Design and Construction of the KSTAR Tokamak
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Engineering Design Evolution of the JT-60SA Project
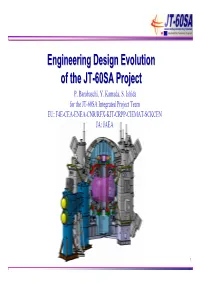
EngineeringEngineering DesignDesign EvolutionEvolution ofof thethe JTJT --60SA60SA ProjectProject P. Barabaschi, Y. Kamada, S. Ishida for the JT-60SA Integrated Project Team EU: F4E-CEA-ENEA-CNR/RFX-KIT-CRPP-CIEMAT-SCKCEN JA: JAEA 1 JTJT --60SA60SA ObjectivesObjectives •A combined project of the ITER Satellite Tokamak Program of JA-EU (Broader Approach) and National Centralized Tokamak Program in Japan. •Contribute to the early realization of fusion energy by its exploitation to support the exploitation of ITER and research towards DEMO. ITER DEMO Complement Support ITER ITER towards DEMO JT-60SA 2 TheThe NewNew LoadLoad AssemblyAssembly • JT60-U: Copper Coils (1600 T), Ip=4MA, Vp=80m 3 • JT60-SA: SC Coils (400 T), Ip=5.5MA, Vp=135m 3 JTJTJT-JT ---60U60U JTJTJT-JT ---60SA60SA JT-60SA(A ≥2.5,Ip=5.5 MA) ITER (A=3.1,15 MA) 3.0m 6.2m ~2.5m ~4m 1.8m KSTAR (A=3.6, 2 MA) 1.7m EAST (A=4.25,1 MA) 1.1m 3 SST-1 (A=5.5, 0.22 MA) 3 HighHigh BetaBeta andand LongLong PulsePulse • JT-60SA is a fully superconducting tokamak capable of confining break- max even equivalent class high-temperature deuterium plasmas ( Ip =5.5 MA ) lasting for a duration ( typically 100s ) longer than the timescales characterizing the key plasma processes, such as current diffusion and particle recycling. • JT-60SA should pursue full non-inductive steady-state operations with high βN (> no-wall ideal MHD stability limits). 4 4 PlasmaPlasma ShapingShaping • JT-60SA will explore the plasma configuration optimization for ITER and DEMO with a wide range of the plasma shape including the shape of ITER , with the capability to produce both single and double null configurations. -

Conceptual Design Report on JT-60SA ___1. JT-60SA
Conceptual Design Report on JT-60SA ________ 1. JT-60SA Mission and Program 1.1 Introduction Realization of fusion energy requires long-term research and development. A schematic of fusion energy development is shown in Fig. 1.1-1. Fusion energy development is divided into 3 phases before commercialization. The large Tokamak phase achieved equivalent break-even plasmas in JET and JT-60 and significant DT Power productions in TFTR and JET. A programmatic objective of the ITER phase is demonstration of scientific and technical feasibility of fusion energy. A primary objective of the DEMO phase is to demonstrate power (electricity) production in a manner leading to commercialization of fusion energy. The fast track approach to fusion energy is to shorten its development period for fusion energy utilization by adding appropriate programs (BA program) in parallel with ITER. Program elements are advanced tokamak/simulation studies and fusion technology/material development. Fig. 1.1-1 Schematic of fusion energy development To specify program elements needed in parallel with ITER, we have to identify the concept of DEMO. Typical DEMO concepts of Japan and EU are shown in Fig.1.1-2. Although size spans widely, operation mode is unanimously “steady-state”. Ranges of the normalized beta are pretty close each other, βN=3.5 to 4.3 for JA DEMO and 3.4 to 4.5 for EU DEMO. Fig. 1.1-2 Cross section and parameters of JA-EU DEMO studies ave 2 The neutron wall load of DEMO exceeds that of ITER (Pn =0.57MW/m ) by a factor of 3-6. -

Overview of Versatile Experiment Spherical Torus (VEST)
Overview of Versatile Experiment Spherical Torus (VEST) Y.S. Hwang and VEST team March 29, 2017 CARFRE and CATS Dept. of Nuclear Engineering Seoul National University 23rd IAEA Technical MeetingExperimental on Researchresults and plans of Using VEST Small Fusion Devices, Santiago, Chille Outline Versatile Experiment Spherical Torus (VEST) . Device and discharge status Start-up experiments . Low loop voltage start-up using trapped particle configuration . EC/EBW heating for pre-ionization . DC helicity injection Studies for Advanced Tokamak . Research directions for high-beta and high-bootstrap STs . Preparation of long-pulse ohmic discharges . Preparation for heating and current drive systems . Preparation of profile diagnostics Long-term Research Plans Summary 1/36 VEST device and Machine status VEST device and Machine status 2/36 VEST (Versatile Experiment Spherical Torus) Objectives . Basic research on a compact, high- ST (Spherical Torus) with elongated chamber in partial solenoid configuration . Study on innovative start-up, non-inductive H&CD, high and innovative divertor concept, etc Specifications Present Future Toroidal B Field [T] 0.1 0.3 Major Radius [m] 0.45 0.4 Minor Radius [m] 0.33 0.3 Aspect Ratio >1.36 >1.33 Plasma Current [kA] ~100 kA 300 Elongation ~1.6 ~2 Safety factor, qa ~6 ~5 3/36 History of VEST Discharges • #2946: First plasma (Jan. 2013) • #10508: Hydrogen glow discharge cleaning (Nov. 2014) Ip of ~70 kA with duration of ~10 ms • #14945: Boronization with He GDC (Mar. 2016) Maximum Ip of ~100 kA • # ??: -

Past, Present and Future of the US-KSTAR Collaboration Hyeon K
Past, Present and Future of the US-KSTAR Collaboration Hyeon K. Park POSTECH at 2009 US-KSTAR Workshop GA.SanDiego, CA On April 15-16, 2009 Past of the international fusion effort • Three large tokamak era: non-steady state device based on Cu coils (pulse length is limited by the cooling system < ~ 20 sec.) – Tokamak Fusion Test Reactor (USA) 1982-1997, Princeton Plasma Physics Laboratory, USA ¾ Fusion power yield: Q ~ 0.3 from D-T experiment – Joint European Tokamak (EU):1983 – present, Culham, Oxfordshore, UK ¾ Fusion power yield: Q ~ 0.7 from D-T experiment – JT-60U (Japan):1985 - present, Japan Atomic Energy Agency (JAEA), Japan ¾ Q~1.25 extrapolated from D-D experiment Internal view of Internal view of TFTR Internal view of JT60-U JET/plasma discharge Future (ITER) • The goal is "to demonstrate the scientific and technological feasibility of fusion power for peaceful purposes". – Demonstration of fusion power yield; Q (output power/input power) ~10 – International consortium (Europe, Japan, USA, Russia, Korea, China, and India) – Total cost ~ $10 B for ~10 years Physics basis is empirical energy confinement scaling KSTAR-US collaboration (past) • US-KSTAR workshop at GA on May 2004 • Areas of interest (first priority of KSTAR)~$1.62M – Steady-state Technology ($14.3M) ($0.37M) – Control, Stability and AT modes($1.48M) ($0.35M) – Conventional Diagnostics ($ 6.5M) ($0.45M) – Advanced Diagnostics ($2.8M) ($0.2M) – Collaboratory ($1.25M)($0.25M) • US-KSTAR workshop 2005 at Daejeon (active work) • US-KSTAR workshop 2006 at Princeton – FY06 International Collaboration to prepare for KSTAR operation (Finals 04/06; $1352K total) – Total allocation for Institution: PPPL (~500k), GA (~400k), ORNL (~200k), LLNL (~20k), MIT(~40k) Columbia (~100k), Escalated KSTAR progress • US-KSTAR workshop (Sept, 2007), Dajeon, Korea – Korean National Assembly passed the Fusion Energy Developm ent Promotion Act on November 30, 2006. -

A European Success Story the Joint European Torus
EFDA JET JETJETJET LEAD ING DEVICE FOR FUSION STUDIES HOLDER OF THE WORLD RECORD OF FUSION POWER PRODUCTION EXPERIMENTS STRONGLY FOCUSSED ON THE PREPARATION FOR ITER EXPERIMENTAL DEVICE USED UNDER THE EUROPEAN FUSION DEVELOPEMENT AGREEMENT THE JOINT EUROPEAN TORUS A EUROPEAN SUCCESS STORY EFDA Fusion: the Energy of the Sun If the temperature of a gas is raised above 10,000 °C virtually all of the atoms become ionised and electrons separate from their nuclei. The result is a complete mix of electrons and ions with the sum of all charges being very close to zero as only small charge imbalance is allowed. Thus, the ionised gas remains almost neutral throughout. This constitutes a fourth state of matter called plasma, with a wide range of unique features. D Deuterium 3He Helium 3 The sun, and similar stars, are sphe- Fusion D T Tritium res of plasma composed mainly of Li Lithium hydrogen. The high temperature, 4He Helium 4 3He Energy U Uranium around 15 million °C, is necessary released for the pressure of the plasma to in Fusion T balance the inward gravitational for- ces. Under these conditions it is pos- Li Fission sible for hydrogen nuclei to fuse together and release energy. Nuclear binding energy In a terrestrial system the aim is to 4He U produce the ‘easiest’ fusion reaction Energy released using deuterium and tritium. Even in fission then the rate of fusion reactions becomes large enough only at high JG97.362/4c Atomic mass particle energy. Therefore, when the Dn required nuclear reactions result from the thermal motions of the nuclei, so-called thermonuclear fusion, it is necessary to achieve u • extremely high temperatures, of at least 100 million °C. -

TH/P8-21 Transport Simulations of KSTAR Advanced Tokamak
1 TH/P8-21 Transport Simulations of KSTAR Advanced Tokamak Scenarios Yong-Su Na 1), 2), C. E. Kessel 3), J. M. Park 4), J. Y. Kim 1) 1) National Fusion Research Institute, Daejeon, Korea 2) Department of Nuclear Engineering, Seoul National University, Seoul, Korea 3) Princeton Plasma Physics Laboratory, Princeton, NJ, USA 4) Oak Ridge National Laboratory, Oak Ridge, TN, USA e-mail contact of main author: [email protected] Abstract. Predictive modeling of KSTAR operation scenarios are performed with the aim of developing high performance steady state operation scenarios. Various transport codes are employed for this study. Firstly, steady state operation capabilities are investigated with time dependent simulations using a free-boundary transport code. Secondly, reproducibility of high performance steady state operation scenario from an existing tokamak to KSTAR is investigated using the experimental data from other tokamak device. Finally, capability of DEMO-relevant advanced tokamak operation is investigated in KSTAR. From those simulations, it is found that KSTAR is able to establish high performance steady state operation scenarios. The selection of the transport model and the current ramp up scenario is also discussed which have strong influence on target profiles. 1. Introduction As the fusion era is rapidly approaching, the necessity of development of steady state operation scenarios becomes more and more important, particularly for fusion reactor models based on the tokamak concept. In addition to the steady state operation, fusion performance of the tokamak needs to be improved compared with conventional H-modes for developing economically viable fusion power plants. In this context, the, so-called, advanced tokamak (AT) scenarios are being developed aiming at satisfying these two reactor requirements simultaneously. -

Energy Analysis for the Connection of the Nuclear Reactor DEMO to the European Electrical Grid
energies Article Energy Analysis for the Connection of the Nuclear Reactor DEMO to the European Electrical Grid Sergio Ciattaglia 1, Maria Carmen Falvo 2,* , Alessandro Lampasi 3 and Matteo Proietti Cosimi 2 1 EUROfusion Consortium, 85748 Garching, Germany; [email protected] 2 DIAEE—Department of Astronautics, Energy and Electrical Engineering, University of Rome Sapienza, 00184 Rome, Italy; [email protected] 3 ENEA Frascati, 00044 Frascati, Rome, Italy; [email protected] * Correspondence: [email protected] Received: 31 March 2020; Accepted: 22 April 2020; Published: 1 May 2020 Abstract: Towards the middle of the current century, the DEMOnstration power plant, DEMO, will start operating as the first nuclear fusion reactor capable of supplying its own loads and of providing electrical power to the European electrical grid. The presence of such a unique and peculiar facility in the European transmission system involves many issues that have to be faced in the project phase. This work represents the first study linking the operation of the nuclear fusion power plant DEMO to the actual requirements for its correct functioning as a facility connected to the power systems. In order to build this link, the present work reports the analysis of the requirements that this unconventional power-generating facility should fulfill for the proper connection and operation in the European electrical grid. Through this analysis, the study reaches its main objectives, which are the definition of the limitations of the current design choices in terms of power-generating capability and the preliminary evaluation of advantages and disadvantages that the possible configurations for the connection of the facility to the European electrical grid can have. -

NIAC 2011 Phase I Tarditti Aneutronic Fusion Spacecraft Architecture Final Report
NASA-NIAC 2001 PHASE I RESEARCH GRANT on “Aneutronic Fusion Spacecraft Architecture” Final Research Activity Report (SEPTEMBER 2012) P.I.: Alfonso G. Tarditi1 Collaborators: John H. Scott2, George H. Miley3 1Dept. of Physics, University of Houston – Clear Lake, Houston, TX 2NASA Johnson Space Center, Houston, TX 3University of Illinois-Urbana-Champaign, Urbana, IL Executive Summary - Motivation This study was developed because the recognized need of defining of a new spacecraft architecture suitable for aneutronic fusion and featuring game-changing space travel capabilities. The core of this architecture is the definition of a new kind of fusion-based space propulsion system. This research is not about exploring a new fusion energy concept, it actually assumes the availability of an aneutronic fusion energy reactor. The focus is on providing the best (most efficient) utilization of fusion energy for propulsion purposes. The rationale is that without a proper architecture design even the utilization of a fusion reactor as a prime energy source for spacecraft propulsion is not going to provide the required performances for achieving a substantial change of current space travel capabilities. - Highlights of Research Results This NIAC Phase I study provided led to several findings that provide the foundation for further research leading to a higher TRL: first a quantitative analysis of the intrinsic limitations of a propulsion system that utilizes aneutronic fusion products directly as the exhaust jet for achieving propulsion was carried on. Then, as a natural continuation, a new beam conditioning process for the fusion products was devised to produce an exhaust jet with the required characteristics (both thrust and specific impulse) for the optimal propulsion performances (in essence, an energy-to-thrust direct conversion). -

1 Looking Back at Half a Century of Fusion Research Association Euratom-CEA, Centre De
Looking Back at Half a Century of Fusion Research P. STOTT Association Euratom-CEA, Centre de Cadarache, 13108 Saint Paul lez Durance, France. This article gives a short overview of the origins of nuclear fusion and of its development as a potential source of terrestrial energy. 1 Introduction A hundred years ago, at the dawn of the twentieth century, physicists did not understand the source of the Sun‘s energy. Although classical physics had made major advances during the nineteenth century and many people thought that there was little of the physical sciences left to be discovered, they could not explain how the Sun could continue to radiate energy, apparently indefinitely. The law of energy conservation required that there must be an internal energy source equal to that radiated from the Sun‘s surface but the only substantial sources of energy known at that time were wood or coal. The mass of the Sun and the rate at which it radiated energy were known and it was easy to show that if the Sun had started off as a solid lump of coal it would have burnt out in a few thousand years. It was clear that this was much too shortœœthe Sun had to be older than the Earth and, although there was much controversy about the age of the Earth, it was clear that it had to be older than a few thousand years. The realization that the source of energy in the Sun and stars is due to nuclear fusion followed three main steps in the development of science. -
ITER Project for Fusion Energy
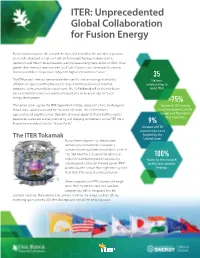
ITER: Unprecedented Global Collaboration for Fusion Energy Fusion reactions power the sun and the stars, and fusion has the potential to produce clean, safe, abundant energy on Earth. By fusing light hydrogen atoms such as deuterium and tritium, fusion reactions can produce energy gains about a million times greater than chemical reactions with fossil fuels. Fusion is not vulnerable to runaway reactions and does not produce long-term high-level radioactive waste. 35 The ITER project seeks to demonstrate the scientific and technological feasibility Nations of fusion energy by building the world’s largest and most advanced tokamak collaborating to magnetic confinement fusion experiment. The ITER tokamak will be the first fusion build ITER device to demonstrate a sustained burning plasma, an essential step for fusion energy development. >75% The United States signed the ITER Agreement in 2006, along with China, the European Portion of US funding Union, India, Japan, Korea, and the Russian Federation. The ITER members— invested domestically for representing 35 countries, more than 80% of annual global GDP, and half the world’s design and fabrication of components population—are now actively fabricating and shipping components to the ITER site in France for assembly of the first “star on Earth.” 9% Amount of ITER construction costs funded by the The ITER Tokamak United States Fusion thermal power has already been demonstrated in tokamaks; however, a sustained burning plasma has yet to be created. The ITER tokamak is designed to achieve an 100% industrial-scale burning plasma producing Access to the research 500 megawatts of fusion thermal power. -

Fusion: the Way Ahead
Fusion: the way ahead Feature: Physics World March 2006 pages 20 - 26 The recent decision to build the world's largest fusion experiment - ITER - in France has thrown down the gauntlet to fusion researchers worldwide. Richard Pitts, Richard Buttery and Simon Pinches describe how the Joint European Torus in the UK is playing a key role in ensuring ITER will demonstrate the reality of fusion power At a Glance: Fusion power • Fusion is the process whereby two light nuclei bind to form a heavier nucleus with the release of energy • Harnessing fusion on Earth via deuterium and tritium reactions would lead to an environmentally friendly and almost limitless energy source • One promising route to fusion power is to magnetically confine a hot, dense plasma inside a doughnut-shaped device called a tokamak • The JET tokamak provides a vital testing ground for understanding the physics and technologies necessary for an eventual fusion reactor • ITER is due to power up in 2016 and will be the next step towards a demonstration fusion power plant, which could be operational by 2035 By 2025 the Earth's population is predicted to reach eight billion. By the turn of the next century it could be as many as 12 billion. Even if the industrialized nations find a way to reduce their energy consumption, this unprecedented increase in population - coupled with rising prosperity in the developing world - will place huge demands on global energy supplies. As our primary sources of energy - fossil fuels - begin to run out, and burning them causes increasing environmental concerns, the human race faces the challenge of finding new energy sources. -

Modeling and Control of Plasma Rotation for NSTX Using
PAPER Related content - Central safety factor and N control on Modeling and control of plasma rotation for NSTX NSTX-U via beam power and plasma boundary shape modification, using TRANSP for closed loop simulations using neoclassical toroidal viscosity and neutral M.D. Boyer, R. Andre, D.A. Gates et al. beam injection - Topical Review M S Chu and M Okabayashi To cite this article: I.R. Goumiri et al 2016 Nucl. Fusion 56 036023 - Rotation and momentum transport in tokamaks and helical systems K. Ida and J.E. Rice View the article online for updates and enhancements. Recent citations - Design and simulation of the snowflake divertor control for NSTX–U P J Vail et al - Real-time capable modeling of neutral beam injection on NSTX-U using neural networks M.D. Boyer et al - Resistive wall mode physics and control challenges in JT-60SA high scenarios L. Pigatto et al This content was downloaded from IP address 128.112.165.144 on 09/09/2019 at 19:26 IOP Nuclear Fusion International Atomic Energy Agency Nuclear Fusion Nucl. Fusion Nucl. Fusion 56 (2016) 036023 (14pp) doi:10.1088/0029-5515/56/3/036023 56 Modeling and control of plasma rotation for 2016 NSTX using neoclassical toroidal viscosity © 2016 IAEA, Vienna and neutral beam injection NUFUAU I.R. Goumiri1, C.W. Rowley1, S.A. Sabbagh2, D.A. Gates3, S.P. Gerhardt3, M.D. Boyer3, R. Andre3, E. Kolemen3 and K. Taira4 036023 1 Department of Mechanical and Aerospace Engineering, Princeton University, Princeton, NJ 08544, USA I.R. Goumiri et al 2 Department of Applied Physics and Applied Mathematics,