The Postulates of Neutral Geometry Axiom 1 (The Set Postulate). Every
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: Date
Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: ________________________________________ Date: ______________ Block: ________ Identifying Pairs of Lines and Angles Lines that intersect are coplanar Lines that do not intersect o are parallel (coplanar) OR o are skew (not coplanar) In the figure, name: o intersecting lines:___________ o parallel lines:_______________ o skew lines:________________ o parallel planes:_____________ Example: Think of each segment in the figure as part of a line. Find: Line(s) parallel to CD and containing point A _________ Line(s) skew to and containing point A _________ Line(s) perpendicular to and containing point A _________ Plane(s) parallel to plane EFG and containing point A _________ Parallel and Perpendicular Lines If two lines are in the same plane, then they are either parallel or intersect a point. There exist how many lines through a point not on a line? __________ Only __________ of them is parallel to the line. Parallel Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Perpendicular Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Angles and Transversals Interior angles are on the INSIDE of the two lines Exterior angles are on the OUTSIDE of the two lines Alternate angles are on EITHER SIDE of the transversal Consecutive angles are on the SAME SIDE of the transversal Corresponding angles are in the same position on each of the two lines Alternate interior angles lie on either side of the transversal inside the two lines Alternate exterior angles lie on either side of the transversal outside the two lines Consecutive interior angles lie on the same side of the transversal inside the two lines (same side interior) Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. -

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Theorems and Postulates
Theorems and Postulates JJJG Given AB and a number r between 0 and 180, there Postulate 1-A is exactly one JrayJJG with endpoint A , extending on Protractor Postulate either side of AB , such that the measure of the angle formed is r . ∠A is a right angle if mA∠ is 90. Definition of Right, Acute ∠A is an acute angle if mA∠ is less than 90. and Obtuse Angles ∠A is an obtuse angle if mA∠ is greater than 90 and less than 180. Postulate 1-B If R is in the interior of ∠PQS , then mPQRmRQSmPQS∠ +∠ =∠ . Angle Addition If mP∠+∠=∠QRmRQSmPQS, then R is in the interior of ∠PQS. Vertical angles are congruent. The sum of the measures of the angles in a linear pair is 180˚. The sum of the measures of complementary angles is 90˚. Two points on a line can be paired with real numbers so that, given Postulate 2-A any two points R and S on the line, R corresponds to zero, and S Ruler corresponds to a positive number. Point R could be paired with 0, and S could be paired with 10. R S -2 -1 0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8 9 10 Postulate 2-B If N is between M and P, then MN + NP = MP. Segment Addition Conversely, if MN + NP = MP, then N is between M and P. Theorem 2-A In a right triangle, the sum of the squares of the measures Pythagorean of the legs equals the square of the measure of the Theorem hypotenuse. -
Parallel Lines and Transversals
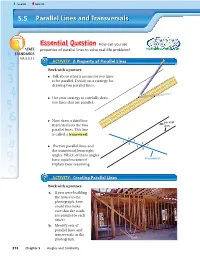
5.5 Parallel Lines and Transversals How can you use STATES properties of parallel lines to solve real-life problems? STANDARDS MA.8.G.2.2 1 ACTIVITY: A Property of Parallel Lines Work with a partner. ● Talk about what it means for two lines 12 1 cm 56789 to be parallel. Decide on a strategy for 1234 drawing two parallel lines. 01 91 8 9 9 9 9 10 11 12 13 10 10 10 10 ● Use your strategy to carefully draw 7 67 two lines that are parallel. 14 15 5 16 17 18 19 20 3421 22 23 2 24 25 26 1 ● Now, draw a third line 27 28 in. parallel that intersects the two 29 30 lines parallel lines. This line is called a transversal. 2 1 3 4 6 ● The two parallel lines and 5 7 8 the transversal form eight angles. Which of these angles have equal measures? transversal Explain your reasoning. 2 ACTIVITY: Creating Parallel Lines Work with a partner. a. If you were building the house in the photograph, how could you make sure that the studs are parallel to each other? b. Identify sets of parallel lines and transversals in the Studs photograph. 212 Chapter 5 Angles and Similarity 3 ACTIVITY: Indirect Measurement Work with a partner. F a. Use the fact that two rays from the Sun are parallel to explain why △ABC and △DEF are similar. b. Explain how to use similar triangles to fi nd the height of the fl agpole. x ft Sun’s ray C Sun’s ray 5 ft AB3 ft DE36 ft 4. -
Triangles and Transversals Triangles
Triangles and Transversals Triangles A three-sided polygon. Symbol → ▵ You name it ▵ ABC. Total Angle Sum of a Triangle The interior angles of a triangle add up to 180 degrees. Symbol = Acute Triangle A triangle that contains only angles that are less than 90 degrees. Obtuse Triangle A triangle with one angle greater than 90 degrees (an obtuse angle). Right Triangle A triangle with one right angle (90 degrees). Vertex The common endpoint of two or more rays or line segments. Complementary Angles Two angles whose measures have a sum of 90 degrees. Supplementary Angles Two angles whose measures have a sum of 180 degrees. Perpendicular Lines Lines that intersect to form a right angle (90 degrees). Symbol = Parallel Lines Lines that never intersect. Arrows are used to indicate lines are parallel. Symbol = || Transversal Lines A line that cuts across two or more (usually parallel) lines. Intersect The point where two lines meet or cross. Vertical Angles Angles opposite one another at the intersection of two lines. Vertical angles have the same angle measurements. Interior Angles An angle inside a shape. Exterior Angles Angles outside of a shape. Alternate Interior Angles The pairs of angles on opposite sides of the transversal but inside the two lines. Alternate Exterior Angles Each pair of these angles are outside the lines, and on opposite sides of the transversal. Corresponding Angles The angles in matching corners. Reflexive Angles An angle whose measure is greater than 180 degrees and less that 360 degrees. Straight Angles An angle that measures exactly 180 degrees. Adjacent Angles Angles with common side and common vertex without overlapping. -

Read Book Advanced Euclidean Geometry Ebook
ADVANCED EUCLIDEAN GEOMETRY PDF, EPUB, EBOOK Roger A. Johnson | 336 pages | 30 Nov 2007 | Dover Publications Inc. | 9780486462370 | English | New York, United States Advanced Euclidean Geometry PDF Book As P approaches nearer to A , r passes through all values from one to zero; as P passes through A , and moves toward B, r becomes zero and then passes through all negative values, becoming —1 at the mid-point of AB. Uh-oh, it looks like your Internet Explorer is out of date. In Elements Angle bisector theorem Exterior angle theorem Euclidean algorithm Euclid's theorem Geometric mean theorem Greek geometric algebra Hinge theorem Inscribed angle theorem Intercept theorem Pons asinorum Pythagorean theorem Thales's theorem Theorem of the gnomon. It might also be so named because of the geometrical figure's resemblance to a steep bridge that only a sure-footed donkey could cross. Calculus Real analysis Complex analysis Differential equations Functional analysis Harmonic analysis. This article needs attention from an expert in mathematics. Facebook Twitter. On any line there is one and only one point at infinity. This may be formulated and proved algebraically:. When we have occasion to deal with a geometric quantity that may be regarded as measurable in either of two directions, it is often convenient to regard measurements in one of these directions as positive, the other as negative. Logical questions thus become completely independent of empirical or psychological questions For example, proposition I. This volume serves as an extension of high school-level studies of geometry and algebra, and He was formerly professor of mathematics education and dean of the School of Education at The City College of the City University of New York, where he spent the previous 40 years. -

On the Standard Lengths of Angle Bisectors and the Angle Bisector Theorem
Global Journal of Advanced Research on Classical and Modern Geometries ISSN: 2284-5569, pp.15-27 ON THE STANDARD LENGTHS OF ANGLE BISECTORS AND THE ANGLE BISECTOR THEOREM G.W INDIKA SHAMEERA AMARASINGHE ABSTRACT. In this paper the author unveils several alternative proofs for the standard lengths of Angle Bisectors and Angle Bisector Theorem in any triangle, along with some new useful derivatives of them. 2010 Mathematical Subject Classification: 97G40 Keywords and phrases: Angle Bisector theorem, Parallel lines, Pythagoras Theorem, Similar triangles. 1. INTRODUCTION In this paper the author introduces alternative proofs for the standard length of An- gle Bisectors and the Angle Bisector Theorem in classical Euclidean Plane Geometry, on a concise elementary format while promoting the significance of them by acquainting some prominent generalized side length ratios within any two distinct triangles existed with some certain correlations of their corresponding angles, as new lemmas. Within this paper 8 new alternative proofs are exposed by the author on the angle bisection, 3 new proofs each for the lengths of the Angle Bisectors by various perspectives with also 5 new proofs for the Angle Bisector Theorem. 1.1. The Standard Length of the Angle Bisector Date: 1 February 2012 . 15 G.W Indika Shameera Amarasinghe The length of the angle bisector of a standard triangle such as AD in figure 1.1 is AD2 = AB · AC − BD · DC, or AD2 = bc 1 − (a2/(b + c)2) according to the standard notation of a triangle as it was initially proved by an extension of the angle bisector up to the circumcircle of the triangle. -

Understand the Principles and Properties of Axiomatic (Synthetic
Michael Bonomi Understand the principles and properties of axiomatic (synthetic) geometries (0016) Euclidean Geometry: To understand this part of the CST I decided to start off with the geometry we know the most and that is Euclidean: − Euclidean geometry is a geometry that is based on axioms and postulates − Axioms are accepted assumptions without proofs − In Euclidean geometry there are 5 axioms which the rest of geometry is based on − Everybody had no problems with them except for the 5 axiom the parallel postulate − This axiom was that there is only one unique line through a point that is parallel to another line − Most of the geometry can be proven without the parallel postulate − If you do not assume this postulate, then you can only prove that the angle measurements of right triangle are ≤ 180° Hyperbolic Geometry: − We will look at the Poincare model − This model consists of points on the interior of a circle with a radius of one − The lines consist of arcs and intersect our circle at 90° − Angles are defined by angles between the tangent lines drawn between the curves at the point of intersection − If two lines do not intersect within the circle, then they are parallel − Two points on a line in hyperbolic geometry is a line segment − The angle measure of a triangle in hyperbolic geometry < 180° Projective Geometry: − This is the geometry that deals with projecting images from one plane to another this can be like projecting a shadow − This picture shows the basics of Projective geometry − The geometry does not preserve length -

Parallel Lines Cut by a Transversal
Parallel Lines Cut by a Transversal I. UNIT OVERVIEW & PURPOSE: The goal of this unit is for students to understand the angle theorems related to parallel lines. This is important not only for the mathematics course, but also in connection to the real world as parallel lines are used in designing buildings, airport runways, roads, railroad tracks, bridges, and so much more. Students will work cooperatively in groups to apply the angle theorems to prove lines parallel, to practice geometric proof and discover the connections to other topics including relationships with triangles and geometric constructions. II. UNIT AUTHOR: Darlene Walstrum Patrick Henry High School Roanoke City Public Schools III. COURSE: Mathematical Modeling: Capstone Course IV. CONTENT STRAND: Geometry V. OBJECTIVES: 1. Using prior knowledge of the properties of parallel lines, students will identify and use angles formed by two parallel lines and a transversal. These will include alternate interior angles, alternate exterior angles, vertical angles, corresponding angles, same side interior angles, same side exterior angles, and linear pairs. 2. Using the properties of these angles, students will determine whether two lines are parallel. 3. Students will verify parallelism using both algebraic and coordinate methods. 4. Students will practice geometric proof. 5. Students will use constructions to model knowledge of parallel lines cut by a transversal. These will include the following constructions: parallel lines, perpendicular bisector, and equilateral triangle. 6. Students will work cooperatively in groups of 2 or 3. VI. MATHEMATICS PERFORMANCE EXPECTATION(s): MPE.32 The student will use the relationships between angles formed by two lines cut by a transversal to a) determine whether two lines are parallel; b) verify the parallelism, using algebraic and coordinate methods as well as deductive proofs; and c) solve real-world problems involving angles formed when parallel lines are cut by a transversal. -

The Stoics and the Practical: a Roman Reply to Aristotle
DePaul University Via Sapientiae College of Liberal Arts & Social Sciences Theses and Dissertations College of Liberal Arts and Social Sciences 8-2013 The Stoics and the practical: a Roman reply to Aristotle Robin Weiss DePaul University, [email protected] Follow this and additional works at: https://via.library.depaul.edu/etd Recommended Citation Weiss, Robin, "The Stoics and the practical: a Roman reply to Aristotle" (2013). College of Liberal Arts & Social Sciences Theses and Dissertations. 143. https://via.library.depaul.edu/etd/143 This Thesis is brought to you for free and open access by the College of Liberal Arts and Social Sciences at Via Sapientiae. It has been accepted for inclusion in College of Liberal Arts & Social Sciences Theses and Dissertations by an authorized administrator of Via Sapientiae. For more information, please contact [email protected]. THE STOICS AND THE PRACTICAL: A ROMAN REPLY TO ARISTOTLE A Thesis Presented in Partial Fulfillment of the Degree of Doctor of Philosophy August, 2013 BY Robin Weiss Department of Philosophy College of Liberal Arts and Social Sciences DePaul University Chicago, IL - TABLE OF CONTENTS - Introduction……………………..............................................................................................................p.i Chapter One: Practical Knowledge and its Others Technê and Natural Philosophy…………………………….....……..……………………………….....p. 1 Virtue and technical expertise conflated – subsequently distinguished in Plato – ethical knowledge contrasted with that of nature in -

Geometry: Neutral MATH 3120, Spring 2016 Many Theorems of Geometry Are True Regardless of Which Parallel Postulate Is Used
Geometry: Neutral MATH 3120, Spring 2016 Many theorems of geometry are true regardless of which parallel postulate is used. A neutral geom- etry is one in which no parallel postulate exists, and the theorems of a netural geometry are true for Euclidean and (most) non-Euclidean geomteries. Spherical geometry is a special case of Non-Euclidean geometries where the great circles on the sphere are lines. This leads to spherical trigonometry where triangles have angle measure sums greater than 180◦. While this is a non-Euclidean geometry, spherical geometry develops along a separate path where the axioms and theorems of neutral geometry do not typically apply. The axioms and theorems of netural geometry apply to Euclidean and hyperbolic geometries. The theorems below can be proven using the SMSG axioms 1 through 15. In the SMSG axiom list, Axiom 16 is the Euclidean parallel postulate. A neutral geometry assumes only the first 15 axioms of the SMSG set. Notes on notation: The SMSG axioms refer to the length or measure of line segments and the measure of angles. Thus, we will use the notation AB to describe a line segment and AB to denote its length −−! −! or measure. We refer to the angle formed by AB and AC as \BAC (with vertex A) and denote its measure as m\BAC. 1 Lines and Angles Definitions: Congruence • Segments and Angles. Two segments (or angles) are congruent if and only if their measures are equal. • Polygons. Two polygons are congruent if and only if there exists a one-to-one correspondence between their vertices such that all their corresponding sides (line sgements) and all their corre- sponding angles are congruent. -

Advanced Euclidean Geometry
Advanced Euclidean Geometry Paul Yiu Summer 2016 Department of Mathematics Florida Atlantic University July 18, 2016 Summer 2016 Contents 1 Some Basic Theorems 101 1.1 The Pythagorean Theorem . ............................ 101 1.2 Constructions of geometric mean . ........................ 104 1.3 The golden ratio . .......................... 106 1.3.1 The regular pentagon . ............................ 106 1.4 Basic construction principles ............................ 108 1.4.1 Perpendicular bisector locus . ....................... 108 1.4.2 Angle bisector locus . ............................ 109 1.4.3 Tangency of circles . ......................... 110 1.4.4 Construction of tangents of a circle . ............... 110 1.5 The intersecting chords theorem ........................... 112 1.6 Ptolemy’s theorem . ................................. 114 2 The laws of sines and cosines 115 2.1 The law of sines . ................................ 115 2.2 The orthocenter ................................... 116 2.3 The law of cosines .................................. 117 2.4 The centroid ..................................... 120 2.5 The angle bisector theorem . ............................ 121 2.5.1 The lengths of the bisectors . ........................ 121 2.6 The circle of Apollonius . ............................ 123 3 The tritangent circles 125 3.1 The incircle ..................................... 125 3.2 Euler’s formula . ................................ 128 3.3 Steiner’s porism ................................... 129 3.4 The excircles ....................................