Braking Performance of Motorcyclists
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Braking Force
association adilca www.adilca.com THE BRAKING FORCE From the point of view of driving, emergency braking is probably the most difficult skill to perform. Yet it is an essential skill because, according to the Highway Code, only braking allows the driver to remain in control of one’s car. What does physics teach us about braking? What should be measured? What can be calculated? What about the braking force, this particular force without which nothing would be possible? What do we know about it? Here are some answers. Braking tests If you want to explore the secrets of braking, tests involving a driver, a modern car and a test track are necessary. The few measures will then be used for various calculations. This kind of test is regularly organized by automotive testers, and the obtained results have much to teach us. But to guarantee reliable measures, how is it necessary to proceed? And what do we have to measure? Choose the right track! At first, what track to choose? It must obey the some characteristics: a flat road, a long straight line without slope or banking, stocked with uniform cover, an asphalt of last generation if you wish to measure maximal performance of braking. The car must be recent, in good mechanical condition and entrusted to a driver able to brake efficiently (not so frequent it seems!). A passenger is required to balance the masses. Let’s go! A classic method: the decametre! The more traditional method is to measure the initial speed of the car and the braking distance. -

Speed and Space Management
T OOLBOXTOPICS.COM C AUTION CAUTION CAUTION C AUTION C AUTION Location Trainer Date SPEED AND SPACE MANAGEMENT Proper speed management means operating at the appropriate speed for all road conditions. Proper space management means maintaining enough space around your vehicle to operate safely. This article focuses on the importance of managing vehicle speed and space in order to deal with the ever- changing conditions on the road. Speed & Stopping Distance There are four factors involved in stopping a vehicle — perception distance, reaction distance, brake lag distance, and braking distance. Perception Distance — Perception distance is the distance a vehicle travels from the time you see a hazard until your brain recognizes it. The perception time for an alert driver is approximately ¾ of a second. At 55 mph a vehicle travels about 60 feet in ¾ of a second. Reaction Distance — Reaction distance is the distance a vehicle travels from the time your brain tells your foot to move from the accelerator until your foot hits the brake pedal. The average driver has a reaction time of ¾ of a second. At 55 mph that accounts for another ¾ of a second and another 60 feet traveled. Brake Lag Distance — When operating a vehicle with air brakes, it takes about ½ of a second for the mechanical operation to take place. Braking Distance — Braking distance is the distance it takes a vehicle to stop once the brakes are applied. Braking distance is affected by weight, length, and speed of the vehicle as well as road condition. A heavy vehicle's components (brakes, tires, springs, etc.) are designed to work best when a vehicle is fully loaded. -
Highway Design Distances.Backup
Introduction to Transportation Engineering Discussion of Stopping and Passing Distances Dr. Antonio A. Trani Professor of Civil and Environmental Engineering Virginia Polytechnic Institute and State University Blacksburg, Virginia Fall, Spring 2009 Virginia Tech 1 Introductory Remarks • The presentation of the materials that follow are taken from the American Association of State and Highway Officials (AASHTO): • “A Policy on Geometric Design of Highways and Streets - 2004” • This text is the standard material used by transportation engineering to design highways and streets Virginia Tech 2 Driver Performance • The human-machine system • The driver • Perception and reaction • Vehicle kinematic equations • Acceleration and deceleration problems • Stopping distance criteria • Passing sight distance criteria • Examples Virginia Tech 3 Human Machine Systems • Complex human-machine behavior in transportation engineering • Some examples: • Air traffic controllers interacting with pilots who in turn control aircraft • Highway drivers maneuvering at high speeds in moderate congestion and bad weather • A train engineer following train control signals at a busy train depot Virginia Tech 4 Sample Problem • Driving behavioral models are perhaps the easiest to understand Driver Strategy: control, guidance, and navigation Virginia Tech 5 The Driver • Transportation engineers deal with large numbers of drivers Elderly Middle age Young Handicapped, etc. • Design standards cannot be predicated on the basis of the “average driver” • In-class discussion • Example of reaction time study Virginia Tech 6 Anecdotal Experience About Drivers • Drivers do not like more than 0.3 g of lateral acceleration at low speeds (< 30 m.p.h.) • No more than 0.1 g at 60 m.p.h. • Human factor issues in highway design: a) As speed increases so does visual concentration b) As speed increases, the focus of visual concentration changes (600 ft. -

BAYESIAN RECONSTRUCTION of TRAFFIC ACCIDENTS 71 at the Start of the Skid As 17·8 Meters/Sec
Law, Probability and Risk (2003) 2, 69–89 Bayesian reconstruction of traffic accidents GARY A. DAV I S† Department of Civil Engineering, University of Minnesota, 122 CivE, 500 Pillsbury Drive SE, Minneapolis, MN 55455, USA [Received on 20 January 2003; revised on 17 April 2003; accepted on 9 May 2003] Traffic accident reconstruction has been defined as the effort to determine, from whatever evidence is available, how an accident happened. Traffic accident reconstruction can be treated as a problem in uncertain reasoning about a particular event, and developments in modeling uncertain reasoning for artificial intelligence can be applied to this problem. Physical principles can usually be used to develop a structural model of the accident and this model, together with an expert assessment of prior uncertainty regarding the accident’s initial conditions, can be represented as a Bayesian network. Posterior probabilities for the accident’s initial conditions, given evidence collected at the accident scene, can then be computed by updating the Bayesian network. Using a possible worlds semantics, truth conditions for counterfactual claims about the accident can be defined and used to rigorously implement a ‘but for’ test of whether or not a speed limit violation could be considered a cause of an accident. The logic of this approach is illustrated for a simplified version of a vehicle/pedestrian accident, and then the approach is applied to four actual accidents. Keywords: possible worlds; accident reconstruction; Bayes networks; Markov chain Monte Carlo; forensic inference. Limited creatures that we are, we often find ourselves having to base decisions on less than complete information. -
SECTION 5 Negative Acceleration: Braking Your Automobile
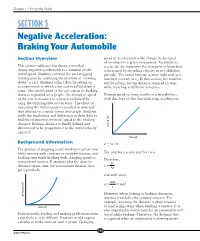
Chapter 1 Driving the Roads SECTION 5 Negative Acceleration: Braking Your Automobile Section Overview speed or acceleration is the change in the speed of an object in a given time period. Acceleration, This section addresses the distance traveled avt=Δ Δ (Δv represents the change in velocity that during negative acceleration as a function of the is measured by recording velocity at two different initial speed. Students continue the cart-stopping periods). The initial velocity is often indicated as v1 investigation by analyzing the problem of “slowing and fi nal velocity as v2. In this section, the students down” a cart. Students collect data by setting up will be solving for the distance required to stop, an experiment in which a toy cart is rolled down a while traveling at different velocities. ramp. The initial speed of the cart versus its braking distance is plotted on a graph. The change in speed Plotting speed vs. time, results in a straight line, of the cart as it comes to a stop is explained by with the slope of that line indicating acceleration. using the term negative acceleration. The effect of increasing the initial speed is recorded as data and then plotted on a speed versus time graph. Students study the similarities and differences in their data to ) fi nd the relationship of initial speed to the braking v distance. Braking distance is fi nally defi ned and determined to be proportional to the initial velocity speed ( squared. time (t) Background Information avt=Δ Δ The physics of stopping a cart involves reaction time while moving with constant or uniform motion, and The unit for v is m/s and for t is s. -

Development and Investigation of Fade Stop Brake Cooler in Automobiles
International Journal of Pure and Applied Mathematics Volume 119 No. 7 2018, 899-904 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu Special Issue ijpam.eu DEVELOPMENT AND INVESTIGATION OF FADE STOP BRAKE COOLER IN AUTOMOBILES M.Suresha*, K.Balasubramaniana, Rajakumar S Raia, S.Mohanasundarama, S.J.Vijaya a*&a Assistant Professor, Department of Mechanical Engineering, Karunya Institute of Technology and Sciences, Coimbatore -641114, Tamil nadu, India. *Corresponding Authors E-mail: [email protected] Abstract friction. The cooling of the brakes dissipates the heat Several brakes which is used to stop the vehicles and the vehicle slows down. It's the First Law of but the disc brake is a one of the braking mechanism Thermodynamics, sometimes known as the law of which is used for slowing or stopping the rotation of a conservation of energy. This states that energy cannot wheel under dynamic situation. A brake disc is be created nor destroyed; it can only be converted from connected to the wheel or the axle. To stop the wheel, one form to another. In the case of brakes, it is friction material in the form of brake pads (mounted converted from kinetic energy to thermal energy on a device called a brake caliper) is forced Because of the configuration of the brake pads and mechanically hydraulically, pneumatically or rotor[1-2] in a disc brake, the location of the point of electromagnetically against both sides of the contact where the friction is generated also provides a disc. Friction reasons the disc and attached wheel to mechanical moment to resist the turning motion of the gradual or stop. -

Ten Surprising Findings About Winter Tires: It Is Not Just About Snow
SWT-2016-10 JULY 2016 TEN SURPRISING FINDINGS ABOUT WINTER TIRES: IT IS NOT J UST ABOUT SNOW JOHN WOODROOFFE SUSTAINABLE WORLDWIDE TRANSPORTATION TEN SURPRISING FINDINGS ABOUT WINTER TIRES: IT IS NOT JUST ABOUT SNOW John Woodrooffe The University of Michigan Sustainable Worldwide Transportation Ann Arbor, Michigan 48109-2150 U.S.A. Report No. SWT-2016-10 July 2016 Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipientʼs Catalog No. SWT-2016-10 4. Title and Subtitle 5. Report Date Ten Surprising Findings About Winter Tires: It Is Not Just About July 2016 Snow 6. Performing Organization Code 383818 7. Author(s) 8. Performing Organization Report No. John Woodrooffe SWT-2016-10 9. Performing Organization Name and Address 10. Work Unit no. (TRAIS) The University of Michigan Sustainable Worldwide Transportation 11. Contract or Grant No. 2901 Baxter Road Ann Arbor, Michigan 48109-2150 U.S.A. 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered The University of Michigan Sustainable Worldwide Transportation 14. Sponsoring Agency Code 15. Supplementary Notes Information about Sustainable Worldwide Transportation is available at http://www.umich.edu/~umtriswt. 16. Abstract This report explores the safety performance of winter tires in the context of vehicle braking, cornering and loss of control. It examines tire certification, the influence of winter tires on crash frequency, and how they perform on four-wheel drive vehicles compared with two-wheel drive vehicles. The report considers winter-tire requirements for connected and automated vehicles and documents legislative and incentive programs implemented within North America (Canada) to encourage the use of winter tires. -
Heavy Vehicle Braking Using Friction Estimation for Controller Optimization
DEGREE PROJECT IN VEHICLE ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2017 Heavy Vehicle Braking using Friction Estimation for Controller Optimization DIMITRIOS KALAKOS BERNHARD WESTERHOF KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ENGINEERING SCIENCES Heavy Vehicle Braking using Friction Estimation for Controller Optimization Master's thesis in Applied Mechanics BERNHARD WESTERHOF DIMITRIOS KALAKOS Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems, Vehicle Dynamics group Chalmers University of Technology Abstract In this thesis project, brake performance of heavy vehicles is improved by the development of new wheel-based functions for a longitudinal slip control braking system using novel Fast Acting Braking Valves (FABVs). To achieve this goal, Volvo Trucks' vehicle dynamics model has been extended to incorporate the FABV system. After validating the updated model with experimental data, a slip-slope based recursive least squares friction estimation algorithm has been implemented. Using information about the tire-road friction coefficient, the sliding mode slip controller has been made adaptive to different road surfaces by implementing a friction- dependent reference slip signal and switching gain for the sliding mode controller. This switching gain is further optimized by means of a novel on-line optimization algorithm. Simulations show that the on-line friction estimation converges close to the reference friction level within one second for hard braking. Furthermore, using this information -
Evaluating Relationships Between Perception-Reaction Times, Emergency Deceleration Rates, and Crash Outcomes Using Naturalistic Driving Data
MPC 17-338 | J. Wood and S. Zhang Evaluating Relationships Between Perception- Reaction Times, Emergency Deceleration Rates, and Crash Outcomes Using Naturalistic Driving Data A University Transportation Center sponsored by the U.S. Department of Transportation serving the Mountain-Plains Region. Consortium members: Colorado State University University of Colorado Denver Utah State University North Dakota State University University of Denver University of Wyoming South Dakota State University University of Utah Evaluating Relationships Between Perception-Reaction Times, Emergency Deceleration Rates, and Crash Outcomes Using Naturalistic Driving Data Jonathan Wood, PhD South Dakota State University Phone: (435) 760-2781 Email: [email protected] Shaohu Zhang South Dakota State University Email: [email protected] December 2017 Acknowledgments The Mountain-Plains Consortium (MPC) and South Dakota State University (SDSU) funded this research. Virginia Tech University (VTU) provided the data used in the analysis. Disclaimer The contents of this report reflect the views of the authors, who are responsible for the facts and the accuracy of the information presented. This document is disseminated under the sponsorship of the Department of Transportation, University Transportation Centers Program, in the interest of information exchange. The U.S. Government assumes no liability for the contents or use thereof. NDSU does not discriminate in its programs and activities on the basis of age, color, gender expression/identity, genetic information, marital status, national origin, participation in lawful off-campus activity, physical or mental disability, pregnancy, public assistance status, race, religion, sex, sexual orientation, spousal relationship to current employee, or veteran status, as applicable. Direct inquiries to: Vice Provost, Title IX/ADA Coordinator, Old Main 201, 701-231-7708, [email protected]. -

Traffic Collision Reconstruction Course Outline
San Bernardino County Sheriff’s Department Traffic Collision Reconstruction Course Course Outline I. Introduction and Orientation A. Registration 1. Sign-in 2. Payments B. Orientation 1. Restrooms 2. Breaks C. Introduction 1. Instructor introductions D. Equipment 1. Scientific Calculator 2. Drafting Equipment a. Traffic template b. Flex curve c. Engineers ruler d. Protractor e. Compass f. Pencil g. Eraser h. Parallel rulers E. Recommended txt 1. Traffic Accident Reconstruction Manual (Volume 2, The Traffic Accident Investigation Manual), Lynn B. Fricke, Northwestern University Traffic Institute. F. Course goals 1. To provide a means of gaining the knowledge, skill, and experience necessary to interpret the evidence available in a traffic collision. 2. To enhance the level of understanding and cultivate the ability to express complex concepts in a clear and concise language. 3. To become familiar with the current trends in Traffic Collision Reconstruction and experiment with these techniques and methodologies in a controlled environment. II. Mathematics and Physics Review A. Mathematics 1. Basic mathematics (hierarchy) 2. Review of algebra and right-angle trigonometry 3. Trigonometry B. Physics 1. Newton’s Laws of Motion a. First law of motion b. Second law of motion c. Third law of motion 2. Physics definition of acceleration and velocity 3. Mass and weight Page 1 of 7 San Bernardino County Sheriff’s Department Traffic Collision Reconstruction Course Course Outline a. Definition of relationships b. Concept of center of gravity 4. Work – Kinetic energy relationship 5. Impulse and momentum a. Derived b. Definition c. Examples of application to vehicle collisions 6. Friction a. Physics definition b. -

A Real-Life Example Using Quadratic Equations
Document ID: 12_31_11_1 Date Received: 2011-12-31 Date Revised: 2012-03-03 Date Accepted: 2012-04-11 Curriculum Topic Benchmarks: M8.4.11, M8.4.15, M8.4.25, M8.4.28, S11.4.2, S12.4.6, S12.4.7 Grade Level: High School (9-12) Subject Keywords acceleration, algebra, distance, energy, equations, estimation, motion, proportion, quadratic equations Why Tailgating on Freeways is Unsafe: A Real-life Example Using Quadratic Equations By: Ramakrishnan Menon, Georgia Gwinnett College, email: [email protected] From: The PUMAS Collection http://pumas.nasa.gov © 2012 Practical Uses of Math and Science. ALL RIGHTS RESERVED. Based on U.S. Govt. sponsored research “When are we ever going to use this?” is a question teachers usually face when teaching math, especially when teaching topics such as the quadratic equation. Science teachers, too, face such questions, but generally not to the same extent as math teachers. Here, we will discuss one use of the quadratic equation, and also indicate some other factors (including science related factors) that also need to be taken into account to give a more accurate/appropriate solution. Specifically, we discuss how to use a quadratic equation to compute the stopping distance of a car traveling at a given speed, and then discuss other ways to compute the stopping distance. First, a review of some equations of motion is in order. Although it is true that that these equations are strictly true for particles under constant acceleration and where motion is constrained to a straight line, it is common to approximate real life situations with mathematical models based on ideal situations and come to reasonably appropriate solutions. -

6. Calculated Airplane Stopping Distances Based on Test Results
6. CALCULATED AIRPLANE STOPPING DISTANCES BASED ON TEST RESULTS NASA Langley Research SUMMARY Data are presented from an analytical study made to predict improvements in adverse-weather landing and balanced take-off field performance levels for transversely grooved runways. The results indicate that the use of the landing-research-runway transverse-groove configuration (l-inch pitch by 1/4-inch width by 1/4-inch depth) effec- tively reduces landing field lengths for the Convair 990A and McDonnell Douglas F-4D airplanes under adverse weather conditions on a variety of runway surfaces. In addition, essentially dry balanced field take-off performance is attainable for grooved runway surfaces in a wet and puddled condition, since grooving increases the critical engine-failure speed to practically dry-surface values. Only slight reductions in balanced field lengths are provided by grooving for take-offs from slush-covered runways. INTRODUCTION Recent airplane braking research programs conducted by the National Aeronautics and Space Administration have shown that pavement grooving is an effective means of producing higher friction levels for airplanes involved in adverse -weather runway opera- tions (ref. 1). The braking programs were conducted with 990A and F-4D.airplanes on the landing research runway at Wallops Station, Virginia. The purpose of this paper is to indicate the eff s of transverse runway grooving on airplane ground operating distances for the 990A F-4D. The results were obtained from an analytical study made to determine all-weather landing and balanced take-off field lengths for hypothetical operations from ungrooved and grooved concrete and as runways of various surface textures.