High-Fidelity Trajectory Design to Flyby Near-Earth Asteroids Using Cu- Besats P
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
![[Paper Number]](https://docslib.b-cdn.net/cover/9333/paper-number-19333.webp)
[Paper Number]
NASA’s Space Launch System: Deep-Space Delivery for Smallsats Dr. Kimberly F. Robinson1 and George Norris2 NASA Marshall Space Flight Center, Huntsville, AL, 35812 ABSTRACT Designed for human exploration missions into deep space, NASA’s Space Launch System (SLS) represents a new spaceflight infrastructure asset, enabling a wide variety of unique utilization opportunities. While primarily focused on launching the large systems needed for crewed spaceflight beyond Earth orbit, SLS also offers a game-changing capability for the deployment of small satellites to deep-space destinations, beginning with its first flight. Currently, SLS is making rapid progress toward readiness for its first launch in two years, using the initial configuration of the vehicle, which is capable of delivering 70 metric tons (t) to Low Earth Orbit (LEO). On its first flight test of the Orion spacecraft around the moon, accompanying Orion on SLS will be small-satellite secondary payloads, which will deploy in cislunar space. The deployment berths are sized for “6U” CubeSats, and on EM-1 the spacecraft will be deployed into cislunar space following Orion separate from the SLS Interim Cryogenic Propulsion Stage. Payloads in 6U class will be limited to 14 kg maximum mass. Secondary payloads on EM-1 will be launched in the Orion Stage Adapter (OSA). Payload dispensers will be mounted on specially designed brackets, each attached to the interior wall of the OSA. For the EM-1 mission, a total of fourteen brackets will be installed, allowing for thirteen payload locations. The final location will be used for mounting an avionics unit, which will include a battery and sequencer for executing the mission deployment sequence. -

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -
Solar Sail Propulsion for Deep Space Exploration
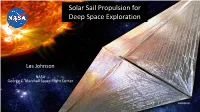
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -
Stardust Comet Flyby
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Stardust Comet Flyby Press Kit January 2004 Contacts Don Savage Policy/Program Management 202/358-1727 NASA Headquarters, Washington DC Agle Stardust Mission 818/393-9011 Jet Propulsion Laboratory, Pasadena, Calif. Vince Stricherz Science Investigation 206/543-2580 University of Washington, Seattle, WA Contents General Release ……………………………………......………….......................…...…… 3 Media Services Information ……………………….................…………….................……. 5 Quick Facts …………………………………………..................………....…........…....….. 6 Why Stardust?..................…………………………..................………….....………......... 7 Other Comet Missions ....................................................................................... 10 NASA's Discovery Program ............................................................................... 12 Mission Overview …………………………………….................……….....……........…… 15 Spacecraft ………………………………………………..................…..……........……… 25 Science Objectives …………………………………..................……………...…........….. 34 Program/Project Management …………………………...................…..…..………...... 37 1 2 GENERAL RELEASE: NASA COMET HUNTER CLOSING ON QUARRY Having trekked 3.2 billion kilometers (2 billion miles) across cold, radiation-charged and interstellar-dust-swept space in just under five years, NASA's Stardust spacecraft is closing in on the main target of its mission -- a comet flyby. "As the saying goes, 'We are good to go,'" said project manager Tom Duxbury at NASA's Jet -

+ New Horizons
Media Contacts NASA Headquarters Policy/Program Management Dwayne Brown New Horizons Nuclear Safety (202) 358-1726 [email protected] The Johns Hopkins University Mission Management Applied Physics Laboratory Spacecraft Operations Michael Buckley (240) 228-7536 or (443) 778-7536 [email protected] Southwest Research Institute Principal Investigator Institution Maria Martinez (210) 522-3305 [email protected] NASA Kennedy Space Center Launch Operations George Diller (321) 867-2468 [email protected] Lockheed Martin Space Systems Launch Vehicle Julie Andrews (321) 853-1567 [email protected] International Launch Services Launch Vehicle Fran Slimmer (571) 633-7462 [email protected] NEW HORIZONS Table of Contents Media Services Information ................................................................................................ 2 Quick Facts .............................................................................................................................. 3 Pluto at a Glance ...................................................................................................................... 5 Why Pluto and the Kuiper Belt? The Science of New Horizons ............................... 7 NASA’s New Frontiers Program ........................................................................................14 The Spacecraft ........................................................................................................................15 Science Payload ...............................................................................................................16 -

Giant Planet / Kuiper Belt Flyby
Giant Planet / Kuiper Belt Flyby Amanda Zangari (SwRI) Tiffany Finley (SwRI) with Cecilia Leung (LPL/SwRI) Simon Porter (SwRI) OPAG: February 23, 2017 Take Away • New Horizons provided scientifically valuable exploration of the Kuiper Belt in the New Frontiers cost cap. • The Kuiper Belt is full of objects with a diverse range of stories that go beyond what we learned from Pluto. • Giant Planet flybys add scientific value to a Kuiper Belt mission • Found preliminary trajectory examples for high interest KBOs-- Haumea, Varuna, 2015 RR245 can be reached via Jupiter AND Saturn, Uranus or Neptune flyby in the 2030s. • To be a candidate New Frontiers mission, a 2 Giant planet+KBO mission must be endorsed by a decadal survey according to current rules. New Horizons Heritage NH Jupiter Encounter planned around Pluto flyby timing, which was dominated by achieving quadruple occultations, “interesting” side up. New Horizons Heritage Pluto flyby took advantage of Ecliptic crossing, enabling access to the cold classical belt (where 2014 MU69 is located). New Horizons Heritage 2014 MU69 discovered while in flight. Targeting was from spacecraft propulsion and took advantage of cold classical population density. Object is small, reddish ~40 km diameter. Saturn’s moons show incredible diversity NASA/JPL As do Uranus and Neptune Some Kuiper Belt Geography Where do we want to go? Getting there- JGA “anytime” New Horizons model: Fast Launch, Jupiter Flyby, Launch window every 11 years McGranaghan et al 2011 Can we go to more than just Jupiter? If so, where, what? New Horizons 2 • 2008 launch using New Horizons flight spares • Proposed Jupiter flyby, equinox flyby of Uranus, and flyby of (47171) 1999 TC36 (now know to be trinary). -

NASA's MESSENGER Sends Flyby Data to Earth Using
Press Release For immediate release Special Delivery: NASA’s MESSENGER Sends Flyby Data to Earth Using CCSDS File Delivery Protocol Developed for Deep Space by International Team WASHINGTON, Aug. 10 (CCSDS) – NASA’s MESSENGER team is using the CCSDS File Delivery Protocol (CFDP), a highly specialized protocol designed to overcome space operations communications challenges, to download data captured during a successful flyby of Earth last week. A team of international space data communications experts, collaborating through the Consultative Committee for Space Data Systems (CCSDS), developed CFDP to reliably and efficiently downlink files from a spacecraft even in the strenuous environment of deep space. Since the MESSENGER spacecraft’s launch a year ago, it has successfully used CFDP to enable mission communications and will use it throughout its 7.9-billion kilometer journey to Mercury. In using CFDP, MESSENGER communications represents a change in the standard method of storing science and housekeeping data on spacecraft built by the Johns Hopkins University Applied Physics Laboratory (JHU/APL). MESSENGER is also the first U.S. space flight mission to use CFDP in mission operations. Prior to MESSENGER, JHU/APL missions used a raw storage model of storing data, but new mission and operational requirements meant that MESSENGER would have to incorporate a file system of data storage into its spacecraft software architecture. A reliable method of downlinking files to the ground had to be found and CFDP was chosen by mission planners to do the job. CFDP is included in the MESSENGER software architecture through a reuse of a NASA Jet Propulsion Lab (NASA JPL) implementation on the ground and a JHU/APL “CFDP-lite” implementation on the flight side. -

Mariner to Mercury, Venus and Mars
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Mariner to Mercury, Venus and Mars Between 1962 and late 1973, NASA’s Jet carry a host of scientific instruments. Some of the Propulsion Laboratory designed and built 10 space- instruments, such as cameras, would need to be point- craft named Mariner to explore the inner solar system ed at the target body it was studying. Other instru- -- visiting the planets Venus, Mars and Mercury for ments were non-directional and studied phenomena the first time, and returning to Venus and Mars for such as magnetic fields and charged particles. JPL additional close observations. The final mission in the engineers proposed to make the Mariners “three-axis- series, Mariner 10, flew past Venus before going on to stabilized,” meaning that unlike other space probes encounter Mercury, after which it returned to Mercury they would not spin. for a total of three flybys. The next-to-last, Mariner Each of the Mariner projects was designed to have 9, became the first ever to orbit another planet when two spacecraft launched on separate rockets, in case it rached Mars for about a year of mapping and mea- of difficulties with the nearly untried launch vehicles. surement. Mariner 1, Mariner 3, and Mariner 8 were in fact lost The Mariners were all relatively small robotic during launch, but their backups were successful. No explorers, each launched on an Atlas rocket with Mariners were lost in later flight to their destination either an Agena or Centaur upper-stage booster, and planets or before completing their scientific missions. -

EPOXI COMET ENCOUNTER FACT SHEET Nov
EPOXI COMET ENCOUNTER FACT SHEET Nov. 2, 2010 Quick Facts Flyby Spacecraft Dimensions: 3.3 meters (10.8 feet) long, 1.7 meters (5.6 feet) wide, and 2.3 meters (7.5 feet) high Weight: 601 kilograms (1,325 pounds) at launch, consisting of 517 kilograms (1,140 pounds) spacecraft and 84 kilograms (185 pounds) fuel. On 10/25/10 there was 4 kilograms (8.8 pounds) of fuel remaining. Power: 2.8-meter-by-2.8-meter (9-foot-by-9 foot) solar panel providing up to 750 watts, depending on distance from sun. Power storage via small, 16-amp- hourrechargeable nickel hydrogen battery Comet Hartley 2 Nucleus shape: Elongated Nucleus size (estimated): About 2.2 kilometers (1.4 miles) long Nucleus mass: Roughly 280 million metric tons Nucleus rotation period: About 18 hours Nucleus composition: Water ice, carbon dioxide ice, silicate dust Mission Launch: Jan. 12, 2005 Launch site: Cape Canaveral Air Force Station, Florida Launch vehicle: Delta II 7925 with Star 48 upper stage Impact with Tempel 1: 10:52 p.m. PDT July 3, 2005 (1:52 a.m. EDT July 4, 2005) Earth-comet distance at time of impact: 133.6 million kilometers (83 million miles) Total distance traveled by spacecraft from Earth to Tempel 1: 431 million kilometers (268 million miles) Flyby of Hartley 2: About 10 a.m. EDT or 7 a.m. PDT Nov. 4, 2010 Additional distance traveled by spacecraft to Hartley 2: About 4.6 billion kilometers (2.9 billion miles) Program Cost of Deep Impact: $267 million total (not including launch vehicle), consisting of $252 million spacecraft development and $15 million mission operations Cost of EPOXI extended mission: $42 million, for operations from 2007 to end of project at the end of fiscal year 2011. -

Method for Rapid Interplanetary Trajectory Analysis Using Δv Maps with Flyby Options
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by DSpace@MIT METHOD FOR RAPID INTERPLANETARY TRAJECTORY ANALYSIS USING ΔV MAPS WITH FLYBY OPTIONS TAKUTO ISHIMATSU*, JEFFREY HOFFMAN†, AND OLIVIER DE WECK‡ Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge, MA 02139, USA. Email: [email protected]*, [email protected]†, [email protected]‡ This paper develops a convenient tool which is capable of calculating ballistic interplanetary trajectories with planetary flyby options to create exhaustive ΔV contour plots for both direct trajectories without flybys and flyby trajectories in a single chart. The contours of ΔV for a range of departure dates (x-axis) and times of flight (y-axis) serve as a “visual calendar” of launch windows, which are useful for the creation of a long-term transportation schedule for mission planning purposes. For planetary flybys, a simple powered flyby maneuver with a reasonably small velocity impulse at periapsis is allowed to expand the flyby mission windows. The procedure of creating a ΔV contour plot for direct trajectories is a straightforward full-factorial computation with two input variables of departure and arrival dates solving Lambert’s problem for each combination. For flyby trajectories, a “pseudo full-factorial” computation is conducted by decomposing the problem into two separate full-factorial computations. Mars missions including Venus flyby opportunities are used to illustrate the application of this model for the 2020-2040 time frame. The “competitiveness” of launch windows is defined and determined for each launch opportunity. Keywords: Interplanetary trajectory, C3, delta-V, pork-chop plot, launch window, Mars, Venus flyby 1. -

KPLO, ISECG, Et Al…
NationalNational Aeronautics Aeronautics and Space and Administration Space Administration KPLO, ISECG, et al… Ben Bussey Chief Exploration Scientist Human Exploration & Operations Mission Directorate, NASA HQ 1 Strategic Knowledge Gaps • SKGs define information that is useful/mandatory for designing human spaceflight architecture • Perception is that SKGs HAVE to be closed before we can go to a destination, i.e. they represent Requirements • In reality, there is very little information that is a MUST HAVE before we go somewhere with humans. What SKGs do is buy down risk, allowing you to design simpler/cheaper systems. • There are three flavors of SKGs 1. Have to have – Requirements 2. Buys down risk – LM foot pads 3. Mission enhancing – Resources • Four sets of SKGs – Moon, Phobos & Deimos, Mars, NEOs www.nasa.gov/exploration/library/skg.html 2 EM-1 Secondary Payloads 13 CUBESATS SELECTED TO FLY ON INTERIM EM-1 CRYOGENIC PROPULSION • Lunar Flashlight STAGE • Near Earth Asteroid Scout • Bio Sentinel • LunaH-MAP • CuSPP • Lunar IceCube • LunIR • EQUULEUS (JAXA) • OMOTENASHI (JAXA) • ArgoMoon (ESA) • STMD Centennial Challenge Winners 3 3 3 Lunar Flashlight Overview Looking for surface ice deposits and identifying favorable locations for in-situ utilization in lunar south pole cold traps Measurement Approach: • Lasers in 4 different near-IR bands illuminate the lunar surface with a 3° beam (1 km spot). Orbit: • Light reflected off the lunar • Elliptical: 20-9,000 km surface enters the spectrometer to • Orbit Period: 12 hrs distinguish water -

A Manned Flyby Mission to Eros
The Space Congress® Proceedings 1966 (3rd) The Challenge of Space Mar 7th, 8:00 AM A Manned Flyby Mission to Eros Eugene A. Smith Northrop Space Laboratories Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Smith, Eugene A., "A Manned Flyby Mission to Eros" (1966). The Space Congress® Proceedings. 1. https://commons.erau.edu/space-congress-proceedings/proceedings-1966-3rd/session-2/1 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. A MANNED FLYBY MISSION TO EROS Eugene A. Smith Northrop Space Laboratories Hawthorne, California Summary Are there lesser bodies, other than the moon, sufficiently interesting for an early manned Eros (433), the largest of the known close ap mission? proach asteroids, will pass within 0.15 AU of the Earth during its 1975 opposition. This close approach, Are such missions technically and economically occurring near the asteroid's descending node and feasible? perihelion, offers an early opportunity for a relatively low energy manned interplanetary mission. Such a Can such missions complement, rather than com mission could provide data important to the space pete with, the more ambitious Mars and Venus technologies, to the astro sciences, and to the utiliza flights? tion of extraterrestrial resources. Mars and Venus are the primary targets of early manned planetary This paper presents a partial answer to these questions flight, and therefore early manned planetary missions by examining the technical feasibility of a 1975 manned to other objects should support or complement the mission to the close approach asteroid Eros (433).