Institutionen För Systemteknik Department of Electrical Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

“WW 2,873,387 United States Patent Rice Patented Feb
Feb. 10, 1959 M. c. KIDD 2,873,387 CONTROLLABLE.‘ TRANSISTOR CLIPPING CIRCUIT Filed Dec. 17, '1956 INVENTOR. v MARSHALL [.KIDD “WW 2,873,387 United States Patent rice Patented Feb. 10, 1959. 2 tap 34 on a second source of energizing potential, here illustrated as a battery 30, through a load resistor 32. 2,873,387 The battery 30 has a ground tap 31 at an intermediate point thereon, and the variable tap 34 allows the ener CONTROLLABLE TRANSISTOR CLIPPING gizing potential supplied to the collector electrode 14 to cmcurr be varied from a positive to a negative value. Output Marshall vC. Kidd, Haddon Heights, N. J., assignor to signals are derived between an output terminal 36, which Radio Corporation of America, a corporation of Dela is connected directly to the collector electrode 14 of the ware ‘ ‘ transistor 16, and a ground terminal 37. One type of 10 clipped or limited output signal that is available at the Application December 17, 1956, Serial No. 628,807 output terminals 36 is illustrated by the waveform 38, 5 ‘Claims. (Cl. 307-885) and the manner in which it is derived is hereinafter de scribed. , In order to describe the operation of the circuit, as This invention relates to signal translating circuits and 15 sume that the variable tap 34 on the battery 30 is set more particularly to transistor circuits for limiting or so that a small positive voltage, negative, however, with clipping a translated signal; - respect to base electrode voltage, appears on the collector In many types of electronic equipment, such as tele electrode 14, and that a sine wave is applied to the input vision, radar, computer and like equipment, it may be terminal 10, as illustrated by the waveform 18. -
Tektronix Cookbook of Standard Audio Tests
( Copyright © 1975, Tektronix, Inc. AI! rig hts re served P ri nt ed· in U .S.A. ForeIg n and U .S.A. Products of Tektronix , Inc. are covered by Fore ign and U .S.A . Patents and /o r Patents Pending. Inform ation in thi s publi ca tion supersedes all previously published material. Specification and price c hange pr ivileges reserve d . TEKTRON I X, SCOPE-MOBILE, TELEOU IPMENT, and @ are registered trademarks of Tekt ro nix, Inc., P. O. Box 500, Beaverlon, Oregon 97077, Phone : (Area Code 503) 644-0161, TWX : 910-467-8708, Cabl e : TEKTRON IX. Overseas Di stributors in over 40 Counlries. 1 STANDARD AUDIO TESTS BY CLIFFORD SCHROCK ACKNOWLEDGEMENTS The author would like to thank Linley Gumm and Gordon Long for their excellent technical assistance in the prepara tion of this paper. In addition, I would like to thank Joyce Lekas for her editorial assistance and Jeanne Galick for the illustrations and layout. CONTENTS PRELIMINARY INFORMATION Test Setups ________________ page 2 Input- Output Load Matching ________ page 3 TESTS Power Output _______________ page 4 Frequency Response ____________ page 5 Harmonic Distortion _____________ page 7 Intermodulation Distortion __________ page 9 Distortion vs Output _____________ page 11 Power Bandwidth page 11 Damping Factor page 12 Signal to Noise Ratio page 12 Square Wave Response page 15 Crosstalk page 16 Sensitivity page 16 Transient Intermodulation Distortion page 17 SERVICING HINTS___________ page19 PRELIMINARY INFORMATION Maintaining a modern High-Fidelity-Stereo system to day requires much more than a "trained ear." The high specifications of receivers and amplifiers can only be maintained by performing some of the standard measure ments such as : 1. -

Topaz Sr10 / Sr20 Stereo Receivers Top-Tips
TOPAZ SR10 / SR20 STEREO RECEIVERS TOP-TIPS Incredible performance, connectivity and value for money… The most powerful amplifiers in the Topaz range are designed to on the back allow you to connect traditional sources such as be the heart of your separates hi-fi system. The SR10 offers a CD players and even Blu-ray players. Thanks to a high quality room-filling 85 watts per channel and is backed by a dedicated Wolfson DAC, the SR20 goes one step further and provides three subwoofer output as well as two sets of speaker outputs - so you additional digital audio inputs, allowing the connection of digital can listen in two rooms at once or bi-wire your main speakers for sources such as streamers, TVs or set top boxes. a true audiophile performance. The SR20 steps things up a notch The SR10 and SR20’s playback capabilities also include a built- by offering the same flexible connectivity, but with an even more in FM/AM tuner, giving you access to all of your favourite radio powerful 100 watts per channel, driving virtually any loudspeaker stations with ease. We only use pure audiophile components, including discreet However you listen to your music, the SR10 and SR20 have it amplifiers, full metal chassis’ and high-performance toroidal covered. They boast a built-in phono stage so you can instantly transformers. The Topaz SR10 and SR20 are a winning connect a turntable, and a direct front panel input for iPods, combination of power, connectivity and purity, putting far more smart phones or MP3 players. -
Amplifier Clipping
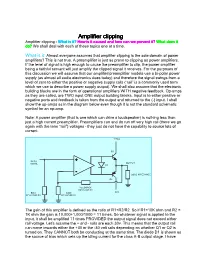
Amplifier clipping Amplifier clipping – What is it? How is it caused and how can we prevent itit???? What does it do? We shall deal with each of these topics one at a time. What is it: Almost everyone assumes that amplifier clipping is the sole domain of power amplifiers? This is not true. A preamplifier is just as prone to clipping as power amplifiers. If the level of signal is high enough to cause the preamplifier to clip, the power amplifier being a faithful servant will just amplify the clipped signal it receives. For the purposes of this discussion we will assume that our amplifier/preamplifier models use a bi-polar power supply (as almost all audio electronics does today) and therefore the signal swings from a level of zero to either the positive or negative supply rails (“rail” is a commonly used term which we use to describe a power supply output). We shall also assume that the electronic building blocks are in the form of operational amplifiers WITH negative feedback. Op-amps as they are called, are TWO input ONE output building blocks. Input is to either positive or negative ports and feedback is taken from the output and returned to the (-) input. I shall show the op-amps as in the diagram below even though it is not the standard schematic symbol for an op-amp. Note: A power amplifier (that is one which can drive a loudspeaker) is nothing less than just a high current preamplifier. Preamplifiers can and do run off very high rail (there we go again with the term “rail”) voltages – they just do not have the capability to source lots of current. -

Aliasing Reduction in Clipped Signals
This is an electronic reprint of the original article. This reprint may differ from the original in pagination and typographic detail. Author(s): Fabián Esqueda, Stefan Bilbao and Vesa Välimäki Title: Aliasing reduction in clipped signals Year: 2016 Version: Author accepted / Post print version Please cite the original version: Fabián Esqueda, Stefan Bilbao and Vesa Välimäki. Aliasing reduction in clipped signals. IEEE Transactions on Signal Processing, Vol. 64, No. 20, pp. 5255-5267, October 2016. DOI: 10.1109/TSP.2016.2585091 Rights: © 2016 IEEE. Reprinted with permission. In reference to IEEE copyrighted material which is used with permission in this thesis, the IEEE does not endorse any of Aalto University's products or services. Internal or personal use of this material is permitted. If interested in reprinting/republishing IEEE copyrighted material for advertising or promotional purposes or for creating new collective works for resale or redistribution, please go to http://www.ieee.org/publications_standards/publications/rights/rights_link.html to learn how to obtain a License from RightsLink. This publication is included in the electronic version of the article dissertation: Esqueda, Fabián. Aliasing Reduction in Nonlinear Audio Signal Processing. Aalto University publication series DOCTORAL DISSERTATIONS, 74/2018. All material supplied via Aaltodoc is protected by copyright and other intellectual property rights, and duplication or sale of all or part of any of the repository collections is not permitted, except that material may be duplicated by you for your research use or educational purposes in electronic or print form. You must obtain permission for any other use. Electronic or print copies may not be offered, whether for sale or otherwise to anyone who is not an authorised user. -

“Flawless Audiophile Performance and a Design with The
Mc501 Monoblock Power Amplifier The MC501 Monoblock Power Amplifier has been designed to meet the expectations of “flawless audiophile the most demanding audiophile. Delegating an individual amplifier to each speaker eliminates any chance of interaction between channels and expanding into multi-channel performance and a formats is as easy as adding additional amplifiers. design with the future Quad-Differential Circuitry, exclusive to McIntosh, reduces noise and distortion to their in mind” lowest possible level. While the MC501 delivers a massive 500 watts continuous power Quad Balanced Design into 2, 4 or 8-Ohms and over 1200 watts of peak power into low impedances, its noise levels are 124dB below rated output. This means that the MC501 combines super-high Exclusive McIntosh Power Assurance System power with record-low levels of noise…nearly an impossible combination! High Output Current Capability The MC501 has a bold look yet is unmistakably a McIntosh. It features a 2-dimensional Wide Bandwidth glass front panel containing a large peak-responding true-wattmeter, all illuminated with cool running, ultra long-life LED fiber-optic lighting. The chassis gleams in polished stain- Fiber-Optic Illuminated 3D Glass Front Panel less steel and vertically mounted connectors at the back make attaching cables easier and takes up less shelf space. Both unbalanced and balanced inputs are provided along with three sets of huge, gold-plated speaker binding posts for high-performance speaker cables. l e g e n d a r y Mc501 Monoblock Power Amplifier EXCLUSIVE MCINTOSH POWER ASSURANCE SYSTEM A collection of technologies that enhance performance and reliability while protecting the amplifier and loudspeakers. -

Guitar Effects System
Guitar Effects System 6.101 Final Project Spring 2020 Matt Johnston Table of Contents Overview ……………………………………… 1 Pedals Compression …………………………... 3 Overdrive ……………………………… 5 4-Band Equalization …………………... 7 PCB Layout …………………………………… 8 Lessons Learned ………………………………. 9 Conclusion ……………………………………. 10 1 Overview The design of the guitar pedal was motivated by the history of rock ‘n’ roll. When people first began playing electric guitar in the 1930’s, there were no specialized guitar amplifiers, so they simply hooked up the electrical signal from the guitar to an audio amplifier that would have otherwise been used for vocals. Thus, the sound that came from these speakers would be clean and accurate, which is great for vocals, but guitarists wanted to get more from their instruments. Using the early tube-style amplifiers, guitar players would turn up the volume all the way in order to force the output audio waveform beyond the limits of the amplifier, resulting in clipping of the waveform and a “crunchy” sound characteristic of rock music. While players loved the overdriven effect they achieved by turning the amp “up to 11,” this technique posed a risk of breaking the tubes in the amp and also resulted in a lot of angry neighbors. Moreover, as guitar and amplifier technology developed throughout the 1950’s and 1960’s, many amplifiers featured additional built-in effects such as reverb, vibrato, and echo. These effects gave guitarists access to a new mode of creativity, but the technology was cumbersome to use and often lacked the quality necessary to be put in to practice in a studio or live performance setting. -

Restoration of Clipped Sound Signals - a Weighted Fourier Series and AR Approach
KTH May 19, 2013 Restoration of clipped sound signals - a weighted Fourier series and AR approach A bachelor thesis on Optimization Anders Gidmark Helena Olofson [email protected] [email protected] Supervisor: Per Enqvist SA104X Degree Project in Engineering Physics, First Level Department of Mathematics, Optimization and Systems Theory Royal Institute of Technology (KTH) Stockholm, Sweden Abstract Sound signals can be distorted in many dierent ways, one of them is called clipping. A clipped sound signal diers from a non-clipped signal in the way that the amplitudes of the sound wave that are higher than a certain amplitude threshold has been partially lowered or completely lowered to the threshold, the latter is called hard clipping. Since data is lost when a signal is clipped, there is an interest in restoring the signal. For a hard clipped signal, it is often impossible to perfectly restore the signal. In this thesis two dierent methods for partially restoring a symmetrically hard clipped signal are suggested. The two methods considered are a weighted Fourier series (WFS) t and an autoregressive (AR) model approach. Both methods attempt to restore the signal by solving optimization problems designed to min- imize the errors of the respective model. Evaluation and comparison of the two methods showed that the AR method typically performed better than the WFS method. The AR method was eec- tive at restoring the signal, while the WFS method stuck close to the clipped signal, which might be due to dierences in their optimization problems. Restoration of clipped sound signals Contents Contents 1 Introduction 1 2 Theory 1 2.1 Clipping in a loudspeaker system . -

K.2 Loudspeaker Firmware Update 1.2.0 FAQ FAQ
K.2 Loudspeaker Firmware Update 1.2.0 FAQ FAQ Q: Why do I need to update my K.2 loudspeaker? Q: Can I use the Updater Tool with computers using A: When played at excessive levels with audible distortion, K10.2 Microsoft Windows 7 ? models may experience a critical low frequency driver failure A: The Updater Tool works with Microsoft Windows 10. If you with no amplifier protection to alert the user. The unit may also are using Microsoft Windows 7, you must install the following overheat, with the potential to damage the rest of the driver before installing the Updater Tool: Android_Gadget_ loudspeaker. This issue is remedied by updating the firmware CDC_driver. from version 1.0.8 or 1.1.0 to version 1.2.0. With this update, if a failure occurs the amplifier will power off voltage to both Q: How do I know if my K.2 loudspeaker is distorting? drivers and allow the user to complete a listening test to A: The loudspeaker will produce an unwanted fuzzy, gritty, rat- determine if the loudspeaker requires service. Owners of K12.2 tling, and/or buzzing sound. and K8.2 will also benefit from amplifier protection improve- Q: What can cause my K.2 loudspeaker to distort? ments in the new firmware, and are encouraged to update their A: Distortion occurs when a gain stage (channel input or out- loudspeakers as well. put) is clipping heavily, squaring off the peaks of the sound Q: Will the firmware update change the sound or per- waves, and created a harsh/raspy sound to the audio that was formance of my K.2 loudspeaker? otherwise clear. -

Emulation of Amplifier Overdrive Through the Use of the Nonlinear Output Response of Diodes
Emulation of Amplifier Overdrive Through the Use of the Nonlinear Output Response of Diodes Dustin Lindley, Nishant Parulekar Department of Physics, University of Illinois at Urbana-Champaign 1110 West Green Street, Urbana, IL 61801-3080, USA Harmonic distortion is the most commonly used electric guitar effect. We have constructed a distortion pedal to emulate the sounds of overdriven tube amplifiers. The fuzz box created was designed for high versatility in controlling many parameters of an audio signal while at the same time retaining a simplicity that would allow it to be reproduced as a laboratory experiment. The output of the fuzz box is analyzed in terms of harmonic content and sound. I. INTRODUCTION within the device's manageability. The primary method of achieving this status was to increase Harmonic distortion of signals is a the levels of the signal to an amount that desired sound for many musicians. However, exceeded the amplifiers processing capabilities. there are many parameters that can be altered in This resulted in a clipping of the signal such that order to subtlety or drastically change the wave the top and bottom portions of the wave were cut form and hence sound. We have tried to design a off, which limits as a square wave. This is one laboratory experiment for the Physics of Musical of the simplest ways to describe distortion. Instruments class that would allow students to understand the physics, theory, and application The Demand for Distortion of distortion. Additionally, the lab is designed so that students can investigate the physics behind The sounds of overdriven amplifiers various stages of the signal processor in order became popular for many musicians. -

Table of Contents Audiophile USB Owner's Manual
Audiophile USB Owner’s Manual version: AP-050103 Table of Contents Introduction . .2 What’s in the Box? . .2 About the Audiophile USB . .2 Features & Specifications . .3 Minimum System Requirements . .3 Front Panel Features . .4 Rear Panel Features . .4 Guide to Getting Started Quickly . .5 Hardware Installation . .6 Audiophile USB Driver & Software Installation . .6 Windows Installation . .6 Macintosh OS 9 Installation . .7 OMS Configuration . .7 Macintosh OS X Installation . .8 Verifying Windows Driver Installation . .9 Verifying Control Panel Installation, PC/Macintosh . .9 The Audiophile USB Control Panel . .10 Windows Sound System and the Audiophile USB . .13 Macintosh Sound Manager and the Audiophile USB . .13 Audiophile USB Inputs & Outputs . .13 Audiophile USB with Your Music Software . .14 Audiophile USB MIDI Setup . .17 Troubleshooting . .18 Contact Information . .21 Audiophile USB Warranty . .22 Appendix A - Technical Specifications . .23 Appendix B - Driver/Software Install, Step by Step . .24 Windows XP: . .24 Windows 2000: . .29 Windows ME: . .33 Introduction Congratulations on your purchase of the Audiophile USB by M-Audio. The Audiophile USB is your audio and MIDI upgrade for any PC or Macintosh computer*, utilizing the convenience of your computer’s USB port—no tools or computer disassembly is required.The Audiophile brings you true 24-bit 96kHz audio and the highest-quality stereo, and digital multi-channel surround sound available today. Even if you are experienced in digital recording, please take the time to read this manual. It will give you valuable information on installing your new interface and the supporting software, plus help you to fully understand the function and usability of the Audiophile USB. -

Installation Guide
A A A A TV E TV E TV B E A B A B E E 5.2 5.2 E 7.2 SURROUND SURROUND SURROUND (IN-WALL) (IN-CEILING) (IN-WALL) C C D D D D D D E TV E A B A AMBIENT F AMBIENT 7.2 F SURROUND (IN-WALL) (IN-CEILING) (IN-CEILING) G C C F F D D INSTALLATION GUIDE SuGGESTED SPEAkER LAyOuT OPTIONS Frameless In-Wall LCR Loudspeaker A - Front Channel A - Front Channel B - Center Channel TV b - Center Channel C - Side Channel E E C - Surround Channel D - Rear Channel D - Rear Surround In-Wall model Overall Cut-Out (W x H x D) E - Subwoofer A B A F - 2 Channel Ambient Channel PE-W620-LCRSf 6-1/2" In-Wall LCR Loudspeaker with Rotating Waveguide 9" x 15-3/4" 7-7/8" x 14-7/16" x 3-1/2" G - Single-Point Stereo 22º 0º 22º E - Subwoofer • May be used instead of º º F - High-Resolution Congratulations! You have purchased a high quality stereo The waveguide also increases the 2-channel setup. Helps 30 30 save space and is great 2-Channel loudspeaker. When matched to comparable electronic efficiency of the tweeter, allowing it for moist areas like 7.2 equipment, expect years of quality high fidelity sound. Our to operate with far less input power Bathrooms or Kitchens. belief is that music matters and we are focused on delivering and significantly lower distortion. SURROUND superlative music reproduction everywhere in your home.