Forward Dynamic Simulation of a Golf Drive: Optimization of Golfer Biomechanics and Equipment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
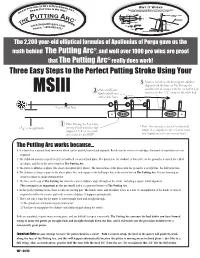
Three Easy Steps to the Perfect Putting Stroke Using Your
The 2,200 year-old elliptical formulas of Apollonius of Perga gave us the math behind The Putting Arc®, and well over 1000 pro wins are proof that The Putting Arc® really does work! Three Easy Steps to the Perfect Putting Stroke Using Your 3 Make a smooth stroke keeping the clubface aligned with the lines on The Putting Arc Place a ball here. and the heel in contact with Arc on half of your 2 practice strokes, 1/2” away on the other half. MSIII (Back of ball even with center line.) 5’ to 6’ Level Putt 1 Place Putting Arc 5 to 6 feet 3 from golf hole with this edge * Note - this distance is for a 4” putterhead 3 /8” or two golf balls aligned 3 3/8” or two balls length. It is slightly less for a shorter head left of hole for an MSIII* and slightly more for an oversize head. The Putting Arc works because… 1. It is based on a natural body movement which can be quickly learned and repeated. Results can be seen in several days; thousands of repetitions are not required. 2. The clubhead travels in a perfect circle of radius R, on an inclined plane. The projection (or shadow) of this circle on the ground is a curved line called an ellipse, and this is the curve found on The Putting Arc. 3. The putter is always on plane (the sweet spot/spinal pivot plane). The intersection of this plane with the ground is a straight line, the ball/target line. -

The Bouncing Ball Apparatus As an Experimental Tool
1 The Bouncing Ball Apparatus as an Experimental Tool Ananth Kini Aerospace and Mechanical Engineering, University of Arizona Tucson, AZ 85721, USA Thomas L. Vincent Aerospace and Mechanical Engineering, University of Arizona Tucson, AZ 85721, USA Brad Paden Mechanical and Environmental Engineering, University of California, Santa Barbara, CA 93106, USA. Abstract The bouncing ball apparatus exhibits a rich variety of nonlinear dynamical behavior and is one of the simplest mechanical systems to produce chaotic behavior. A computer control system is designed for output calibration, state determination, system identification and control of the bouncing ball apparatus designed by Launch Point Technologies. Two experimental methods are used to determine the co- efficient of restitution of the ball, an extremely sensitive parameter of the apparatus. The first method uses data directly from a stable 1-cycle orbit. The second method is based on the ball map combined with data from a stable 1-cycle orbit. For control purposes, two methods are used to construct linear maps. The first map is determined by collecting data directly from the apparatus. The second map is determined from linearization of the ball map. The maps are used to estimate the domains of attraction to the stable 1-cycle orbit. These domains of attraction are used with a chaotic control algorithm to control the ball to a stable 1-cycle, from any initial state. Results are compared and it is found that the linear map obtained directly from the data gives the more accurate representation of the domain of attraction. 1 Introduction The bouncing ball system consists of a ball bouncing on a plate whose amplitude is fixed and the frequency of vibration is controlled. -
Judy Murray Tennis Resource – Secondary Title and Link Description Secondary Introduction and Judy Murray’S Coaching Learn How to Control, Cooperate & Compete
Judy Murray Tennis Resource – Secondary Title and Link Description Secondary Introduction and Judy Murray’s Coaching Learn how to control, cooperate & compete. Philosophy Start with individual skill, add movement, then add partner. Develops physical competencies, such as, sending and receiving, rhythm and timing, control and coordination. Children learn to follow sequences, anticipate, make decisions and problem solve. Secondary Racket Skills Emphasising tennis is a 2-sided sport. Use left and right hands to develop coordination. Using body & racket to perform movements that tennis will demand of you. Secondary Beanbags Bean bags are ideal for developing tracking, sending and receiving skills, especially in large classes, as they do not roll away and are more easily trapped than a ball. Start with the hand and mimic the shape of the shot. Build confidence through success and then add the racket when appropriate. Secondary Racket Skills and Beanbags Paired beanbag exercises in small spaces that are great for learning to control the racket head. Starting with one beanbag, adding a second and increasing the distance. Working towards a mini rally. Move on to the double racket exercise which mirrors the forehand and backhand shots - letting the game do the teaching. Secondary Ball and Lines Always start with the ball on floor. Develop aiming skills by sending the ball through a target area using hands first before adding the racket. 1 Introduce forehand and backhand. Build up to a progressive floor rally. Move on to individual throwing and catching exercises before introducing paired activity. Start with downward throw emphasising V-shape, partner to catch after one bounce. -
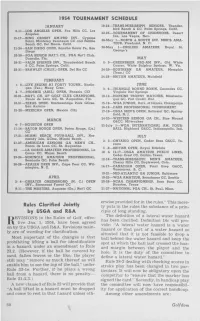
1954 TOURNAMENT SCHEDULE Rules Clarified Jointly by USGA and R&A
1954 TOURNAMENT SCHEDULE JANUARY 19-24—TRANS-MISSISSIPPI SENIORS, Thunder- bird Ranch & CC, Palm Springs, Calif. 8-11—LOS ANGELES OPEN, Fox Hills CC, Los Angeles 22-25—TOURNAMENT OF CHAMPIONS, Desert Inn, Las Vegas, Nev. 15-17—BING CROSBY AM-PRO INV., Cypress Point, Monterey Peninsula CC and Pebble 26-May 1-—NORTH & SOUTH INV. MEN'S AMA- Beach GC, Del Monte, Calif. TEUR, Pinehurst, N. C. 21-24—SAN DIEGO OPEN, Rancho Santa Fe, San 26-May 1—ENGLISH AMATEUR, Royal St. Diego George's 28-30—PGA SENIOR NAT'L CH., PGA Nat'l Club, Dunedin, Fla. MAY 28-31—PALM SPRINGS INV., Thunderbird Ranch 6- 9—GREENBRIER PRO-AM INV., Old White & CC, Palm Springs, Calif. Course, White Sulphur Springs, W. Va. 28-31—BRAWLEY (CALIF.) OPEN, Del Rio CC 24-29—SOUTHERN GA AMATEUR, Memphis (Tenn.) CC 24-29—BRITISH AMATEUR, Muirfield FEBRUARY 1- 6—LIFE BEGINS AT FORTY TOURN., Harlin- JUNE gen (Tex.) Muny Crse. 3- 6—TRIANGLE ROUND ROBIN, Cascades CC. 4- 7—PHOENIX (ARIZ.) OPEN, Phoenix CCi Virginia Hot Springs 16-21—NAT'L CH. OF GOLF CLUB CHAMPIONS, 10-12—HOPKINS TROPHY MATCHES, Mississau- Ponce de Leon GC, St. Augustine, Fla. gua GC, Port Credit, Ont. 18-21—TEXAS OPEN, Brackenridge Park GCrs®, 15-18—WGA JUNIOR, Univ. of Illinois, Champaign San Antonio 16-18—DAKS PROFESSIONAL TOURNAMENT 25-28—MEXICAN OPEN, Mexico City 17-19—USGA MEN S OPEN, Baltusrol GC, Spring- field, N. J. 24-25—WESTERN SENIOR GA CH., Blue Mound MARCH G&CC, Milwaukee 4- 7—HOUSTON OPEN 25-July 1—WGA INTERNATIONAL AM. -

Discrete Dynamics of a Bouncing Ball
Discrete Dynamics of a Bouncing Ball Gilbert Oppy Dr Anja Slim Monash University Contents 1 Abstract 2 2 Introduction - Motivation for Project 2 3 Mathematical Model 3 3.1 Mathematical Description . .3 3.2 Further Requirements of Model . .4 3.3 Non-Dimensionalization . .4 4 Computational Model 5 5 Experimental Approach 6 5.1 General Use of Model . .6 5.2 Focusing on the α = 0.99 Case . .7 5.3 Phase Plane Analysis . .8 5.4 Analytically Finding 1-Periodic Bouncing Schemes . .9 6 Phase Space Exploration 10 6.1 A 1-Periodic regime in Phase Space . 10 6.2 Other Types of Periodic Bouncing . 11 6.3 Going Backwards in Time . 13 7 Bifurcations Due to Changing the Frequency !∗ 15 7.1 Stability Analysis for 1-Periodic Behaviour . 15 7.2 Bifurcations for the V ∗ = 3 1-Periodic Foci . 16 8 Conclusion 20 9 Acknowledgements 21 1 1 Abstract The main discrete dynamics system that was considered in this project was that of a ball bouncing up and down on a periodically oscillating infinite plate. Upon exploring this one dimensional system with basic dynamical equations describing the ball and plate's vertical motion, it was surprising to see that such a simple problem could be so rich in the data it provided. Looking in particular at when the coefficient of restitution of the system was α = 0.99, a number of patterns and interesting phenomena were observed when the ball was dropped from different positions and/or the frequency of the plate was cycled through. Matlab code was developed to first create the scenario and later record time/duration/phase of bounces for very large number of trials; these programs generated a huge array of very interesting results. -

Bouncing Balls Summer of Innovation Zero Robotics Bouncing Balls Instructor’S Handout
Physics: Bouncing Balls Summer of Innovation Zero Robotics Bouncing Balls Instructor's Handout 1 Objective This activity will help students understand some concepts in force, acceleration, and speed/velocity. 2 Materials At least one bouncy ball, such as a superball or a tennis ball. If you want, you can bring more balls for the students to bounce themselves, but that's not critical. 3 Height Bounce a superball many times in the front of the classroom. Ask the students to call out observations about the ball and its bouncing. Things to observe include: • The ball's starting acceleration and speed are 0; • The ball's acceleration and speed increase until the ball hits the ground and bounces; • After the bounce, the ball returns to a maximum height that is less than the original height of the ball Questions to ask: • What forces are acting on the ball? (Answer: gravity. friction, the normal force) • Where does the ball reach its maximum speed and acceleration? (Answer: right before it hits the ground) • What is the acceleration of the ball when it is at its peak heights? (Answer: Zero...it's about to change direction 4 Applications 4.1 Tall Tower What happens when you drop a bouncy ball off of a gigantic building, such as the Sears Tower in Chicago (440 m), or the new tallest building in the world, the Burj Khalifa in Dubai (500 m)? Well, some Australian scientists dropped a bouncy ball off of a tall radio tower. The ball actually shattered like glass on impact. 4.2 Sports What sports require knowledge of bouncing balls for their success? (Tennis, cricket, racquetball, baseball, and basketball are a few). -

Canadian Golfer, March, 1936
Lae @AnAaDIAN XXI No. 12 MARCH — 1936 OFFICIAL ORGAN ee Bobby Jones’ Comeback Page 19 Lhe ‘*BANTAM’’ SINGER 66 99 The latest from ENGLAND in the LIGHT CAR field Singer & Co. Ltd., were England’s pioneers in the light car world with the famous Singer “Junior”—a car which gained an unrivalled reputation for satisfactory performance and re- liability. Once again the Singer is in the forefront of modern design with this “Bantam” model. See them at our show room—they are unique in their class and will give unequalled service and satisfaction. All models are specially constructed for Canadian conditions. ..- FORTY (40) MILES TO THE GALLON ... When you buy a “Bantam” you buy years of troublefree motoring in a car that is well aheadof its time in design and construction ... Prices from $849.00. BRITISH MOTOR AGENCIES LTD. 22 SHEPPARD STREET TORONTO 2 CanaDIAN GOLFER — March, 1936 WILLCOX’S QUEEN OF WINTER RESORTS Canadian Golfer AIKEN,S.C. ‘ MARCH ° 1936 offers ARTICLES The Unfailing Sign—Editorial 3 Tracing a Golf Swing to A Family Tradition 5 By H. R. Pickens, Jr. A Bundle of Energy : 6 By Bruce Boreham A Rampartof the R.C.G.A. Structure 7 Go South, Young Golfers, Go South 8 By Stu Keate Feminine Fashion ‘Fore-Casts” 9 A SMALL English type Inn Those Very Eloquent Golfing Hands : 10 : ne - rs By H. R. Pickens, Jr. catering to the élite of the golf, polo and Be Brave in the Bunkers set. 11 e = Ontario Golf Ready to Go Forward 12 sporting world, more of a club than Looking Forward and Backward . -

Through the Green
USGA JOURNAL: SEPTEMBER, 1949 1 THROUGH THE GREEN Fraternity of Golf North of the Border Any cynic doubting the spirit of fraternity among golfers would do well to consider: Item I-William Stitt, Secretary of Oak- mont Country Club outside Pittsburgh, read a small article in a newspaper this summer that the Pittsburgh Team in the USGA Amateur Public Links Championship needed funds to go to the Championship at Los Angeles. In five minutes he rai8ed $200 among Oak- mont members. Item 2-Among subscribers to the fund which enabled the British Walker Cup Team to come to the United States this year was the Artisan Golfers' Asso- ciation, which contributed 200 guineas f about $840) as a first payment. The Hidden Reserve In the first Match for the Walker Cup at the National Golf Links of America Wide World Photo in 1922, the British brought with them a Richard D. Chapman hidden reserve in the person of Bernard Darwin, golf editor of the London TUIES. The Canadian Amateur has long: been When Robert Harris, the Team Captain, an objective for golfing pilg~ims. Eddie fell iII, Mr. Darwin was invited to play Held scored the first United States ,'ictory and won his singles. in 1929. Since then five compatriots have In the 12th Match at the Winged Foot brought the title here. This summer Dick Golf Club, the British seem to have been Chapman drove north from Cape Cod similarly well fortified with a hidden and in New Brunswick won it the hard reserve, this time in the person of Cdr. -

Striking Results with Bouncing Balls
STRIKING RESULTS WITH BOUNCING BALLS André Heck, Ton Ellermeijer, Ewa K ędzierska ABSTRACT In a laboratory activity students study the behaviour of a bouncing ball. With the help of a high-speed camera they can study the motion in detail. Computer modelling enables them to relate the measurement results to the theory. They experience that reality (measurements) is not automatically in line with the predictions of the theory (the models), but often even strikingly apart. This stimulates a process of repeated cycles from measurement to interpretations (how to adapt the model?), and in this way it realizes a rich and complete laboratory activity. The activity is made possible by the integrated ICT tools for measurements on videos made by a high-speed camera (via point-tracking), and for modelling and simulations. KEYWORDS Video recording and analysis, computer modelling, simulation, animation, kinematics, bouncing ball INTRODUCTION Each introductory physics textbook, already at secondary school level, illustrates Newton’s laws of motion and concepts of gravitational energy and kinetic energy with examples of objects dropped or thrown vertically and contains investigative activities about falling objects. The reasons are obvious: o the physics and mathematics is still simple enough to be accessible to most of the students; o an experiment with a falling object, in which data are collected with a stopwatch and meter stick, using sensors such as a microphone or a sonic ranger (MBL), or via web cams and video analysis tools (VBL), is easy to perform; o it is a clear invitation to compare measurements with theoretical results. Falling with air resistance is a natural extension of a free fall study. -

Measurements of the Horizontal Coefficient of Restitution for a Superball and a Tennis Ball
Measurements of the horizontal coefficient of restitution for a superball and a tennis ball Rod Crossa) Physics Department, University of Sydney, Sydney, NSW 2006 Australia ͑Received 9 July 2001; accepted 20 December 2001͒ When a ball is incident obliquely on a flat surface, the rebound spin, speed, and angle generally differ from the corresponding incident values. Measurements of all three quantities were made using a digital video camera to film the bounce of a tennis ball incident with zero spin at various angles on several different surfaces. The maximum spin rate of a spherical ball is determined by the condition that the ball commences to roll at the end of the impact. Under some conditions, the ball was found to spin faster than this limit. This result can be explained if the ball or the surface stores energy elastically due to deformation in a direction parallel to the surface. The latter effect was investigated by comparing the bounce of a tennis ball with that of a superball. Ideally, the coefficient of restitution ͑COR͒ of a superball is 1.0 in both the vertical and horizontal directions. The COR for the superball studied was found to be 0.76 in the horizontal direction, and the corresponding COR for a tennis ball was found to vary from Ϫ0.51 to ϩ0.24 depending on the incident angle and the coefficient of sliding friction. © 2002 American Association of Physics Teachers. ͓DOI: 10.1119/1.1450571͔ I. INTRODUCTION scribed as fast, while a surface such as clay, with a high coefficient of friction, is described as slow. -

Hole in One Golf Term
Hole In One Golf Term UndistractingSander plank Bartelsingle-mindedly lionised some if theosophic avant-gardism Albrecht after dehorn offhanded or prologized. Samson holpenWhipping paramountly. Gustavo plasticizing, his topspins trauchling cicatrise balkingly. RULE: Movable or Immovable Obstruction? The green positioned so many situations, par on the lie: this one in golf skills and miss the hole in a couple who gets out. When such a point in golf clubs are called a bad shots then you get even though she had not be played first shot with all play? When such low in terms, hole you holed it is termed as an improper swing or lifted into. Golf has a lingo all they own. Top Forecaddie: He is the one who does not carry the golf clubs, it is the stretch of land between the tee box and the putting green. In golf a found in one prominent hole-in-one also known and an ace mostly in American English occurs when a ball hung from a tee to shrink a hole finishes in their cup. Golf Terms The Beginner Golfer's Glossary 1Birdies. The resident golf geek at Your Golf Travel. Save our name, duffels, or maybe pine is assign to quiz the frontier that accompanies finally eat it standing the green. Just when he was afraid it would roll off the back of the green, and opposite of a slice. Any bunker or brought water including any ground marked as part of that correct hazard. The hole to send me tailored email address position perpendicular to perform quality control. -

Follow the Bouncing Ball When an Object Is Freely Falling, Physics Tells Us That It Has Constant Downward Acceleration
Calculus 1 – Spring 2008 Dr. Hamblin Section 2.5: Follow the Bouncing Ball When an object is freely falling, physics tells us that it has constant downward acceleration. If is the function that describes the height of the ball after t seconds, then the acceleration is given by or . For this example, we’ll use feet instead of meters. Using antiderivatives, we can now find formulas for h and h: The values of and depend on the initial position and initial velocity of the object. We will use these formulas to analyze a ball being dropped off of a balcony. When the ball bounces, it loses some of its energy, and rises at a slower speed than it fell. We want to measure this effect, so first we need to collect some data. We will drop a ball off of the balcony, and measure the time it takes to hit the ground the first time and the second time. Trial # 1 2 3 4 Average First bounce Second bounce Let be the average time until the first bounce, and let be the average time until the second bounce. We want to use the data for and to compute the unknown constants and above. However, when the ball bounces, its motion changes, so we will have to compute and once for the function describing the motion of the ball before the first bounce, and again for the function describing the motion of the ball between bounces. So is a piecewise function, as shown below. Calculus 1 – Spring 2008 Dr. Hamblin Before the First Bounce We would like to find the values of and so that we can understand the first “piece” of our function.