Doodle Labs Smart Radio Advanced MIMO Mesh Router in a Tiny Form Factor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Remote Cellular TCP/IP Access to Rockwell Ethernet and Serial Devices
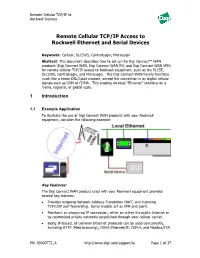
Remote Cellular TCP/IP to Rockwell Devices Remote Cellular TCP/IP Access to Rockwell Ethernet and Serial Devices Keywords: Cellular, SLC5/05, ControlLogix, MicroLogix Abstract: This document describes how to set up the Digi Connect™ WAN products (Digi Connect WAN, Digi Connect WAN RG, and Digi Connect WAN VPN) for remote cellular TCP/IP access to Rockwell equipment, such as the PLC5E, SLC5/05, ControlLogix, and MicroLogix. The Digi Connect WAN Family functions much like a home DSL/Cable modem, except the connection is by digital cellular signals such as GSM or CDMA. This enables wireless “Ethernet” solutions on a metro, regional, or global scale. 1 Introduction 1.1 Example Application To illustrate the use of Digi Connect WAN products with your Rockwell equipment, consider the following example: Key Features: The Digi Connect WAN product used with your Rockwell equipment provides several key features: • Provides outgoing Network-Address-Translation (NAT) and incoming TCP/UDP port forwarding. Some models act as VPN end-point. • Maintains an always-up IP connection, either on either the public Internet or by customized private networks established through your cellular carrier. • Being IP-based, all common Ethernet protocols can be used concurrently, including HTTP (Web browsing), ODVA Ethernet/IP, CSPv4, and Modbus/TCP. PN: 90000772_A http://www.digi.com/support/ia Page 1 of 37 Remote Cellular TCP/IP to Rockwell Devices • Existing applications, such as RSLinx, RSLogix and OPC, can be configured to access the field equipment through existing corporate LAN connections. • Intelligent field devices can use IP-based protocols to send email, file updates, or report-by-exception notifications. -

Portproxy User's Guide
portproxy User©s Guide Author: Tomasz Mrugalski version 2009-10-22 Table of contents 1 Project overview...............................................................................................................................4 1.1 Phase 1: Portproxy.....................................................................................................................4 1.2 Phase 2: Port forwarding GUI..................................................................................................4 2 Project status.....................................................................................................................................4 2.1 Phase 1: portproxy.....................................................................................................................4 2.2 Phase 2: Port forwarding GUI...................................................................................................4 2.3 Revision history........................................................................................................................4 3 Portproxy overview...........................................................................................................................5 4 Compilation......................................................................................................................................5 4.1 OpenWRT compilation.............................................................................................................5 4.2 MiniUPNP daemon...................................................................................................................6 -

Secure Shell- Its Significance in Networking (Ssh)
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: [email protected] Volume 4, Issue 3, March 2015 ISSN 2319 - 4847 SECURE SHELL- ITS SIGNIFICANCE IN NETWORKING (SSH) ANOOSHA GARIMELLA , D.RAKESH KUMAR 1. B. TECH, COMPUTER SCIENCE AND ENGINEERING Student, 3rd year-2nd Semester GITAM UNIVERSITY Visakhapatnam, Andhra Pradesh India 2.Assistant Professor Computer Science and Engineering GITAM UNIVERSITY Visakhapatnam, Andhra Pradesh India ABSTRACT This paper is focused on the evolution of SSH, the need for SSH, working of SSH, its major components and features of SSH. As the number of users over the Internet is increasing, there is a greater threat of your data being vulnerable. Secure Shell (SSH) Protocol provides a secure method for remote login and other secure network services over an insecure network. The SSH protocol has been designed to support many features along with proper security. This architecture with the help of its inbuilt layers which are independent of each other provides user authentication, integrity, and confidentiality, connection- oriented end to end delivery, multiplexes encrypted tunnel into several logical channels, provides datagram delivery across multiple networks and may optionally provide compression. Here, we have also described in detail what every layer of the architecture does along with the connection establishment. Some of the threats which Ssh can encounter, applications, advantages and disadvantages have also been mentioned in this document. Keywords: SSH, Cryptography, Port Forwarding, Secure SSH Tunnel, Key Exchange, IP spoofing, Connection- Hijacking. 1. INTRODUCTION SSH Secure Shell was first created in 1995 by Tatu Ylonen with the release of version 1.0 of SSH Secure Shell and the Internet Draft “The SSH Secure Shell Remote Login Protocol”. -
Wing How to Guide
Configuration Guide for RFMS 3.0 Initial Configuration XXX-XXXXXX-XX WiNG5 How-To Guide Network Address Translation July 2011 Revision 1.0 MOTOROLA and the Stylized M Logo are registered in the US Patent & Trademark Office. Symbol is a registered trademark of Symbol Technologies, Inc. All other product or service names are the property of their respective owners. © 2011 Motorola, Inc. All rights reserved. WiNG5 – Network Address Translation How-To Guide Table of Contents 1. Introduction: ...............................................................................................................................................4 1.1 Overview:............................................................................................................................................4 1.2 Applications: .......................................................................................................................................5 1.3 Restrictions: ........................................................................................................................................5 2. Pre‐Requisites: ............................................................................................................................................6 2.1 Requirements: ....................................................................................................................................6 2.2 Components Used:..............................................................................................................................6 -

Nokia HA-140W-B
Port forwarding for Nokia HA-140W-B Port forwarding can be used to establish a home-based FTP server, web server or similar kind of a server. The server is located on the LAN client (e.g. desktop computer or laptop). To set up Port forwarding, log into your router and go to Application > Port Forwarding. See image 1. Image 1. Port forwarding configured with port mapping (WAN port maps to LAN port) To set a specific port forwarding rule, select Custom settings for Application Name line. In the WAN Port field, set an arbitrary port on WAN interface of a router (e.g. TCP port 12001). All requests coming to the server from the internet side will have a destination IP address of the router itself, and a destination port as listed in WAN Port fields. For LAN port fields, list the port on which the LAN client server app is running (in this case TCP port 8008). Select the appropriate LAN client (server machine) from the dropdown menu on Internal Client. Protocol is determined by the type of server application (in this case TCP). Tick Enable Mapping and click Add to save the rule. Once the rule is saved, you’ll see the confirmation (see image 2). 1 Image 2. Port forwarding rule confirmation Similarly, ports on WAN and LAN side can be kept the same (see image 3). Image 3 shows the second way things can be configured. It’s up to you whether you prefer to use the methods in image 1 or image 3. Image 3. -
PF: the Openbsd Packet Filter
PF: The OpenBSD Packet Filter Languages: [en] [de] [es] [fr] [id] [ja] [pl] [up to FAQ] [Next: Getting Started] PF: The OpenBSD Packet Filter Table of Contents ● Basic Configuration ❍ Getting Started ❍ Lists and Macros ❍ Tables ❍ Packet Filtering ❍ Network Address Translation ❍ Traffic Redirection (Port Forwarding) ❍ Shortcuts For Creating Rulesets ● Advanced Configuration ❍ Runtime Options ❍ Scrub (Packet Normalization) ❍ Anchors and Named (Sub) Rulesets ❍ Packet Queueing and Prioritization ❍ Address Pools and Load Balancing ❍ Packet Tagging ● Additional Topics ❍ Logging ❍ Performance ❍ Issues with FTP ❍ Authpf: User Shell for Authenticating Gateways ● Example Rulesets ❍ Example #1: Firewall for Home or Small Office Packet Filter (from here on referred to as PF) is OpenBSD's system for filtering TCP/IP traffic and doing Network Address Translation. PF is also capable of normalizing and conditioning TCP/IP traffic and providing bandwidth control and packet prioritization. PF has been a part of the GENERIC OpenBSD kernel since OpenBSD 3.0. Previous OpenBSD releases used a different firewall/NAT package which is no longer supported. PF was originally developed by Daniel Hartmeier and is now maintained and developed by Daniel and the rest of the OpenBSD team. This set of documents is intended as a general introduction to the PF system as run on OpenBSD. It is intended to be used as a supplement to the man pages, not as a replacement for them. This document covers all of PF's major features. For a complete and http://www.openbsd.org/faq/pf/index.html (1 of 2) [14/04/2004 20:53:58] PF: The OpenBSD Packet Filter in-depth view of what PF can do, please start by reading the pf(4) man page. -

Tunneling with Secure Shell (SSH) Secure Shell Tunneling with Secure Shell
White Paper Tunneling with Secure Shell (SSH) 4848 tramway ridge dr. ne suite 101 albuquerque, nm 87111 505 - 332 -5700 www.vandyke.com Tunneling with Secure Shell Remote access to network resources is increasingly a business requirement, but external network threats must be neutralized. A Secure Shell (SSH) capability called port forwarding allows nonsecure TCP/IP data to be tunneled across public and private networks through a secure, encrypted connection. The benefits of port forwarding are illustrated by a series of concrete examples. VanDyke Software's clients and servers provide an end-to-end tunneling solution to secure client/server applications, which may serve as a lightweight alternative to a Virtual Private Network (VPN). With today’s increasingly mobile and distributed workforce, providing remote access to travelers and teleworkers is no longer a “nice to have” option. In many corporations, remote access to business applications has become mission critical. At the same time, Internet access is now cheap, fast, and readily available. Leveraging the Internet to extend the local area network (LAN), provide real-time communications, and immediate file transfer and sharing is a scalable, cost-effective soluti on for corporate network remote access. However, Internet-based remote access also adds significant risk. Sensitive data can be intercepted, modified, or replayed anywhere between remote workers and the corporate firewall. Broadcast access technologies like cable and wireless are especially vulnerable. Whenever a computer is connected to the Internet, it becomes a potential target for intruders. "Always on" broadband greatly increases this exposure by giving intruders a fixed target to attack repeatedly over time. -
How to Set up the Cyberq Part IV Port Forwarding
How To Set Up The CyberQ Part IV Port Forwarding Port forwarding is a setting in your router that will direct a request coming in from the Internet to a device or program on your network. This is the technology that enables Web cams and online gaming. The CyberQ only requires a single port to operate, so it is relatively simple to setup. Again, you need to access your router’s web interface. Look for a menu item, a link, or a tab that will usually be labeled Port Forwarding, or NAT/Gaming, or it may be in a section dealing with firewalls and/or security. Once you find the port forwarding section, you will probably see a table or grid showing active definitions. The definition will involve an application name, an internal and external port, plus an IP address. Many times you can select a pre-defined application from a drop-down box; if so, you will want to select HTTP, as the CyberQ responds to Web requests. Both ports will, at least initially, be set to 80, and the IP address will be the CyberQ’s reserved address. Once you set these values in place and save them, many times remote access will be up and running. To test, take your smartphone and turn WiFi off so it is running on cellular Internet. Open up a browser and type in the public IP address you got from www.whatismyip.com. With luck, your smartphone will pull up the main CyberQ page and you will be done. If the page does not pull up, you need to review the port forwarding settings already in place. -

VDE: Virtual Distributed Ethernet
VDE: Virtual Distributed Ethernet Renzo Davoli∗ Department of Computer Science University of Bologna, Italy email: [email protected] Abstract permits the concurrent execution and communication of several virtual or emulated machines through an emulated The idea of VDE is very effective but straightforward network. These tools however fail in generality and distri- simple and can be applied in very many configuration to bution: in generality as they are tailored to one single kind provide several services. It is a sort of Swiss knife of em- of virtual or emulated machine, in distribution as everything ulated networks. It can be used as a general Virtual Pri- (emulate machinesand the network emulator itself) must re- vate network as well as a support technology for mobility, side and run on the same real computer. a tool for network testing, a general reconfigurable over- It is possible to create a completely virtual/emulated net- lay network, a layer for implementing privacy preserving working space by using VDE together with virtual ma- technologies and many others. A prototype VDE has been chines on a set of real (based on hardware, physical) com- implemented and released as Free Software under the GPL puters connected by a real network. This second layer licence [11]. of virtuality has been also named as Virtual Square [12]. Square has here the double meaning of squared (i.e. el- evated to the second power) and of a virtual place where 1 Introduction machines and humans can meet. The remaining if the paper is organized as follows. Sec- tion 2 presents the structure and the composing entities of The acronym VDE is self explaining: it is a Virtual net- a VDE, section 3 explains some examples of VDE apppli- work because it is built completely in software, it is Dis- cations. -
Setting up a Secure Network Using Pfsense Tyler Thompson
Setting Up a Secure Network Using pfSense Tyler Thompson I’ve been working in IT for a number of years and my knowledge in networking mainly comes from work experience and self-teaching, so I’m really only scratching the surface of the subject with this paper. There are many different types of networking devices that can be used as a firewall/routing solution, but I set up my home network with pfSense. When I began looking for a new routing solution, I was looking for something that gave me full control of the security and traffic flow of my network. I chose pfSense because it is capable of providing business-grade network management for free and it was the best I could find after trying many others. What is pfSense? pfSense is an open-source firewall/router operating system based on FreeBSD. It can be installed on a normal consumer-grade computer, such as a desktop. It provides terminal and web interfaces to the user and is capable of providing services normally only found on business-grade networking devices. See the links below for more details. https://www.pfsense.org/ https://en.wikipedia.org/wiki/PfSense Basic Home Network Figure 1 shows the network topology of a typical home network. This diagram divides all the “moving parts” of the network into separate devices. In practice, it is typical for some of these devices to be combined into one device. For example, newer modems Comcast supplies have the modem, firewall, router, switch, and wifi access point all in one device. -
Sshuttle, the Unilateral VPN
Sshuttle, the unilateral VPN Avery Pennarun 2011 04 30 (rev.b) What's a VPN? ● Connect to computers on the other side of a firewall as if you were there 5 IPsec Sucks ● The most nonstandard standard ever passed by the IETF ● Virtually all implementations are incompatible ● Not designed for NAT ● every NAT router had to add special support for it ● Requires kernel-level driver ● Bloats packets ● Requires a genius to configure 9 OpenVPN Sucks Less ● There's only one, so it interoperates ● Free ● Not written by morons ● Still requires kernel-level support ● Still hard to configure ● Still requires support from your admin ● ...who probably prefers IPsec... ● No blessing from the IETF 10 ssh ● Exists everywhere there's Unix ● Easy to set up: often installed by default ● Works with simple password authentication ● But allows fancy public key crypto ● Sucks at port forwarding 12 Sshuttle ● A VPN on top of ssh ● Works with any ssh server ● Exactly as easy as ssh ● Leaves all the crypto to ssh ● Gets through NAT as easily as ssh ● Needs no admin access on the server 14 Digression: TCP-over-TCP ● The obvious way to route packets over ssh is a disaster ● I should know, I did it ● TCP depends on packet loss to control its speed ● But when carrying TCP over TCP, the inner TCP never experiences packet loss because the outer TCP fixes it 17 Double Digression: Rate Limiting 1a ● If both ends of a connection are on 100 MBit ethernet... ● How do they know the link between is only 1 MBit? 18 Double Digression: Rate Limiting 1b ● They don't! ● The slow link -

NAT- Network Address Translation, Port Forwarding and Port Trigg
NAT- Network address translation, port forwarding and port trigg The principle of NAT Network address translation or NAT was developed in order to respond to the shortage of IP addresses with IPv4 protocol (in time the IPv6 protocol will respond to this problem). In fact, in IPv4 addressing the number of routable IP addresses (which are unique in the world) is not enough to enable all machines requiring it to be connected to the internet. The principle of NAT therefore consists of using a gateway connection to the Internet, having at least one network interface connected to the internal network and at least one network interface connected to the Internet (possessing a routable IP address), in order to connect all the machines to the network. It is a question of creating, at gateway level, a translation of packets coming from the internal network to the external network. So, each machine on the network needing to access the Internet is configured to use the NAT gateway (by specifying the IP address of the gateway in the "Gateway" field with its TCP/IP parameters). When a network machine makes a request to the Internet, the gateway makes the request in its place, receives the response, then sends it to the machine which made the request. Since the gateway completely conceals the internal addresses on the network, the network address translation mechanism provides a secure function. In fact, to an external observer of the network, all requests seem to come from the gateway IP address. Address space The organization managing public address space (routable IP addresses) is theInternet Assigned Number Authority (IANA).