Testing the Robustness of CIECAM02
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Colors and Fillstyle
GraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphicsGraphics andandandandandandandandandandandandandandandandandandandandandandandandandandandandandand TTTTTTTTTTTTTTTTTTETETETETETXETXETXETXETXETXETXETXEXEXEXEXEXEXEXEXEXEXEXEXEXEXEXEXEXEXXXXX Ordinary colors More colors Colorful Fill—in style Custom colors From one color to another Tricks Online L Part II – Graphics AT EX Tutorial PSTricks c 2002, 2003, The Indian T This document is generated by hyperref, pstricks, pdftricks and pdfscreen packages on an intel and is released under EX Users Group The Indian T pc pdf running Floor lppl T Trivandrum 695014, EX with iii, sjp http://www.tug.org.in gnu/linux Buildings,EX Users Cotton HillsGroup india 1/19 Ordinary colors More colors Fill—in style Custom colors From one color to another 2. Colorful Tricks Seeing the (ps)tricks so far, at least some of you may be wishing for a bit of color in the graphics. Here’s good news for such people: you can have your wish! PSTricks comes with a set of macros that provide a basic set of colors Online LAT X Tutorial and lets you define your own colors. However, it has some incompatibility with E the LATEX package color. However, David Carlisle has written a package pstcol Part II – Graphics which modifies the PSTricks color interface to work with LATEX colors. All of our examples in this chapter assumes that this package is loaded, using the PSTricks command \usepackage{pstcol} in the preamble. Note that this loads the pstricks package also, so that it need not be separately loaded. c 2002, 2003, The Indian TEX Users Group This document is generated by pdfTEX with hyperref, pstricks, pdftricks and pdfscreen packages on an intel pc running gnu/linux and is released under lppl The Indian TEX Users Group Floor iii, sjp Buildings, Cotton Hills Trivandrum 695014, india http://www.tug.org.in 2/19 Colorful Tricks 2.1. -

Applying CIECAM02 for Mobile Display Viewing Conditions
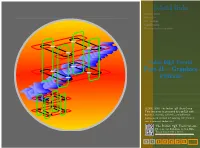
Applying CIECAM02 for Mobile Display Viewing Conditions YungKyung Park*, ChangJun Li*, M. R. Luo*, Youngshin Kwak**, Du-Sik Park **, and Changyeong Kim**; * University of Leeds, Colour Imaging Lab, UK*, ** Samsung Advanced Institute of Technology, Yongin, South Korea** Abstract Small displays are widely used for mobile phones, PDA and 0.7 Portable DVD players. They are small to be carried around and 0.6 viewed under various surround conditions. An experiment was carried out to accumulate colour appearance data on a 2 inch 0.5 mobile phone display, a 4 inch PDA display and a 7 inch LCD 0.4 display using the magnitude estimation method. It was divided into v' 12 experimental phases according to four surround conditions 0.3 (dark, dim, average, and bright). The visual results in terms of 0.2 lightness, colourfulness, brightness and hue from different phases were used to test and refine the CIE colour appearance model, 0.1 CIECAM02 [1]. The refined model is based on continuous 0 functions to calculate different surround parameters for mobile 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 displays. There was a large improvement of the model u' performance, especially for bright surround condition. Figure 1. The colour gamut of the three displays studied. Introduction Many previous colour appearance studies were carried out using household TV or PC displays viewed under rather restricted viewing conditions. In practice, the colour appearance of mobile displays is affected by a variety of viewing conditions. First of all, the display size is much smaller than the other displays as it is built to be carried around easily. -

Computational Color Harmony Based on Coloroid System
Computational Aesthetics in Graphics, Visualization and Imaging (2005) L. Neumann, M. Sbert, B. Gooch, W. Purgathofer (Editors) Computational Color Harmony based on Coloroid System László Neumanny, Antal Nemcsicsz, and Attila Neumannx yGrup de Gràfics de Girona, Universitat de Girona, and Institució Catalana de Recerca i Estudis Avançats, ICREA, Barcelona, Spain zBudapest University of Technology and Economics, Hungary xInstitute of Computer Graphics and Algorithms, Vienna University of Technology, Austria [email protected], [email protected], [email protected] (a) (b) Figure 1: (a) visualization of the overall appearance of a dichromatic color set with `caleidoscope' option of the Color Plan Designer software and (b) interactive color selection of a dichromatic color set in multi-layer mode, applying rotated regular grid. Abstract This paper presents experimentally based rules and methods for the creation of harmonic color sets. First, dichro- matic rules are presented which concern the harmony relationships of two hues. For an arbitrarily given hue pair, we define the just harmonic saturation values, resulting in minimally harmonic color pairs. These values express the fuzzy border between harmony and disharmony regions using a single scalar. Second, the value of harmony is defined corresponding to the contrast of lightness, i.e. the difference of perceptual lightness values. Third, we formulate the harmony value of the saturation contrast, depending on hue and lightness. The results of these investigations form a basis for a unified, coherent dichromatic harmony formula as well as for analysis of polychromatic color harmony. Introduced color harmony rules are based on Coloroid, which is one of the 5 6 main color-order systems and − furthermore it is an aesthetically uniform continuous color space. -

Accurately Reproducing Pantone Colors on Digital Presses
Accurately Reproducing Pantone Colors on Digital Presses By Anne Howard Graphic Communication Department College of Liberal Arts California Polytechnic State University June 2012 Abstract Anne Howard Graphic Communication Department, June 2012 Advisor: Dr. Xiaoying Rong The purpose of this study was to find out how accurately digital presses reproduce Pantone spot colors. The Pantone Matching System is a printing industry standard for spot colors. Because digital printing is becoming more popular, this study was intended to help designers decide on whether they should print Pantone colors on digital presses and expect to see similar colors on paper as they do on a computer monitor. This study investigated how a Xerox DocuColor 2060, Ricoh Pro C900s, and a Konica Minolta bizhub Press C8000 with default settings could print 45 Pantone colors from the Uncoated Solid color book with only the use of cyan, magenta, yellow and black toner. After creating a profile with a GRACoL target sheet, the 45 colors were printed again, measured and compared to the original Pantone Swatch book. Results from this study showed that the profile helped correct the DocuColor color output, however, the Konica Minolta and Ricoh color outputs generally produced the same as they did without the profile. The Konica Minolta and Ricoh have much newer versions of the EFI Fiery RIPs than the DocuColor so they are more likely to interpret Pantone colors the same way as when a profile is used. If printers are using newer presses, they should expect to see consistent color output of Pantone colors with or without profiles when using default settings. -

Iec 61966-2-4
This is a preview - click here to buy the full publication IEC 61966-2-4 Edition 1.0 2006-01 INTERNATIONAL STANDARD Multimedia systems and equipment – Colour measurement and management – Part 2-4: Colour management – Extended-gamut YCC colour space for video applications – xvYCC INTERNATIONAL ELECTROTECHNICAL COMMISSION PRICE CODE R ICS 33.160.40 ISBN 2-8318-8426-8 This is a preview - click here to buy the full publication – 2 – 61966-2-4 IEC:2006(E) CONTENTS FOREWORD...........................................................................................................................3 INTRODUCTION.....................................................................................................................5 1 Scope...............................................................................................................................6 2 Normative references .......................................................................................................6 3 Terms and definitions.........................................................................................................6 4 Colorimetric parameters and related characteristics .........................................................7 4.1 Primary colours and reference white........................................................................7 4.2 Opto-electronic transfer characteristics ...................................................................7 4.3 YCC (luma-chroma-chroma) encoding methods.......................................................8 -

246E9QSB/00 Philips LCD Monitor with Ultra Wide-Color
Philips LCD monitor with Ultra Wide-Color E Line 24 (23.8" / 60.5 cm diag.) Full HD (1920 x 1080) 246E9QSB Stunning color, stylish design The Philips E line monitor features stylish design with extraordinary picture performance. A narrow border Full HD display with Ultra Wide-Color brings you to real true-to-life visuals. Enjoy superior viewing in a stylish design. Superb Picture Quality • Ultra Wide-Color wider range of colors for a vivid picture • IPS LED wide view technology for image and color accuracy • 16:9 Full HD display for crisp detailed images Features designed for you • Narrow border display for a seamless appearance • Less eye fatigue with Flicker-free technology • LowBlue Mode for easy on-the-eyes productivity • EasyRead mode for a paper-like reading experience Greener everyday • Eco-friendly materials meet major international standards • Low power consumption saves energy bills LCD monitor with Ultra Wide-Color 246E9QSB/00 E Line 24 (23.8" / 60.5 cm diag.), Full HD (1920 x 1080) Highlights Ultra Wide-Color Technology 16:9 Full HD display a new solution to regulate brightness and reduce flicker for more comfortable viewing. LowBlue Mode Ultra Wide-Color Technology delivers a wider Picture quality matters. Regular displays deliver spectrum of colors for a more brilliant picture. quality, but you expect more. This display Ultra Wide-Color wider "color gamut" features enhanced Full HD 1920 x 1080 produces more natural-looking greens, vivid resolution. With Full HD for crisp detail paired Studies have shown that just as ultra-violet rays reds and deeper blues. -

Review of Measures for Light-Source Color Rendition and Considerations for a Two-Measure System for Characterizing Color Rendition
Review of measures for light-source color rendition and considerations for a two-measure system for characterizing color rendition Kevin W. Houser,1,* Minchen Wei,1 Aurélien David,2 Michael R. Krames,2 and Xiangyou Sharon Shen3 1Department of Architectural Engineering, The Pennsylvania State University, University Park, PA, 16802, USA 2Soraa, Inc., Fremont, CA 94555, USA 3Inno-Solution Research LLC, 913 Ringneck Road, State College, PA 16801, USA *[email protected] Abstract: Twenty-two measures of color rendition have been reviewed and summarized. Each measure was computed for 401 illuminants comprising incandescent, light-emitting diode (LED) -phosphor, LED-mixed, fluorescent, high-intensity discharge (HID), and theoretical illuminants. A multidimensional scaling analysis (Matrix Stress = 0.0731, R2 = 0.976) illustrates that the 22 measures cluster into three neighborhoods in a two- dimensional space, where the dimensions relate to color discrimination and color preference. When just two measures are used to characterize overall color rendition, the most information can be conveyed if one is a reference- based measure that is consistent with the concept of color fidelity or quality (e.g., Qa) and the other is a measure of relative gamut (e.g., Qg). ©2013 Optical Society of America OCIS codes: (330.1690) Color; (330.1715) Color, rendering and metamerism; (230.3670) Light-emitting diodes. References and links 1. CIE, “Methods of measuring and specifying colour rendering properties of light sources,” in CIE 13 (CIE, Vienna, Austria, 1965). 2. W. Walter, “How meaningful is the CIE color rendering index?” Light Design Appl. 11(2), 13–15 (1981). 3. T. Seim, “In search of an improved method for assessing the colour rendering properties of light sources,” Lighting Res. -

Color Measurement1 Agr1c Ü8 ,
I A^w /\PK4 1946 USDA COLOR MEASUREMENT1 AGR1C ü8 , ,. 2001 DEC-1 f=> 7=50 AndA ItsT ApplicationA rL '"NT SERIAL Í to the Grading of Agricultural Products A HANDBOOK ON THE METHOD OF DISK COLORIMETRY ui By S3 DOROTHY NICKERSON, Color Technologist, Producdon and Marketing Administration 50! es tt^iSi as U. S. DEPARTMENT OF AGRICULTURE Miscellaneous Publication 580 March 1946 CONTENTS Page Introduction 1 Color-grading problems 1 Color charts in grading work 2 Transparent-color standards in grading work 3 Standards need measuring 4 Several methods of expressing results of color measurement 5 I.C.I, method of color notation 6 Homogeneous-heterogeneous method of color notation 6 Munsell method of color notation 7 Relation between methods 9 Disk colorimetry 10 Early method 22 Present method 22 Instruments 23 Choice of disks 25 Conversion to Munsell notation 37 Application of disk colorimetry to grading problems 38 Sample preparation 38 Preparation of conversion data 40 Applications of Munsell notations in related problems 45 The Kelly mask method for color matching 47 Standard names for colors 48 A.S.A. standard for the specification and description of color 50 Color-tolerance specifications 52 Artificial daylighting for grading work 53 Color-vision testing 59 Literature cited 61 666177—46- COLOR MEASUREMENT And Its Application to the Grading of Agricultural Products By DOROTHY NICKERSON, color technologist Production and Marketing Administration INTRODUCTION cotton, hay, butter, cheese, eggs, fruits and vegetables (fresh, canned, frozen, and dried), honey, tobacco, In the 16 years since publication of the disk method 3 1 cereal grains, meats, and rosin. -

Specification of Srgb
How to interpret the sRGB color space (specified in IEC 61966-2-1) for ICC profiles A. Key sRGB color space specifications (see IEC 61966-2-1 https://webstore.iec.ch/publication/6168 for more information). 1. Chromaticity co-ordinates of primaries: R: x = 0.64, y = 0.33, z = 0.03; G: x = 0.30, y = 0.60, z = 0.10; B: x = 0.15, y = 0.06, z = 0.79. Note: These are defined in ITU-R BT.709 (the television standard for HDTV capture). 2. Reference display‘Gamma’: Approximately 2.2 (see precise specification of color component transfer function below). 3. Reference display white point chromaticity: x = 0.3127, y = 0.3290, z = 0.3583 (equivalent to the chromaticity of CIE Illuminant D65). 4. Reference display white point luminance: 80 cd/m2 (includes veiling glare). Note: The reference display white point tristimulus values are: Xabs = 76.04, Yabs = 80, Zabs = 87.12. 5. Reference veiling glare luminance: 0.2 cd/m2 (this is the reference viewer-observed black point luminance). Note: The reference viewer-observed black point tristimulus values are assumed to be: Xabs = 0.1901, Yabs = 0.2, Zabs = 0.2178. These values are not specified in IEC 61966-2-1, and are an additional interpretation provided in this document. 6. Tristimulus value normalization: The CIE 1931 XYZ values are scaled from 0.0 to 1.0. Note: The following scaling equations can be used. These equations are not provided in IEC 61966-2-1, and are an additional interpretation provided in this document. 76.04 X abs 0.1901 XN = = 0.0125313 (Xabs – 0.1901) 80 76.04 0.1901 Yabs 0.2 YN = = 0.0125313 (Yabs – 0.2) 80 0.2 87.12 Zabs 0.2178 ZN = = 0.0125313 (Zabs – 0.2178) 80 87.12 0.2178 7. -

Relationship of Solid Ink Density and Dot Gain in Digital Printing
International Journal of Engineering and Technical Research (IJETR) ISSN: 2321-0869, Volume-2, Issue-7, July 2014 Relationship of Solid Ink Density and Dot Gain in Digital Printing Vikas Jangra, Abhishek Saini, Anil Kundu gain while meeting density requirements. As discussed Abstract— Ours is the generation which is living in the age of above Dot gain is the measurement of the increase in tone science and technology. The latest scientific inventions have value from original file to the printed sheet. given rise to various technologies in every aspect of our life. Newer technologies have entered the field of printing also. II. MATERIALS AND METHODS Digital printing is one of these latest technologies which have further revolutionized entire modern printing industry in many Densitometer is used for measuring density of ink ways. It also facilitates working on large variety of surfaces, on the paper. Densitometer can be classified according to besides these factors digital printing have grown widely and type of materials they are designed to measure i.e. opaque made a special impact in print market. The presented analysis and transparent. Density of opaque materials is measured by system is used for study of print quality in Digital Printing. reflected light with a device called reflection type densitometer. Density of transparent materials is measured Index Terms— Digital Printing, Dot Gain, Solid ink density, by transmitted light with a device called transmission type Coated Paper and Uncoated Paper. densitometer. In order to measure the print quality i.e. solid ink density (SID) and dot gain (DG) on coated and uncoated I. -

Spectral Primary Decomposition for Rendering with RGB Reflectance
Eurographics Symposium on Rendering (DL-only Track) (2019) T. Boubekeur and P. Sen (Editors) Spectral Primary Decomposition for Rendering with sRGB Reflectance Ian Mallett1 and Cem Yuksel1 1University of Utah Ground Truth Our Method Meng et al. 2015 D65 Environment 35 Error (Noise & Imprecision) Error (Color Distortion) E D CIE76 0:0 Lambertian Plane Figure 1: Spectral rendering of a texture containing the entire sRGB gamut as the Lambertian albedo for a plane under a D65 environment. In this configuration, ideally, rendered sRGB pixels should match the texture’s values. Prior work by Meng et al. [MSHD15] produces noticeable color distortion, whereas our method produces no error beyond numerical precision and Monte Carlo sampling noise (the magnitude of the DE induced by this noise varies with the image because sRGB is perceptually nonlinear). Contemporary work [JH19] is also nearly able to achieve this, but at a significant implementation and memory cost. Abstract Spectral renderers, as-compared to RGB renderers, are able to simulate light transport that is closer to reality, capturing light behavior that is impossible to simulate with any three-primary decomposition. However, spectral rendering requires spectral scene data (e.g. textures and material properties), which is not widely available, severely limiting the practicality of spectral rendering. Unfortunately, producing a physically valid reflectance spectrum from a given sRGB triple has been a challenging problem, and indeed until very recently constructing a spectrum without colorimetric round-trip error was thought to be impos- sible. In this paper, we introduce a new procedure for efficiently generating a reflectance spectrum from any given sRGB input data. -

NFP Brand Guide At-A-Glance
NFP Brand Guide At-A-Glance Communication tools to keep your conversations growing. At-A-Glance Brand Guidelines Page 2 Clear Space Always maintain a minimum area of clear space around the NFP logo. This area is equal to the height of the nexus symbol as shown to the right. Do not let anything infringe upon this space. Minimum Size = x 1x Print Minimum Digital Minimum 1x 1x 1x 0.75˝ 90px Signature Color Use NFP Green – PANTONE® 363C (RGB 170/208/149) – whenever possible. When you can’t use NFP Green – on forms and limited color communications – use black. The logo can also be reversed out to white for use on solid and dark backgrounds. The reversed logo should not be used on complex backgrounds or a background without sufficient contrast. Logo Do Nots Changing the NFP logo in any way weakens its impact and our brand strength, and detracts from the consistent image we want to project. The examples below are not exhaustive, but help demonstrate what not to do. Don’t use an older version Don’t redraw any of our Signature. elements. Don’t modify or change Don’t add a stroke. the color. Don’t place on complex Don’t add effects or backgrounds. drop shadows. Don’t create lockups with Don’t use our Signature any other logos. How cares... as a “read through.” Acme Brothers Don’t modify the letter forms or use another Don’t distort the logo. NFP typeface. Don’t use the full- Don’t add graphics color logo on colored or drawings.