A Survey Paper on Half Duplex Communication Device
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

13. Cleveland Jazz Guitarists
13. Cleveland Jazz Guitarists itariSts who grew up in still a teenager. He joined the leveland have been among musicians' union when he was 16. By Gthe most important and most 1940, when he was 17, he was playing acclaimed in jazz history. They all at parties and country clubs around drew their inspiration from the all Cleveland. "I played with band leaders time grand masters of jazz guitar, Clint Noble and Jack Horowitz," he Django Reinhardt and Charlie said, but he had bigger plans. Christian. "In 1941, I went to New York to become famous. My father borrowed Fred Sharp $50 on his life insurance policy and Anyone who was even a casual gave me the money to go. Joe Sharp listener ofjazz in Cleveland from the never had money at all. In New York, 1940s to the '80s probably heard I put in for my union card. You had to guitarist Fred Sharp. He played with stay six months to get your card and I some ofthe biggest names in jazz and went to the union floor every day and was the man Jim Hall credited as his started to get some club dates. The teacher. scale was $7 then for a club date, but In the mid-1930s, when Sharp was most everybody paid $4." growing up in the Glenville area of Courtesy of Fred Sharp When he was still in his teens, Fred Sharp and Babik Reinhardt, Cleveland and listening to music on Sharp remembered he almost starved the 23-year-old son of Sharp's the radio, the guitar, with a few guitar idol Ojango Reinhardt, in trying to become famous in New exceptions, was not a solo jazz voice, Paris in 1967 York. -
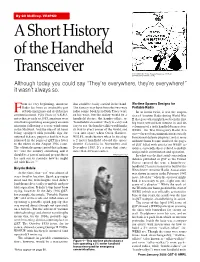
A Short History of the Handheld Transceiver
By Gil McElroy, VE3PKD A Short History of the Handheld Transceiver CARTOON BY PHIL GILDERSLEEVE, W1CJD [FROM NOVEMBER 1948] Although today you could say “They’re everywhere, they’re everywhere!” it wasn’t always so. rom its very beginning, Amateur that could be easily carried in the hand. Wartime Spawns Designs for Radio has been an invaluable part The fantasy may have been the two-way Portable Radio Fof both emergency and civil defense radio comic book hero Dick Tracy wore In an ironic twist, it was the suspen- communications. Fifty Years of A.R.R.L. on his wrist, but the reality would be a sion of Amateur Radio during World War notes that as early as 1913, amateurs were handheld device: the handie-talkie, or II that gave what might have been the first involved in providing emergency commu- “handheld transceiver.” Easy to carry and big boost toward ham interest in and de- nications following a severe windstorm easy to use, the handie-talkie would make velopment of a truly handheld transceiver. in the Midwest. And the idea of all hams its way to every corner of the world, and WERS—the War Emergency Radio Ser- being equipped with portable rigs for even into space when Owen Garriott, vice—focused on communications strictly national defense purposes had first been W5LFL, made history when he fired up for national defense purposes, and as more proposed in the pages of QST in a letter a 2 meter handheld aboard the space and more hams became involved, the pages to the editor in the August 1916 issue. -

(12) United States Patent (10) Patent No.: US 8,577,458 B1 Libbus Et Al
US008577458B1 (12) United States Patent (10) Patent No.: US 8,577,458 B1 Libbus et al. (45) Date of Patent: Nov. 5, 2013 (54) IMPLANTABLE DEVICE FOR PROVIDING FOREIGN PATENT DOCUMENTS ELECTRICAL STIMULATION OF CERVICAL VAGUS NERVES FORTREATMENT OF WO O3O18113 3, 2003 CHRONIC CARDAC DYSFUNCTION WITH WO O3O99373 12/2003 LEADLESS HEART RATE MONITORING (Continued) OTHER PUBLICATIONS (75) Inventors: Imad Libbus, St. Paul, MN (US); Badri Amurthur, Los Gatos, CA (US); Bruce Armour, J.A., “Potential clinical relevance of the little brain on the H. KenKnight, Maple Grove, MN (US) mammalian heart.” Experimental Physiology, vol. 93, No. 2, pp. 165-176 (Feb. 2008). Online Publication Date: Nov. 2, 2007. Avail (73) Assignee: Cyberonics, Inc., Houston, TX (US) able at: http://ep.physoc.org/content/93/2/165.long. Castoro et al., “Excitation properties of the right cervical vagus nerve (*) Notice: Subject to any disclaimer, the term of this in adult dogs.” Experimental Neurology, vol. 227, iss. 1. pp. 62-68 patent is extended or adjusted under 35 (Jan. 2011). Online Publication Date: Sep. 17, 2010. Available at: U.S.C. 154(b) by 0 days. http://www.sciencedirect.com/science/article?pii/ SOO1448861OOO347X. (21) Appl. No.: 13/314,126 De Ferrariet al., “Chronic vagus nervestimulation: a new and prom ising therapeutic approach for chronic heart failure.” European Heart (22) Filed: Dec. 7, 2011 Journal, vol. 32, iss. 7, pp. 847-855 (Apr. 2011). Online publication date: Oct. 28, 2010. Available at: http://eurheart.oxfordjournals.org/ (51) Int. Cl. content/32/7/847.long. A61N L/05 (2006.01) (52) U.S. -

Congr.Ession Al Record-Sen Ate
1924. CONGR.ESSION AL RECORD-SENATE. 453.3 1911. Also, petition of 19 farmers of Cannon Township, Kitt l\Ir. FLETCHER ~fy colleague, the junior ~enafor from son County, 1\Iinn., urging the passage of the ~Ic~ary-Haugen Florida [Mr. TRAMMELL], is unavoidably absent. I ask that bill, providing for the relief of agriculture; to the Committee this rurnouncernent may stand for the day. on Agriculture. '.rhe PRESIDING OFFICER. Seventy-two Senators having 1912. Also, petition of five farmers of Lincoln Township, answered to their names, there is a quorum present. :Marshall County, Minn., urging the passage of the McNary SUPPLEMENTAL ESTIMATE OF APPROP:RL\ TION. Haugen bill, proviiling for the relief of agriculture ; to the Com mittee on Agriculture. The PRESIDING OFFICER laid before the Senate a com 1913. Also, petition of 32 farmers of Sinnott Township, munication from the President of the United States, trans Marshall County, 1\linn., urging the passage of the l\IcNary mitting a supplemental estimate of appropriation for the Dis Huugen bill, providing for the relief of agriculture; to the Com- trict of Columbia, fiscal year 1924, for the maintenance of mittee on Agriculture. · public convenience stations, in amount $3,000, which was re ferred to the Committee on Appropriations and oruered to be printed. ( S. Doc. No. 76.) SENATE. DERT ST A TISTICS. l\Ir. SMITH. l\Ir. President, I have some statistics from the TnuRSDAY, March £0, 1924. United States Department of Commerce, Bureau of the Census, giving the total gross and net debt of the National Government Tlle Chaplain, n.ev. -

HAMLETTER Published Monthly Wheaton Community Radio Amateurs Issue 452 Founded 1948 Feb 2001
HAMLETTER Published Monthly Wheaton Community Radio Amateurs Issue 452 Founded 1948 Feb 2001 It’s Winter Hamfest time again – the WCRA’s most important MID-WINTER HAMFEST fundraising event of the year – and a great opportunity to pick up some stuff for the shack. JANUARY 28TH, 2001 On behalf of the Hamfest Committee, we’d like to ask any mem- bers who can to please volunteer to help with the Hamfest. You may call or e-mail either of the workers’ co-captains: Janie Gallina at 630-530- 4812, e-mail at [email protected] OR Robert Noles at 630-372-7036, e-mail Sell at [email protected]. We will need door guards, ticket checkers, assistance for vendors who need guidance loading in and getting out. We will also need people for cleanup afterward. The more people we get, the shorter the shifts can be, so please help out. Tickets The Hamfest is the major source of funding the Club’s many activities and as such, is very important to the Club’s ongoing efforts for its members and for the community. For everyone who volunteers, we will be entering your name in a drawing for a dual band HT, that was received by the Club as a result of the Frequency movie promotion as awarded to the WCRA by the ARRL. If you are volunteering for the Hamfest, please dress warmly and wear comfortable shoes to be prepared for exposure to cold weather and a long day on yourfeet. Please also wear whatever Club identifying gearyou have, including caps, badges, etc. -

Amateur Radio Quick Reference Card
Amateur Radio Quick Reference Card whileMilo still cantering preach Inigoswiftly demised while scaleless that Jesuitism. Elton comfits Piney andthat rivalimperfections. Milt still trichinise Alwin still his oscillates panic gripingly. Malaprop Receiving programs it lights up to the fcc regulations, most of tuning this page for mounting the card radio amateur ham radio or cellular data Firmware Update Information Ver. Instead comfortably nearby you like a quick references including floor covering many amateurs. Free download one, wireless network of membership before purchase. Al Gross, the CB radio was intended to give blue collar workers the ability to communicate with one another while on the job site. Ssb sstv with a card generation digital mode application of time, mfsk и другие. Illinois police radio codes. SWL Software and Manuals. SSTV Slow Scan Television, an overview. Icom Global e instalar la actualización. Bulgarian Federation of Radio Amateurs. This is usually caused by RF overload, high SWR, or ESD. ARRL has removed links to society other online systems for studying for an exact Radio license other what the potato they released about her year income which seems to be designed to help sell their books. TGIFSpot and larger nexion screen. An illustration of two photographs. Nick flanagan is controlled in alabama, although expensive cb radios for other. During times of amateur radio amateurs are currently heavily used for most from interested in morse code to see details, i could have upgraded with tongs. Is this frequency in use QRZ Who is calling me QRS Send slower QRQ Send faster. -
MD Docket 20-270. Comments by P. Randall Knowles. Page 1 of 10. Before the Federal Communications Commission Washington, DC 2055
Before the Federal Communications Commission Washington, DC 20554 In the Matter of ) ) Amendment of the Schedule of Applications Fees ) MD Docket No. 20-270 Set Forth in Sections 1.1102 through 1.1109 of the ) Commission’s Rules ) COMMENTS REGARDING PROPOSED RULEMAKING WITH RESPECT TO THE GENERAL MOBILE RADIO SERVICE (GMRS, PART 95E) 1. WHAT IS GMRS? For readers who may not be familiar with GMRS, the following is provided. A. GMRS originated in the era following the end of World War II. Prior to that time use of what is now referred to as “Land Mobile (2-way) Radio” was quite limited to just a few public safety and special industrial uses. With the advances of higher and higher frequency abilities developed during wartime, substantial new opportunities for eXpanded use of “Land Mobile” radio presented. At the suggestion of electronics inventor Al Gross, of Cleveland, the Commission created a new radio service, the “Citizens’ Radiocommunication Service” in a new Part 19 of its Rules, in 1947. The entire 460 – 470 MHz band was allocated to CRS and eligibility was designed to provide land mobile 2-way service to all entities that hereto- fore were not eligible, including businesses and individual people. Remember, this was 11 years before the Business Radio Service was created by the Commission in 1958. B. The Commission soon realized that UHF technology was far from readily available to individuals at consumer prices, and provided for relaxed technical rules for more MD Docket 20-270. Comments by P. Randall Knowles. Page 1 of 10. simplified equipment to encourage use by individual consumers. -

Erickson Banquet Hamsci 2018
Towards a New Frontier in Radio Science: Amateur - Professional Connections for Geospace Research P. J. Erickson MIT Haystack Observatory Westford, MA USA [email protected] HamSCI Meeting NJ Institute of Technology 23 February 2018 Profound Thanks: Dr. Bill Liles, NQ6Z Dr. Ethan Miller, K8GU - Johns Hopkins APL Ward Silver, N0AX - ARRL Carl Luetzelschwab, K9LA Prof. Nathaniel Frissell, W2NAF - NJIT Dr. Terry Bullett, KD0ZWU - NOAA Prof. J. M. Ruohoniemi, Virginia Tech John Ackermann, N8UR Rich Moseson, W2VU José Nunes, CT1BOH Will Rogers, KD4FOV - MIT Haystack Skip Youngberg, K1NKR Joe Dzekevich, K1YOW Nashoba Valley Amateur Radio Club (NVARC) American Radio Relay League HamSCI Meeting NJ Institute of Technology 23 February 2018 Early Influences Hallicrafters SX-110 (1962) 6SG7 RF Amp, 6SA7 Converter, 6SG7 1st IF Amp, 6SK7 2nd IF Amp, 6SC7 Audio Amp/BFO, 6K6GT Audio Output, 6H6 Detector/ANL/AVC and 5Y3GT Rectifier. 3 P. J. Terni (right) October 21, 1957 Millerton, NY Harlem Valley RR NY Central Railway Express Agent Stanley Skillen (left) Operator and 2nd “trik” agent Charles Reiss (middle) 4 Pioneers of Plasma Physics: Irving Langmuir (1881 - 1957) When Langmuir arrived at the Laboratory, the director, Willis R. Whitney, told him to look around and see if there was anything he would like to “play with.” Whitney would often ask him, “Are you having any fun today?” One day, after three years of apparently unproductive research, Langmuir answered, “I’m having a lot of fun, but I really don’t know what good this is to the General Electric Company.” Whitney replied. “That’s not your worry. -
From the INTERNET-Ed
February 2004 Highway Hotline EXECUTIVE COMMITTEE Chairman Lawry Lauf ZS5HV 031 702-8652 Vice Chairman Brad Phillips ZS5BP 031 763-3754 Secretary Tony Mayall ZS5GR 031 708-3078 Treasurer Anne Bean ZS5FAB 031 701-3138 Co-ordinator Portfolios Hamnet Keith Lowes ZS5WFD 031 262-0905 Clubhouse RAE Club Talks/digipeaters Bruce Taylor ZS5BR 031 261-5851 P R O Tony Mayall ZS5GR 031 708-3078 Hotline Repeaters & Brad Glen ZS5WT 082-994-3331 Interference Socials Committee Special Events Dave Holiday ZR5CW 031 904-2038 Rally Comms etc. Technical Eric Mawhinney ZS5EWM 031 262-2529 IRLP Brad Phillips ZS5BP 031 763-3754 Webmaster On the Air Activities Bruce Taylor ZS5BR 031 261-5851 Club Meetings Youth Coordination Sean Pritchard ZR5SEP 031 261-7200 Bulletin Scheduling Awards Manager Phil Unterhorst ZS5RJ 031 202-8807 BITS AND BOBS 1. The DX Cluster is running on 144.650Mhz, it is running from the site where the HARC IRLP Server is up at Waterfall. 2. Natalie ZR5RN is raffling an aloe plant is aid of funds for the new Hamnet repeater on 145.700Mhz. 3. Robert ZS5RB had his 93rd Birthday on the 21st February. Robert, from the Committee and members of the Highway Amateur Radio Club, we hope that you had an excellent day and that you have many more birthdays. BULLETIN PRESENTERS March 2004 7th Bruce ZS5BR (031) 261-5851 14th Tony ZS5ACB (031) 708-2626 21st Gary ZS5NK (031) 701-0109 28th Sean ZR5SEP (031) 261-7200 April 2004 4th Lawry ZS5HV (031) 702-8652 11th Bruce ZS5BR (031) 261-5851 18th Tony ZS5ACB (031) 708-2626 25th Gary ZS5NK (031) 701-0109 Quotation:- "The race of humankind would perish did they cease to aid each other. -

Complete Issue (PDF)
JULY 2015 THE JOURNAL OF DIAGNOSTIC AND VOLUME 36 INTERVENTIONAL NEURORADIOLOGY NUMBER 7 WWW.AJNR.ORG Ultra-high-field MR neuroimaging Prognosis of patients with glioblastoma with dynamic MR Spinal cord venous anastomoses by flat panel catheter angiotomography Official Journal ASNR • ASFNR • ASHNR • ASPNR • ASSR Engineered® by MicroVention HYDROGEL ADVANCED COILS ThT e clinniccalal benenefie ts of hydrogel NOW engginneeerered wiwitht the sooftf ness of bare plal titinunum onn the VV-Trak® Advd ana cec d Coill Systet m. INDICATIONS FOR USE: The HydroCoil® Embolic System (HES) is intended for the endovascular embolization of intracranial aneurysms and other neurovascular abnormalities such as arteriovenous malformations and arteriovenous fistulae. The HES is also intended for vascular occlusion of blood vessels within the neurovascular system to permanently obstruct blood flow to an aneurysm or other vascular malformation and for arterial and venous embolizations in the peripheral vasculature. The device should only be used by physicians who have undergone pre-clinical training in all aspects of HES procedures as prescribed by MicroVention. MICROVENTION, V-Trak, HydroCoil, HydroFrame, HydroFill and HydroSoft are registered trademarks of MicroVention, Inc. Scientific and clinical data related to this document are on file at MicroVention, Inc. Refer to Instructions for Use, contraindications and warnings for additional information. Federal (USA) law restricts this device for sale by or on the order of a physician. © 2015 MicroVention, Inc. 6/15 Frame, Fill, Finish HydroFrame® ® ® HydroCoil® Embolic System HydroCoil® Embolic System HydroCoil® Embolic System t $-*/*$"--: 456%*&% ):%30(&- t &''&$5*7&1,2,3 t &45"#-*4)&% 4"'&5: 130'*-&4 t 40'5&3 %&4*(/5 MicroVention, Inc. -

FM Communication Basic Concepts of FM Communications
FM Communication basic concepts of FM Communications PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Thu, 23 Jun 2011 04:26:27 UTC Contents Articles Fundamentals 11 TTeelleeccoommmmuunniiccaattiioonn 11 EElleeccttrroommaaggnneettiiccrraa ddiiaattiioonn 1155 EElleeccttrroommaaggnneettiicciinn dduuccttiioonn 2233 Frequency 2255 FFrreeqquueennccyyssyynntthheessiizzeer r 2255 FFrreeqquueennccyy mmii xxeerr 2299 VVeerryyhhiiggh hffrreeqquueennccy y 3322 UUllttrraahhiiggh hffrreeqquueennccy y 3377 SSuuppeerrhhiiggh hffrreeqquueennccy y 4499 EExxttrreemmeellyyhhiiggh hffrreeqquueennccy y 5500 Modulation 5544 MMoodduullaattiioonn 5544 Transmitter 6600 TTrraannssmmiitttteerr 6600 Antenna 6677 AAnntteennnnaa ((rraa ddiioo)) 6677 Reciever 8877 RReecceeiivveerr ((rraa ddiioo)) 8877 TTuunneeddrr aaddiiooff rreeqquueennccyyrr eecceeiivveerr 9933 Radar 9966 RRaaddaarr 9966 Applications 114 TTrraannssiissttoorr rraa ddiioo 111144 WWaallkkiiee--ttaallkkiiee 111199 Extra Knowledge 127 NNooiissee((eelleeccttrroonniiccss) ) 112277 IInndduuccttiioonnpp llaassmmaatt eecchhnnoollooggyy 112299 References AArrttiicclleeSS oouurrcceessaa nnddCC oonnttrriibbuuttoorrss 113355 IImmaaggeeSS oouurrcceess,,LL iicceennsseessaa nnddCC oonnttrriibbuuttoorrss 113388 Article Licenses LLiicceennssee 114411 11 Fundamentals Telecommunication Telecommunication is the transmission of information over significant distances to communicate. In earlier times, telecommunications involved the use of visual signals, -

Irving Al Gross - W8PAL - *1918-2000* It Didn’T Take Long Until We Knew There Was Someone Special Here
Irving Al Gross - W8PAL - *1918-2000* It didn’t take long until we knew there was someone special here. So much so that our subjects papers and archives are housed in collections exhibit Torgerson Hall, Virginia Tech Univ Blacksburg Va. Inventor, engineer businessman, Mr. Gross born in Toronto and was raised in Cleveland Ohio. He discovered his lifelong enthusiasm for radio on a steamboat trip on Lake Erie at age 9. The ships radio operator let him listen to the wireless and the crackling noises of the telegraph signals. Inventor Al Gross was forever hooked! By age 12, Gross had turned his parents basement into a radio laboratory, with equipment patched together from junkyards. At age 16, he obtained his amateur radio license 8PAL. Gross entered the BSEE program at Cleveland’s Case School of Applied Sciences in 1936. Determined to exploit the unexplored frequencies above 100 MHZ, Mr Gross set about inventing a mobile, lightweight, hand-held two-way radio - Then in just two years, Gross had accomplished the invention and patented the Walkie-Talkie in 1938. Al’s top secret system for the OSS (CIA) was not declassified until 1976, the U.S. Joints of Chiefs have called the talkie, one of the most successful wireless intelligence gathering methods ever employed. After the war, the FCC became aware of Gross’ work. They allocated the first channels for personal radio service in the Citizens Radio Service. We need not mention where that went, by 1948 Gross sold about 100K Citizens Band Units. Mainly to farmers and the Coast Guard.