3. Visual Attention
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

241E1SB/00 Philips LCD Monitor with Smarttouch Controls
Philips LCD monitor with SmartTouch controls 24"w E-line Full HD 241E1SB Big Full-HD display for great viewing experience Enjoy more with this attractive 16:9 Full HD 1080p quality display ! With DVI and VGA inputs, Auto format, SmartContrast and Glossy finish, the 241E1 is a compelling choice for all your needs Great picture quality • Full HD LCD display, 1920x1080p resolution • 16:9 display for best widescreen gaming and video • 5ms fast response time • SmartContrast 25000:1 for incredible rich black details • DVI signal input for full HD performance with HDCP Design that complements any interior • Glossy finish to enhance your decor Environmentally friendly green design • Energy Star for energy efficiency and low power consumption • Eco-friendly materials meets major International standards Great convenience • Dual input accepts both analog VGA and digital DVI signals • Ultra-modern SmartTouch controls • Auto picture format control switching in wide and 4:3 format LCD monitor with SmartTouch controls 241E1SB/00 24"w E-line Full HD Highlights Full HD 1920x1080p LCD display SmartContrast ratio 25000:1 exceed the standard. For example, in sleep This display has a resolution that is referred to mode Energy Star 5.0 requires less than 1watt as Full HD. With state-of-the-art LCD screen power consumption, whereas Philips monitors technology it has the full high-definition consume less than 0.5watts. Further details can widescreen resolution of 1920 x 1080p. It allows be obtained from www.energystar.gov the best possible picture quality from any format of HD input signal. It produces brilliant flicker- Dual input free pictures with optimum brightness and superb colors. -

190V1SB/00 Philips LCD Widescreen Monitor
Philips LCD widescreen monitor 19"w V-line 1440 x 900/Format 16:10 190V1SB Widescreen display offering good value With features like DVI and VGA inputs, SmartContrast and Energy efficiency, the 190V1 offers good value. High-quality picture • WXGA+, wide format 1440 x 900 resolution for sharper display • 5 ms fast response time • SmartContrast: For incredible rich black details Great convenience • Dual input accepts both analogue VGA and digital DVI signals • Easy picture format control switching between wide and 4:3 formats • Screen tilts to your ideal, individualised viewing angle Environmentally friendly green design • Eco-friendly materials that meet international standards • Complies with RoHS standards of care for the environment • EPEAT Silver ensures lower impact on environment LCD widescreen monitor 190V1SB/00 19"w V-line 1440 x 900/Format 16:10 Highlights Specifications Eco-friendly materials and back again to match the display's aspect ratio Picture/Display With sustainability as a strategic driver of its with your content; it allows you to work with wide • LCD panel type: TFT-LCD business, Philips is committed to using eco-friendly documents without scrolling or viewing widescreen • Panel Size: 19 inch/48.1 cm materials across its new product range. Lead-free media in the widescreen mode and gives you • Aspect ratio: 16:10 materials are used across the range. All body plastic distortion-free, native mode display of 4:3 ratio • Pixel pitch: 0.285 x 0.285 mm parts, metal chassis parts and packing material uses content. • Brightness: 250 cd/m² 100% recyclable material. A substantial reduction in • SmartContrast: 20000:1 mercury content in lamps has been achieved. -

WFM7200 Multiformat Multistandard Waveform Monitor
Multiformat, multistandard waveform monitor WFM7200 Datasheet Comprehensive audio monitoring (Option AD or DPE) Up to 16-channel audio monitoring for embedded audio Multichannel Surround Sound 1 display and flexible Lissajous display with audio level readouts Audio Loudness monitoring to ITU-R BS.1770-3 with audio trigger start/stop functions via GPI (Option AD or DPE) Support for analog, digital, and embedded audio (Option AD) Dolby Digital (AC-3), Dolby Digital Plus, and Dolby E (Option DPE) Comprehensive Dolby metadata decode and display (Option DPE) Dolby E Guard Band meter with user-defined limits (Option DPE) Unmatched display versatility FlexVu™, the most flexible four-tile display, suited for various application needs to increase productivity Patented Diamond and Arrowhead displays for gamut This video/audio/data monitor and analyzer all-in-one platform provides monitoring flexible options and field installable upgrades to monitor a diverse variety of Patented Timing and Lightning displays video and audio formats. Support for video formats includes 3G-SDI, Dual New patented Spearhead display and Luma Qualified Vector Link, HD-SDI and composite analog. Support for audio formats includes (LQV™) display facilitate precise color adjustment for post- Dolby E, Dolby Digital Plus, Dolby Digital, AES/EBU, embedded audio and production applications (Option PROD) analog audio. Stereoscopic 3D video displays for camera alignment and production/ Option GEN provides a simple test signal generator output that creates post-production applications -

Panasonic BT-LH1710 Operating Instructions
Operating Instructions LCD Video Monitor Model No. BT-LH1760P Model No. BT-LH1760E Model No. BT-LH1710P Model No. BT-LH1710E Before operating this product, please read the instructions carefully and save this manual for future use. F1008T0 -P D ENGLISH Printed in Japan VQT1Z04 Read this first ! (for BT-LH1760P/1710P) CAUTION: In order to maintain adequate ventilation, do not install or place this unit in a bookcase, built-in cabinet or any other confined space. To prevent risk of electric shock or fire hazard due to overheating, ensure that curtains and any other materials do not obstruct the ventilation. CAUTION: TO REDUCE THE RISK OF FIRE OR SHOCK HAZARD AND ANNOYING INTERFERENCE, USE THE RECOMMENDED ACCESSORIES ONLY. CAUTION: This apparatus can be operated at a voltage in the range of 100 - 240 V AC. Voltages other than 120 V are not intended for U.S.A. and Canada. CAUTION: Operation at a voltage other than 120 V AC may require the use of a different AC plug. Please contact either a local or foreign Panasonic authorized service center for assistance in selecting an alternate AC plug. ■ THIS EQUIPMENT MUST BE GROUNDED To ensure safe operation, the three-pin plug must be inserted only into a standard three-pin power outlet CAUTION: which is effectively grounded through normal • Keep the temperature inside the rack to household wiring. Extension cords used with the between 41°F to 95°F (5°C to 35°C). equipment must have three cores and be correctly • Bolt the rack securely to the floor so that it wired to provide connection to the ground. -

Camera Basics, Principles and Techniques –MCD 401 VU Topic No
Camera Basics, Principles and techniques –MCD 401 VU Topic no. 76 Film & Video Conversion Television standards conversion is the process of changing one type of TV system to another. The most common is from NTSC to PAL or the other way around. This is done so TV programs in one nation may be viewed in a nation with a different standard. The TV video is fed through a video standards converter that changes the video to a different video system. Converting between a different numbers of pixels and different frame rates in video pictures is a complex technical problem. However, the international exchange of TV programming makes standards conversion necessary and in many cases mandatory. Vastly different TV systems emerged for political and technical reasons – and it is only luck that makes video programming from one nation compatible with another. History The first known case of TV systems conversion probably was in Europe a few years after World War II – mainly with the RTF (France) and the BBC (UK) trying to exchange their441 line and 405 line programming. The problem got worse with the introduction of PAL, SECAM (both 625 lines), and the French 819 line service. Until the 1980s, standards conversion was so difficult that 24 frame/s 16 mm or 35 mm film was the preferred medium of programming interchange. Overview Perhaps the most technically challenging conversion to make is the PAL to NTSC. PAL is 625 lines at 50 fields/s NTSC is 525 lines at 59.94 fields/s (60,000/1,001 fields/s) The two TV standards are for all practical purposes, temporally and spatially incompatible with each other. -

Computational Complexity Optimization on H.264 Scalable/Multiview Video Coding
Computational Complexity Optimization on H.264 Scalable/Multiview Video Coding By Guangyao Zhang A thesis submitted in partial fulfilment for the requirements for the degree of PhD, at the University of Central Lancashire April 2014 Student Declaration Concurrent registration for two or more academic awards I declare that while registered as a candidate for the research degree, I have not been a registered candidate or enrolled student for another award of the University or other academic or professional institution. Material submitted for another award I declare that no material contained in the thesis has been used in any other submission for an academic award and is solely my own work. Collaboration This work presented in this thesis was carried out at the ADSIP (Applied Digital Signal and Image Processing) Research Centre, University of Central Lancashire. The work described in the thesis is entirely the candidate’s own work. Signature of Candidate ________________________________________ Type of Award Doctor of Philosophy School School of Computing, Engineering and Physical Sciences Abstract Abstract The H.264/MPEG-4 Advanced Video Coding (AVC) standard is a high efficiency and flexible video coding standard compared to previous standards. The high efficiency is achieved by utilizing a comprehensive full search motion estimation method. Although the H.264 standard improves the visual quality at low bitrates, it enormously increases the computational complexity. The research described in this thesis focuses on optimization of the computational complexity on H.264 scalable and multiview video coding. Nowadays, video application areas range from multimedia messaging and mobile to high definition television, and they use different type of transmission systems. -
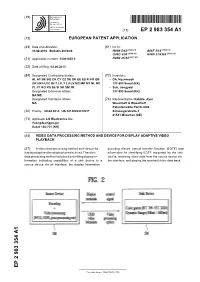
Video Data Processing Method and Device for Display Adaptive Video Playback
(19) TZZ ¥¥_T (11) EP 2 983 354 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 10.02.2016 Bulletin 2016/06 H04N 5/44 (2006.01) G06F 3/14 (2006.01) G09G 5/00 (2006.01) H04N 21/4363 (2011.01) (2011.01) (21) Application number: 15001639.2 H04N 21/44 (22) Date of filing: 02.06.2015 (84) Designated Contracting States: (72) Inventors: AL AT BE BG CH CY CZ DE DK EE ES FI FR GB • Oh, Hyunmook GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO 137-893 Seoul (KR) PL PT RO RS SE SI SK SM TR • Suh, Jongyeul Designated Extension States: 137-893 Seoul (KR) BA ME Designated Validation States: (74) Representative: Katérle, Axel MA Wuesthoff & Wuesthoff Patentanwälte PartG mbB (30) Priority: 08.08.2014 US 201462034792 P Schweigerstraße 2 81541 München (DE) (71) Applicant: LG Electronics Inc. Yeongdeungpo-gu Seoul 150-721 (KR) (54) VIDEO DATA PROCESSING METHOD AND DEVICE FOR DISPLAY ADAPTIVE VIDEO PLAYBACK (57) A video data processing method and/ device for including electro optical transfer function (EOTF) type display adaptive video playback are disclosed. The video information for identifying EOTF supported by the sink data processing method includes transmitting display in- device, receiving video data from the source device via formation indicating capabilities of a sink device to a the interface, and playing the received video data back. source device via an interface, the display information EP 2 983 354 A1 Printed by Jouve, 75001 PARIS (FR) EP 2 983 354 A1 Description BACKGROUND OF THE INVENTION 5 Field of the Invention [0001] The present invention relates to processing of video data and, more particularly, to a video data processing method and device for display adaptive video playback. -
Digital Image Prep for Displays
Digital Image Prep for Displays Jim Roselli ISF-C, ISF-R, HAA Tonight's Agenda • A Few Basics • Aspect Ratios • LCD Display Technologies • Image Reviews Light Basics We view the world in 3 colors Red, Green and Blue We are Trichromatic beings We are more sensitive to Luminance than to Color Our eyes contain: • Light 4.5 million cones (color receptors) 90 million rods (lumen receptors) Analog vs. Digital Light Sample • Digitize the Photon Light Sample Light Sample DSLR’s Canon 5D mkII and Nikon D3x 14 bits per color channel (16,384) Color channels (R,G & B) • Digital Capture Digital Backs Phase One 16 bits per channel (65,536) Color channels (R,G & B) Square Pixels Big pixels have less noise … Spatial Resolution Round spot vs. Square pixel • Size Matters Square Pixels • What is this a picture of ? Aspect Ratio Using Excel’s “Greatest Common Divisor” function • The ratio of the width to =GCD(x,y) xRatio = (x/GCD) the height of the image yRatio = (y/GCD) on a display screen Early Television • How do I calculate this ? Aspect Ratio 4 x 3 Aspect Ratio • SAR - Storage Aspect Ratio • DAR – Display Aspect Ratio • PAR – Pixel Aspect Ratio Aspect Ratio Device Width(x) Heigth(y) GCD xRa5o yRa5o Display 4096 2160 16 256 135 Display 1920 1080 120 16 9 • Examples Display 1280 720 80 16 9 Display 1024 768 256 4 3 Display 640 480 160 4 3 Aspect Ratio Device Width(x) Heigth(y) GCD xRa5o yRa5o Nikon D3x 6048 4032 2016 3 2 • Examples Canon 5d mkII 4368 2912 1456 3 2 Aspect Ratio Device Width(x) Heigth(y) GCD xRa5o yRa5o iPhone 1 480 320 160 3 2 HTC Inspire 800 480 160 5 3 • Examples Samsung InFuse 800 480 160 5 3 iPhone 4 960 640 320 3 2 iPad III 2048 1536 512 4 3 Motorola Xoom Tablet 1280 800 160 8 5 Future Aspect Ratio Device Width(x) Heigth(y) GCD xRa5o yRa5o Display 2048 1536 512 4 3 Display 3840 2160 240 16 9 Display 7680 4320 480 16 9 Aspect Ratio 4K Format Aspect Ratio • Don’t be scared … Pan D3x Frame . -

(12) United States Patent (10) Patent No.: US 7,257,776 B2 Bailey Et Al
US007257776B2 (12) United States Patent (10) Patent No.: US 7,257,776 B2 Bailey et al. (45) Date of Patent: Aug. 14, 2007 (54) SYSTEMS AND METHODS FORSCALING A 5,838,969 A 11/1998 Jacklin et al. GRAPHICAL USER INTERFACE 5,842,165 A 11/1998 Raman et al. ACCORDING TO DISPLAY DIMIENSIONS 5,854,629 A 12/1998 Redpath AND USINGA TERED SIZING SCHEMATO 6,061,653 A 5, 2000 Fisher et al. DEFINE DISPLAY OBJECTS 6,081,816 A * 6/2000 Agrawal ..................... 715,521 6,125,347 A 9, 2000 Cote et al. 6, 192,339 B1 2, 2001 Cox (75) Inventors: Richard St. Clair Bailey, Bellevue, 6,233,559 B1 5/2001 Balakrishnan WA (US); Stephen Russell Falcon, 6,310,629 B1 10/2001 Muthusamy et al. Woodinville, WA (US); Dan Banay, 6,434,529 B1 8, 2002 Walker et al. Seattle, WA (US) 6,456.305 B1* 9/2002 Qureshi et al. ............. T15,800 6,456,974 B1 9, 2002 Baker et al. (73) Assignee: Microsoft Corporation, Redmond, WA (US) (Continued) OTHER PUBLICATIONS (*) Notice: Subject to any disclaimer, the term of this patent is extended or adjusted under 35 “Winamp 3 Preview”.http://www.mp3 newswire.net/stories/2001/ U.S.C. 154(b) by 286 days. winamp3.htm. May 23, 2001. (Continued) (21) Appl. No.: 10/072,393 Primary Examiner Tadesse Hailu (22) Filed: Feb. 5, 2002 Assistant Examiner Michael Roswell (74) Attorney, Agent, or Firm—Lee & Hayes PLLC (65) Prior Publication Data US 2003/O146934 A1 Aug. 7, 2003 (57) ABSTRACT Systems and methods are described for Scaling a graphical (51) Int. -

The Art of Sound Reproduction the Art of Sound Reproduction
The Art of Sound Reproduction The Art of Sound Reproduction John Watkinson Focal Press An imprint of Butterworth-Heinemann Ltd 225 Wildwood Avenue, Woburn, MA 01801-2041 Linacre House, Jordan Hill, Oxford OX2 8DP A member of the Reed Elsevier plc group OXFORD JOHANNESBURG BOSTON MELBOURNE NEW DELHI SINGAPORE First published 1998 John Watkinson 1998 All rights reserved. No part of this publication may be reproduced in any material form (including photocopying or storing in any medium by electronic means and whether or not transiently or incidentally to some other use of this publication) without the written permission of the copyright holder except in accordance with the provisions of the Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London, England W1P 9HE. Applications for the copyright holder’s written permission to reproduce any part of this publication should be addressed to the publishers British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library Library of Congress Cataloguing in Publication Data A catalogue record for this book is available from the Library of Congress ISBN 0 240 51512 9 Typeset by Laser Words, Madras, India Printed and bound in Great Britain Contents Preface xiii Chapter 1 Introduction 1 1.1 A short history 1 1.2 Types of reproduction 8 1.3 Sound systems 12 1.4 Portable consumer equipment 14 1.5 Fixed consumer equipment 14 1.6 High-end hi-fi 16 1.7 Public address -

Property Name Definition / Semantics Ebucore Ebucore Implementation
EBUCore implementation hints and Property Name Definition / Semantics EBUcore examples EBU Core in mets:dmdSec[dataObject] The title of an item contained in a dataObject may differ, either slightly or wholly, from the title of the Version and/or title Work/Variant to which it is linked hierarchically. In particular, title/dc:title where an incomplete physical product of the Version has been acquired and been catalogued as an item The broad media type of the item contained in a dataObject (e.g., film, video, audio, optical, digital file). Recording this high-level <format><medium typeLabel="digital" physical description information will enable simple searching for only film, video, format/medium/@typeLabel /></format> digital, etc. elements rather than searching by all possible formats and carriers. The physical carrier storing the digital file.For digital files, it is most important for users to immediately identify the file <description description[@typeLabel=“specificCarrierType“]/ specific carrier type container or wrapper (MXF, MOV, DPX, etc.) Institutions should typeLabel=“specificCarrierType“><dc:descript dc:description develop standard lists of terms to indicate the specific carrier ion>DCDM</dc:description></description> type or refer to authoritative existing lists. Description of the preservation or access status of the description[@typeLabel=“accessStatus“]/ preservation/access status dataObject, for example Master, Viewing, etc. Select term from a dc:description controlled list. Additional information specific to the item contained in the description[@typeLabel=“comment“]/ supplementary information dataObject dc:description Enter the numerical measurement indicating the size of the file size format/fileSize[@unit="GB"] digital asset’s file(s), in KB, MB, GB, or TB. -

(Tech 3264) to Ebu-Tt Subtitle Files
TECH 3360 EBU-TT, PART 2 MAPPING EBU STL (TECH 3264) TO EBU-TT SUBTITLE FILES VERSION 1.0 SOURCE: SP/MIM – XML SUBTITLES Geneva May 2017 There are blank pages throughout this document. This document is paginated for two sided printing Tech 3360 - Version 1.0 EBU-TT Part 2 - EBU STL Mapping to EBU-TT Conformance Notation This document contains both normative text and informative text. All text is normative except for that in the Introduction, any section explicitly labelled as ‘Informative’ or individual paragraphs which start with ‘Note:’ Normative text describes indispensable or mandatory elements. It contains the conformance keywords ‘shall’, ‘should’ or ‘may’, defined as follows: ‘Shall’ and ‘shall not’: Indicate requirements to be followed strictly and from which no deviation is permitted in order to conform to the document. ‘Should’ and ‘should not’: Indicate that, among several possibilities, one is recommended as particularly suitable, without mentioning or excluding others. OR indicate that a certain course of action is preferred but not necessarily required. OR indicate that (in the negative form) a certain possibility or course of action is deprecated but not prohibited. ‘May’ and ‘need not’: Indicate a course of action permissible within the limits of the document. Default identifies mandatory (in phrases containing “shall”) or recommended (in phrases containing “should”) values that can, optionally, be overwritten by user action or supplemented with other options in advanced applications. Mandatory defaults must be supported. The support of recommended defaults is preferred, but not necessarily required. Informative text is potentially helpful to the user, but it is not indispensable and it does not affect the normative text.