Modeling Ward Leonard Speed Control System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Role of MHD Turbulence in Magnetic Self-Excitation in The
THE ROLE OF MHD TURBULENCE IN MAGNETIC SELF-EXCITATION: A STUDY OF THE MADISON DYNAMO EXPERIMENT by Mark D. Nornberg A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Physics) at the UNIVERSITY OF WISCONSIN–MADISON 2006 °c Copyright by Mark D. Nornberg 2006 All Rights Reserved i For my parents who supported me throughout college and for my wife who supported me throughout graduate school. The rest of my life I dedicate to my daughter Margaret. ii ACKNOWLEDGMENTS I would like to thank my adviser Cary Forest for his guidance and support in the completion of this dissertation. His high expectations and persistence helped drive the work presented in this thesis. I am indebted to him for the many opportunities he provided me to connect with the world-wide dynamo community. I would also like to thank Roch Kendrick for leading the design, construction, and operation of the experiment. He taught me how to do science using nothing but duct tape, Sharpies, and Scotch-Brite. He also raised my appreciation for the artistry of engineer- ing. My thanks also go to the many undergraduate students who assisted in the construction of the experiment, especially Craig Jacobson who performed graduate-level work. My research partner, Erik Spence, deserves particular thanks for his tireless efforts in modeling the experiment. His persnickety emendations were especially appreciated as we entered the publi- cation stage of the experiment. The conversations during our morning commute to the lab will be sorely missed. I never imagined forging such a strong friendship with a colleague, and I hope our families remain close despite great distance. -

Excitation and Control of a High-Speed Induction Generator
Excitation and Control of a High-Speed Induction Generator by Steven Carl Englebretson S.B., Colorado School of Mines (Dec 2002) Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree of Master of Science at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY September 2005 @ Massachusetts Institute of Technology, MMV. All rights reserved. A uth or .............................. .. ....... I/.. .. ................. Department of Electrical Engineering and Computer Science August 26, 2005 Certified by ....... .... .............. /1 James L. Kirtley Jr. Professor of Electrical Engineering I Thesis Supervisor Accepted by....................... .............. ............ Arthur C. Smith Chairman, Department Committee on Graduate Students MASSACHUSETTS INSIT=EU OF TECHNOLOGY BARKER MAR 2 8"2006 LIBRARIES - 11 - I Excitation and Control of a High-Speed Induction Generator by Steven Carl Englebretson Submitted to the Department of Electrical Engineering and Computer Science on August 26, 2005, in partial fulfillment of the requirements for the degree of Master of Science Abstract This project investigates the use of a high speed, squirrel cage induction generator and power converter for producing DC electrical power onboard ships and submarines. Potential advantages of high speed induction generators include smaller size and weight, increased durability, and decreased cost and maintenance. Unfortunately, induction generators require a "supply of reactive power" to run and suffer from variation in output voltage and frequency with any changes to the input reactive power excitation, mechanical drive speed, and load. A power converter can resolve some of these issues by circulating the changing reactive power demanded by the generator while simultaneously controlling the stator frequency to adjust the machine slip and manage the real output power. -

Brushless DC Electric Motor
Please read: A personal appeal from Wikipedia author Dr. Sengai Podhuvan We now accept ₹ (INR) Brushless DC electric motor From Wikipedia, the free encyclopedia Jump to: navigation, search A microprocessor-controlled BLDC motor powering a micro remote-controlled airplane. This external rotor motor weighs 5 grams, consumes approximately 11 watts (15 millihorsepower) and produces thrust of more than twice the weight of the plane. Contents [hide] 1 Brushless versus Brushed motor 2 Controller implementations 3 Variations in construction 4 AC and DC power supplies 5 KM rating 6 Kv rating 7 Applications o 7.1 Transport o 7.2 Heating and ventilation o 7.3 Industrial Engineering . 7.3.1 Motion Control Systems . 7.3.2 Positioning and Actuation Systems o 7.4 Stepper motor o 7.5 Model engineering 8 See also 9 References 10 External links Brushless DC motors (BLDC motors, BL motors) also known as electronically commutated motors (ECMs, EC motors) are electric motors powered by direct-current (DC) electricity and having electronic commutation systems, rather than mechanical commutators and brushes. The current-to-torque and frequency-to-speed relationships of BLDC motors are linear. BLDC motors may be described as stepper motors, with fixed permanent magnets and possibly more poles on the rotor than the stator, or reluctance motors. The latter may be without permanent magnets, just poles that are induced on the rotor then pulled into alignment by timed stator windings. However, the term stepper motor tends to be used for motors that are designed specifically to be operated in a mode where they are frequently stopped with the rotor in a defined angular position; this page describes more general BLDC motor principles, though there is overlap. -
ALTERNATORS ➣ Armature Windings ➣ Wye and Delta Connections ➣ Distribution Or Breadth Factor Or Winding Factor Or Spread Factor ➣ Equation of Induced E.M.F
CHAPTER37 Learning Objectives ➣ Basic Principle ➣ Stationary Armature ➣ Rotor ALTERNATORS ➣ Armature Windings ➣ Wye and Delta Connections ➣ Distribution or Breadth Factor or Winding Factor or Spread Factor ➣ Equation of Induced E.M.F. ➣ Factors Affecting Alternator Size ➣ Alternator on Load ➣ Synchronous Reactance ➣ Vector Diagrams of Loaded Alternator ➣ Voltage Regulation ➣ Rothert's M.M.F. or Ampere-turn Method ➣ Zero Power Factor Method or Potier Method ➣ Operation of Salient Pole Synchronous Machine ➣ Power Developed by a Synchonous Generator ➣ Parallel Operation of Alternators ➣ Synchronizing of Alternators ➣ Alternators Connected to Infinite Bus-bars ➣ Synchronizing Torque Tsy ➣ Alternative Expression for Ç Alternator Synchronizing Power ➣ Effect of Unequal Voltages ➣ Distribution of Load ➣ Maximum Power Output ➣ Questions and Answers on Alternators 1402 Electrical Technology 37.1. Basic Principle A.C. generators or alternators (as they are DC generator usually called) operate on the same fundamental principles of electromagnetic induction as d.c. generators. They also consist of an armature winding and a magnetic field. But there is one important difference between the two. Whereas in d.c. generators, the armature rotates and the field system is stationary, the arrangement Single split ring commutator in alternators is just the reverse of it. In their case, standard construction consists of armature winding mounted on a stationary element called stator and field windings on a rotating element called rotor. The details of construction are shown in Fig. 37.1. Fig. 37.1 The stator consists of a cast-iron frame, which supports the armature core, having slots on its inner periphery for housing the armature conductors. The rotor is like a flywheel having alternate N and S poles fixed to its outer rim. -

Excitation Systems
Excitation Systems 10 kVA - 35 MVA alternators REGULATORS AND EXCITATION SYSTEMS ARE AT THE HEART OF INDUSTRIAL ALTERNATORS PERFORMANCE AND RELIABILITY. At Leroy-Somer, we design, test and qualify our electronic products to meet the challenges of power generation systems. Using our experience and field expertise, we provide regulation features that help protect installations from outage and failures, and our excitation systems are optimized to provide the best performance levels for any situation. EXCITATION SYSTEMS Leroy-Somer offers different excitation systems to match application requirements. An excitation system uses the alternator output to build an excitation current that is then used to power the rotating magnetic field of the rotor. This principle allows for the control of the output power. To build excitation current, a regulator needs both a supply voltage to provide power, and a measured reference voltage at output terminals to pilot the excitation. Alternator Alternator Main power outputMain power User input N Exciter output User input N Exciter U Sensing + U AVRSensing power supply + V AVR power supply AVR V AVR W W AVR outputAVR + - output + - Exciter current STATOR Exciter current STATOR Exciter Diode Exciter bridgeDiode stator bridge stator Prime Power Exciter Power systemPrime ROTOR supply system rotorExciter supply ROTOR rotor Voltage Voltage - sensing - Control sensing Comp. PID Control Exciter Comp. PID command Exciter Ref + command Main power External Ref + Main power referenceExternal reference Diagram of a complete excitation system SHUNT The SHUNT excitation system can also be completed by a booster system for larger installations to allow In SHUNT excitation systems, the AVR power supply for short circuit capability. -

Generator Technical & Excitation System Specification
CHAPTER- 11 GENERATOR TECHNICAL & EXCITATION SYSTEM SPECIFICATION 11.1 Specifications Typical specifications of a large vertical peaking hydro generators (umbrella/semi umbrella) with static excitation system detailing the requirements of various components of generators and exciter, applicable standards, performance guarantees, erection, testing and commissioning requirements are given below. (Specification for small and other generator may be modified). 11.1.1 Scope (i) Vertical shaft synchronous generators ………. kW at ……….. PF with closed system of ventilation with surface air cooler. (ii) Static excitation system including excitation cubicle and voltage regulating equipment and accessories. (iii) Special provision for peaking operation i.e. brake dust collection system (if required). (iv) Generator transformer connection (Isolated Phase bus duct/segregated phase bus duct) (v) Neutral grounding equipment. (vi) Surge protection equipment, potential transformer. (vii) Generator bus bar current transformers (viii) Carbon dioxide fire extinguishing equipment (ix) Lubrication system (if required). (x) Oil water and air piping with valves and fitting. (xi) Instrumentation, control and safety devices. 11.1.2 Applicable Standards Latest edition of the following standards shall be applicable. IEC-34-1: 1983 – Rotating Electrical Machines Rating and Performance IEC-34-2A-1972 - Rotating Electrical Machines Methods for determining losses and efficiency of electrical machinery from tests (excluding machines for traction vehicles IEC-34-5-1991 – -

Study of a Hybrid Excitation Synchronous Machine: Modeling and Experimental Validation
Mathematical and Computational Applications Article Study of a Hybrid Excitation Synchronous Machine: Modeling and Experimental Validation Salim Asfirane 1,2,* , Sami Hlioui 3, Yacine Amara 1 and Mohamed Gabsi 2 1 GREAH, EA 3220, Université Le Havre Normandie, 25 Rue Philippe Lebon, 76600 Le Havre, France; [email protected] 2 SATIE, CNRS, Ecole Normale Supérieure Paris-Saclay, 61 Avenue du Président Wilson, 94230 Cachan, France; [email protected] 3 SATIE, CNRS, Conservatoire National des Arts et Métiers (CNAM), 292 Rue Saint-Martin, F-75141 Paris CEDEX 03, France; [email protected] * Correspondence: salim.asfi[email protected] or salim.asfi[email protected] Received: 1 February 2019; Accepted: 21 March 2019; Published: 27 March 2019 Abstract: This paper deals with a parallel hybrid excitation synchronous machine (HESM). First, an expanded literature review of hybrid/double excitation machines is provided. Then, the structural topology and principles of operation of the hybrid excitation machine are examined. With the aim of validating the double excitation principle of the topology studied in this paper, the construction of a prototype is presented. In addition, both the 3D finite element method (FEM) and 3D magnetic equivalent circuit (MEC) model are used to model the machine. The flux control capability in the open-circuit condition and results of the developed models are validated by comparison with experimental measurements. The reluctance network model is created from a mesh of the studied domain. The meshing technique aims to combine advantages of finite element modeling, i.e., genericity and expert magnetic equivalent circuit models, i.e., reduced computation time. -

AGN 093 - Excitation System
Application Guidance Notes: Technical Information from Cummins Generator Technologies AGN 093 - Excitation System OVERVIEW An alternator’s excitation system for a typical modern alternator would have the following features: • Rotating field: excitation rotor, rectifier unit and main rotor turning within the main stator. The output power is generated and taken from the main stator. • Brushless: The field is generated by the exciter, rectified to dc and induced into the main rotor winding. • Voltage regulation is controlled by a solid state (electronic) analogue Automatic Voltage Regulator (AVR) or digital AVR, depending on the model. • The AVR may be powered directly from the alternator’s output or from an independent source. The independent source may be, a Permanent Magnet Generator (PMG) or an Auxiliary Winding. The excitation system shown in the block diagram on the next page can be identified as consisting of: • Main Rotor • Exciter Armature • Rotating Rectifier Unit • Exciter Field • AVR • Independent power supply from PMG AGN 093 ISSUE E/1/14 Block Diagram of a complete Excitation System for a Brushless Alternator THE EXCITATION SYSTEM IN OPERATION The high power levels required by the main rotor winding are provided by the exciter armature and its associated rotating diode assembly. Control of the current within the main rotor field winding is achieved by controlling the voltage generated within the exciter armature. Operating the exciter armature at the correct voltage – therefore the main rotor winding at the correct magnitude of magnetising Ampere Turns - is achieved by the AVR dynamically regulating the level of current within the exciter field winding. In the above block diagram, the AVR is shown being powered from a Permanent Magnet Generator. -

Vector Control of PM Synchronous Motor Drive System Using Hysteresis Current Controller
© 2014 IJEDR | Volume 2, Issue 2 | ISSN: 2321-9939 Vector Control of PM Synchronous Motor Drive System Using Hysteresis Current Controller 1Rajesh P. Nathwani, 2Hitesh M. Karkar 1M.E.(Electrical) Student, 2Assistant Prof. 1Electrical Department, 1Atmiya institute of technology & science , Rajkot, India. [email protected], [email protected] ________________________________________________________________________________________________________ Abstract: This paper describes PM SYNCHRONOUS MOTOR Control techniques used in AC drives prevailing in Contemporary market viz, Scalar Control & Vector control(field oriented control).The underlying operating Principle of control schemes are described and indirect vector controlled PM synchronous motor drive has been simulated in MATLAB/Simulink environment. Also hysteresis band pulse width modulated inverter (current controlled VSI) has been implemented using simpower system blocks & the same is used to supply the PM synchronous motor as per the indirect vector control scheme thereby implementing complete indirect vector control drive in closed loop operation. Index Terms- indirect Vector control, PM synchronous motor, Hysteresis Current controller, Closed loop motor drive. ________________________________________________________________________________________________________ I.INTRODUCTION The last decade has seen rapid growth in the field of electrical drives. This growth can be attributed mainly to the advantages offered by both power and signal electronics; hence giving rise to powerful microcontroller and DSP. These technological improvements have allowed the development of very effective AC drives controls. Now days many industrial applications which require electrical drive demand precise speed and torque control, to increase production quality. More ever proper control of these drives using modern control schemes also improves systems efficiency. For application requiring precise control previously DC drives preferred because of their inherent ability to give independent speed and torque control. -

Excitation System of Alternator
International Journal of Engineering Research & Technology (IJERT) ISSN: 2278-0181 Vol. 2 Issue 2, February - 2013 Excitation System Of Alternator 1. Mithul S. There 2. Pragati S. Chawardol 3. Deepali R. Badre Assistant professor in Balaji Polytechnic, Wani (M.S.) field current is supplied and controlled by excitation ABSTRACT system. he amount of excitation required to maintain the output voltage constant is a function of the The brush gear and slip-ring have become such a generator load. vital part that requires high maintenance and are source of failures, thus forming weak links in the system.ith the advent of mechanically robust silicon diode capable of converting AC to DC at a high As the generator load increases, the amount of power level. This paper presents brushless excitation excitation increases. system which overcomes these faults and has become popular and being employed.. The field excitation is II. BASIC KINDS OF EXCITERS provided by a standard brushless excitation system A. Static exciters (shunt and series) which consist of rotating armature diode, diode In static excitation system, the excitation power is bridge and stationary field. The proposed system derived from the generator output through an captures important characteristics of alternator that excitation transformer. include excitation of alternator as well as voltage In 210 MW set, the primary voltage of excitation control method. transformer is 15—75 Kv.lt steps down to 575V (SCR) bridge or thyristor bridge. I. INTRODUCTION B. Rotating Exciters (Brush and brushless) The commercial birth of the alternator can be dated In the system DC power source is of rotating type, back to august 24 1891 at Germany, so the natural which in normally coupled to the main generator choice for the field system was To achieve high rotor. -

Dc Motor Power Control.Pdf
Chapter 1 Introduction 1.1 Introduction Design and implementation of a motor speed controller is a necessary device in our daily life. From the very beginning and till now a lot of methods for motor speed control have been introduced. That is a basic fact that in today’s world costs of all forms of energy are increasing. Therefore in our project and thesis, we have tried to construct a system design to run a motor with economically, efficiently and also power saving. The device presented here makes the motor to control its speed smoothly. Moreover it will allow the motor to run in accordance to the necessary speed. That is let in the summer the temperature is high, then the motor will run with high speed and that will fall with falling in the temperature. Additionally we can also switch the motor ON and OFF from whatever the distance is. 1.2 Historical background The basic principles of electromagnetic induction were discovered in the early 1800's by Oersted, Gauss, and Faraday. In 1819, Hans Christian Oersted and Andie Marie Ampere discovered that an electric current produces a magnetic field. The next 15 years saw a flurry of cross-Atlantic experimentation and innovation. Finally using the principles developed by Michael Faraday and Joseph Henry, he built the first electric motor in 1834. However the first modern DC motor was invented in 1873. Five years later; these motors got microprocessor improvements that were mainly used in car dispatch and motor drive controllers. The induction motor was first realized by Galileo Ferraris in 1885 in Italy. -
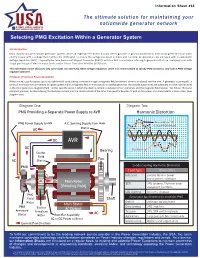
Selecting PMG Excitation Within a Generator System the Ultimate
Information Sheet #65 The ultimate solution for maintaining your nationwide generator network ULTIMATE SERVICE ASSOCIATES A NORTH AMERICAN SITE SERVICES CO. Selecting PMG Excitation Within a Generator System 1.0 Introduction: Most standby and prime power generator systems utilize an engine/prime-mover (usually diesel, gasoline or gaseous powered) to drive an AC generator to produce electric power with a voltage that matches the utility grid. To ensure the voltage produced is stable and constant, AC generators are equipped with an Automatic Voltage Regulators (AVR). Frequently the term Permanent Magnet Generator (PMG) Excitation AVR is used when referring to generators that are supplying loads with a high percentage of electric motor loads and/or Silicon Controlled Rectifier (SCR) loads. This Information Sheet discusses why some loads can adversely effect voltage regulation, when it is recommended to specify PMG excitation, and how a PMG voltage regulator operates. 2.0 Basics of Electrical Power Generation: When a wire, usually copper due to its high level of conductivity, is moved through a magnetic field an electric current is induced into the wire. A generator is principally a series of wire coils that are rotated at a given speed within a magnetic field. In the case of a brushless generator, the outside stator wires are stationary and the internal wires in the rotor generate a magnetic field. In this case the wires in which the electric current is induced remain stationary and the magnetic field rotates. This follows the same electrical principal, but by inducing the electrical current into the stator instead of the rotor, the need for brushes to pick up the power via a commutator is eliminated.