/2”. You mount this adjacent to the mechanical plunger, and run some wires between it and the KL25Z.