Rehabilitative Adult Tricycle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

32 Minis Newsletter Bicycles
Academy Art Museum academyartmuseum.org MINIS AT HOME volume 1, issue 32 Greetings kids, parents, grandparents, guardians, friends and neighbors! Welcome to issue 32 of Minis at Home newsletter. This is our last newsletter of the school year. We hope you have enjoyed reading the newsletters as much as we have enjoyed preparing them for you. Remember that exploring the natural world, working on projects together with your family, and making time to read are all important activities to keep mind and body healthy. This week’s theme = Bicycles It's that time of year when we are heading outside more and more as the weather becomes warmer and our days become longer. Some of us might enjoy a walk, some of us might ride horses, and some of us may play soccer, but many of us like to ride bikes and scooters best. Bicycle comes from “bi," which means two, and “cycle," which means circle. Wheels, of course, are shaped like circles. Bicycles have 2 wheels, 2 peddles, a frame and handlebars. There is a chain that is connected to cogs. When you push the pedals with your legs, this turns the chain, which then turns the back wheel. You steer the front wheel with the handlebars. The short name for “bicycle” is “bike.” It takes a little practice to balance on a bike. Children who are just learning to balance on a bike may use training wheels that keep the bike from falling over. Very young children can ride a tricycle (or “trike”), which has three wheels and can’t tip at all. -

Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516
Copake Auction Inc. PO BOX H - 266 Route 7A Copake, NY 12516 Phone: 518-329-1142 December 1, 2012 Pedaling History Bicycle Museum Auction 12/1/2012 LOT # LOT # 1 19th c. Pierce Poster Framed 6 Royal Doulton Pitcher and Tumbler 19th c. Pierce Poster Framed. Site, 81" x 41". English Doulton Lambeth Pitcher 161, and "Niagara Lith. Co. Buffalo, NY 1898". Superb Royal-Doulton tumbler 1957. Estimate: 75.00 - condition, probably the best known example. 125.00 Estimate: 3,000.00 - 5,000.00 7 League Shaft Drive Chainless Bicycle 2 46" Springfield Roadster High Wheel Safety Bicycle C. 1895 League, first commercial chainless, C. 1889 46" Springfield Roadster high wheel rideable, very rare, replaced headbadge, grips safety. Rare, serial #2054, restored, rideable. and spokes. Estimate: 3,200.00 - 3,700.00 Estimate: 4,500.00 - 5,000.00 8 Wood Brothers Boneshaker Bicycle 3 50" Victor High Wheel Ordinary Bicycle C. 1869 Wood Brothers boneshaker, 596 C. 1888 50" Victor "Junior" high wheel, serial Broadway, NYC, acorn pedals, good rideable, #119, restored, rideable. Estimate: 1,600.00 - 37" x 31" diameter wheels. Estimate: 3,000.00 - 1,800.00 4,000.00 4 46" Gormully & Jeffrey High Wheel Ordinary Bicycle 9 Elliott Hickory Hard Tire Safety Bicycle C. 1886 46" Gormully & Jeffrey High Wheel C. 1891 Elliott Hickory model B. Restored and "Challenge", older restoration, incorrect step. rideable, 32" x 26" diameter wheels. Estimate: Estimate: 1,700.00 - 1,900.00 2,800.00 - 3,300.00 4a Gormully & Jeffery High Wheel Safety Bicycle 10 Columbia High Wheel Ordinary Bicycle C. -

Eek Eek for 66 Years for 66 Years Wednesday, Aug.7,2019 Wednesday, Aug.7,2019 Free Free TAKE ONE! Page 2 Wed., Aug
acationacation Wednesday,Wednesday, Aug.Aug. 7,7, 20192019 eekeek FreeFree VV TAKE WW ONE! Your summer guide for 66 years PAID ECRWSS U.S. Postage Permit No. 13 PRSRT STD PRSRT VILAS COUNTY NEWS-REVIEW and THE THREE LAKES NEWS Page 2 Wed., Aug. 7, 2019 VACATION WEEK PINK COYOTE INDIAN ART JEWELRY • TURQUOISE • STERLING SILVER JEWELRY • NATIVE AMERICAN ARTWORK • RUGS • POTTERY • KACHINAS 212 Wall St., adjacent to Vilas Cinema, downtown Eagle River 715-479-9831 OOPPEENN DDAAIILLYY 847 GOLF COURSE LOOP RD. Located off Hwy. 32, 4 miles east of downtown Three Lakes Clubhouse now open — with full bar and outdoor patio. Visit us soon to enjoy all the improvements! Keeping a Time-Honored Tradition Since 1945 BigStoneGolfCourse.com 715-546-2100 It’s More T han a Jewelry Store Eagle Gold Collection original designs by Michael Stephan 40 years’ experience as a Diamonds, Gemstones, Gold, Silver, certified master watchmaker Opals, Turquoise, Amber & more! & in jewelry repair & design New & Refurbished Antique Jewelry WE ARE BUYING YOUR OLD GOLD Downtown Eagle River, Wis. (715) 479-4520 Chef Rene and the Ayvazzadeh family welcome friends, both old & new, to come and enjoy the Tremblay’s Sweet Shop, Inc. newly renovated lakeside dining room at the Inn! OPEN DAILY 9 A.M. TO 9 P.M. FRIDAY FISH FRY – All-You-Can-Eat Alaskan Pollock $13.95 Broiled, Fried or a Combination of the 2 Choice of Potato Pancakes, Fries, German or American Potato Salad *Mail orders HOMEMADE CANDIES with Coleslaw, Tartar and Rye Bread. shipped promptly. • Fudge • Turtles • Clusters • Cashew Brittle • Peanut Brittle Hours: Wed.-Thurs 5-9 p.m.; Fri.-Sat. -

Newsletter December 2009 Final
cyclefitcentre.com/pedal pushers December, 2009 ph: 83388911 fx:83388922 newsletter Bloody hell, 10 months since a newsletter! Yeah, it’s been a while and plenty has happened in that time but we’ve been so busy there was no time to write this. What ever is going on in the wider world, the GFC has had a positive affect on us. Consider this a condensed version of the last 10 months. Just the highlights! Jayson Austin breaks the Masters Hour Record. Old news for some of you, but Jays got over last years disappointment in fine style by breaking the existing record by 2.6 kms! He promises to have a real go next time which might just be next year. Note the interesting placement of his SRM computer head Dura Ace Di2 As someone who has owned both Mavic Zap and Mavic Mektronic, I was interested to see Shimano’s iteration of electric shifting and give it a workout. By now you’ve read all about it but from my point of view the most impressive thing is the front derailleur shifting. When shifting up or down with the front derailleur on any bike that I’ve ridden, the rider needs to back off their pedaling effort for a pedal stroke or part pedal stroke to allow the chain to move up to the big ring or down from the big ring. Not with Di2. Off the seat, giving it everything you’ve got, the Di2 front derailleur will just shift without drama………….. and quickly. Coach Alex letti ng Jays know that he’s only 2.5kms up on the THE group set at the moment. -

Cargo Bikes As a Growth Area for Bicycle Vs. Auto Trips: Exploring the Potential for Mode Substitution Behavior
Transportation Research Part F 43 (2016) 48–55 Contents lists available at ScienceDirect Transportation Research Part F journal homepage: www.elsevier.com/locate/trf Cargo bikes as a growth area for bicycle vs. auto trips: Exploring the potential for mode substitution behavior William Riggs Department of City and Regional Planning, College of Architecture and Environmental Design, California Polytechnic State University, 1 Grand Ave., San Luis Obispo, CA 93405, United States article info abstract Article history: Cargo bikes are increasing in availability in the United States. While a large body of Received 26 February 2015 research continues to investigate traditional bike transportation, cargo bikes offer the Received in revised form 15 August 2016 potential to capture trips for those that might otherwise be made by car. Data from a sur- Accepted 18 September 2016 vey of cargo bike users queried use and travel dynamics with the hypothesis that cargo and Available online 6 October 2016 e-cargo bike ownership has the potential to contribute to mode substitution behavior. From a descriptive standpoint, 68.9% of those surveyed changed their travel behavior after Keywords: purchasing a cargo bike and the number of auto trips appeared to decline by 1–2 trips per Cargo bikes day, half of the auto travel prior to ownership. Two key reasons cited for this change Bicycles Linked trips include the ability to get around with children and more gear. Regression models that Mode choice underscore this trend toward increased active transport confirm this. Based on these results, further research could include focus on overcoming weather-related/elemental barriers, which continue to be an obstacle to every day cycling, and further investigation into families modeling healthy behaviors to children with cargo bikes. -
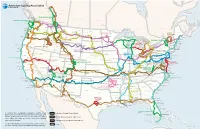
In Creating the Ever-Growing Adventure Cycling Route Network
Route Network Jasper Edmonton BRITISH COLUMBIA Jasper NP ALBERTA Banff NP Banff GREAT PARKS NORTH Calgary Vancouver 741 mi Blaine SASKATCHEWAN North Cascades NP MANITOBA WASHINGTON PARKS Anacortes Sedro Woolley 866 mi Fernie Waterton Lakes Olympic NP NP Roosville Seattle Twisp Winnipeg Mt Rainier NEW Elma Sandpoint Cut Bank NP Whitefish BRUNSWICK Astoria Spokane QUEBEC WASHINGTON Glacier Great ONTARIO NP Voyageurs Saint John Seaside Falls Wolf Point NP Thunder Bay Portland Yakima Minot Fort Peck Isle Royale Missoula Williston NOVA SCOTIA Otis Circle NORTHERN TIER NP GREEN MAINE Salem Hood Clarkston Helena NORTH DAKOTA 4,293 mi MOUNTAINS Montreal Bar Harbor River MONTANA Glendive Dickinson 380 mi Kooskia Butte Walker Yarmouth Florence Bismarck Fargo Sault Ste Marie Sisters Polaris Three Forks Theodore NORTH LAKES Acadia NP McCall Roosevelt Eugene Duluth 1,160 mi Burlington NH Bend NP Conover VT Brunswick Salmon Bozeman Mackinaw DETROIT OREGON Billings ADIRONDACK PARK North Dalbo Escanaba City ALTERNATE 395 mi Portland Stanley West Yellowstone 505 mi Haverhill Devils Tower Owen Sound Crater Lake SOUTH DAKOTA Osceola LAKE ERIE Ticonderoga Portsmouth Ashland Ketchum NM Crescent City NP Minneapolis CONNECTOR Murphy Boise Yellowstone Rapid Stillwater Traverse City Toronto Grand Teton 507 mi Orchards Boston IDAHO HOT SPRINGS NP City Pierre NEW MA Redwood NP NP Gillette Midland WISCONSIN Albany RI Mt Shasta 518 mi WYOMING Wolf Marine Ithaca YORK Arcata Jackson MINNESOTA Manitowoc Ludington City Ft. Erie Buffalo IDAHO Craters Lake Windsor Locks -

Pacific Cycles 2 Rider
Pacific Cycles 2-Rider http://www.pacific-cycles.com/ The fabulous Swiss-made ZEM is the only two-seat quadracycle with an aluminium frame and four-wheel independent suspension – right? Not any more! Built by Pacific Cycles in Taiwan, the 2-Rider weighs-in at a respectable 60 kg. (132 pounds) – and that figure includes the canopy top and the forward-mounted kids seats! I couldn’t find a Canadian price, but Bikemania.biz in Butler, NJ sells the 2-Rider for $3700.00 U.S. Front deck • Ackermann Steering • Shimano Alivio 8-speed grip shift • Tektro 836AL V-brakes on all four wheels Rear luggage tray Pacific Cycles products are distributed in Canada by Belize Bicycle Inc. Belize sells to retailers all over Canada, so it may be possible to order a 2-Rider from your local bike shop. http://www.belizebike.com/english/retaillist.html While I was looking for information about Pacific Cycles, I found an interesting profile of the company. They build 375 bikes per month in a 10,000sqm factory in Taoyuan, Taiwan. The company has 110 full-time Gordon Koppang July 2008 employees – 15 designers among them. Pacific Cycles reports annual sales of 2.2 million. The company invests about 7 percent of revenue in R&D. I can’t help thinking of the clash between British and Japanese motorcycle manufacturers in the 1960s. The sad fact is, Triumph, Norton, BSA, etc. all knew how to build better motorcycles; they just refused to do it. The British manufacturers refused to spend money on R&D and – as long as the public was willing to buy poorly built bikes based on outdated designs – they got away with it. -

Mountain Bike Accessories for Trail Work
Part 1 of 3 United States Department of Agriculture MountainMountain BikeBike Forest Service Technology & Development AccessoriesAccessories forfor Program 2300 Recreation April 1998 TTrailrail WWorkork 9823-2812-MTDC Brian Vachowski, Project Leader 7E72A47–Accessories for Transporting Trail Maintenance Tools 1 Part 1 of 3 Contents Acknowledgments Part 1of 3 any people throughout the country who are not listed Introduction ___________________________ 3 here helped on this project with their comments and MM suggestions. I am especially grateful to the following The Situation at Seward _________________ 4 for their indepth contributions: Benefits of Bicycles ____________________ 5 Suzanne Hanlon, Adventure Cycling Association Not for Everyone _______________________ 6 Stephen Hmurciak, Seward Ranger District Panniers ______________________________ 7 Irene Lindquist, Seward Ranger District Chain Saw Carrier ______________________ 8 Kurt Loheit, International Mountain Bicycling Assn. Part 2 of 3 John Morris, Burley Design Cooperative Trailers ______________________________ 10 Sylvia Russell, Recreational Equipment, Inc. B.O.B. Yak Trailer _________________________ 10 B.O.B. Coz Trailer _________________________ 11 Wheele Pac Dog Trailer _____________________ 11 Keith Wolferman, Missoula Aerial Fire Depot Burley Design Cooperative’s Prototype _________ 11 Part 3 of 3 MTDC Staff: Bob Beckley, Windy Hayden, Bob Hensler, Product Sources and Organizations ______ 14 Gary Hoshide, Bert Lindler, and Sara Lustgraaf. About the Author______________________ 14 Appendix A—Job Hazard Analyses for Riding Mountain Bicycles and for Trailers _____________ 15 Appendix B—Kurt Loheit’s Tool Holder (Fits B.O.B. Yak Trailer) _______________________ 17 The Forest Service, United States Department of Agriculture, has developed this information for the guidance of its employees, its contractors, and its cooperating Federal and State agencies, and is not responsible for the interpretation or use of this information by anyone except its own employees. -

Owner's Manual
IBD-Mountain EN 07-01-19 m0520 © Batch Bicycles Ltd 2019 PLEASE VISIT YOUR AUTHORIZED BATCH RETAILER FOR SERVICE AND QUESTIONS. Batch Bicycles 8889 Gander Creek Dr. Dayton, OH 45342 833.789.8899 batchbicycles.com OWNER’S MANUAL for Mountain Bikes BATCH Limited Warranty We’ve Got You Covered damage, failure, or loss that is caused by improper Owner’s Manual Index Batch Bicycles comes with our industry’s best war- assembly, maintenance, adjustment, storage, or ranty program – Batch Bicycles Service Program. use of the product. This limited warranty does not Safety and Warnings ...........................................................................................2-5 Once your Batch Bicycle is registered, Batch extend to future performance. Bicycles provides each original retail purchaser of a Batch Bicycle a warranty against defects in materi- This Limited Warranty will be void if the prod- Assembly and Parts ..............................................................................................6-18 als and workmanship, as stated below: uct is ever: • Used in any competitive sport Brake System .............................................................................................................. 19-22 General: • Used for stunt riding, jumping, aerobatics or Warranty Part or model specifi cations are subject to change similar activity without notice. • Modifi ed in any way Shift System .................................................................................................................. 23-29 This Limited Warranty -

Willy WATTS 14
VOLUME 4 BO. 3 <,JARTERLY JULY 1977 { Official Organ UNICYCLING SOCIETY OF AMERICA. Inc. c 1977 ~11 Rts Rea. Yearly Membership S5 Incl~des NeVl!lletter (4) ID Card - See Blank Pg.18 OFFICERS FELI.OW UNICYCLISTS: Due to o·trcwastances beyond our control (namely a big pile of dirt and construction lfOrk) the Southland Mall in Marion Pres. Paul Fox will not be available for our National Meet races on A.ug. 20. lttempts v.Pres. R.Tschudin to secure an alternate suita'Qle location nearby have failed. We are Sec. T. ni.ck Haines therefore planning to anit the Saturday morning races and utilize that FOUNDER M:El-!BE&S part of the day this year ror a general convention type get-together where clubs and inru.viduais can meet each other, swap ideas, and display Bernard Crandall their talents and cycles. · We still plan to hold the preliminary elimi Paul & Nancy Fox nations for the group an9- trick riding later in the day at the Catholic Peter Hangach High School parking lot·. We also have the use of the Coliseum again for Patricia Herron the Sunday afternoon final~. A pan.de is still in question and if we do Bill Jenack hold one it will be JllUCh s.horter than last year. It, is hoped that every Gordon Kruse member will make a ~ec~al-effort to attend the annual business meeting Steve McPeak Sunday rooming at th(' Hpltday Inn. We have a number of V9ry important Fr. Jas. J. Moran items on the agenda (see pag~ 14 for further infomation). -
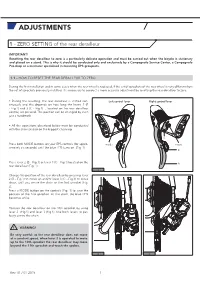
Adjustments and Settings Electronic Groupsets
ADJUSTMENTS 1 - ZERO SETTING of the rear derailleur IMPORTANT! Resetting the rear derailleur to zero is a particularly delicate operation and must be carried out when the bicycle is stationary and placed on a stand. This is why it should be conducted only and exclusively by a Campagnolo Service Center, a Campagnolo Pro-shop or a mechanic specialised in mounting EPS groupsets. 1.1 - HOW TO RESET THE REAR DERAILLEUR TO ZERO During the first installation and in some cases when the rear wheel is replaced, if the set of sprockets of the new wheel is very different from the set of sprockets previously installed, it is necessary to conduct a more accurate adjustment by resetting the rear derailleur to zero. • During the resetting, the rear derailleur is shifted con- Left control lever Right control lever tinuously and this depends on how long the levers 2 (B - Fig.1) and 3 (C - Fig.1) , located on the rear derailleur control, are pressed. The position can be changed by even just a hundredth. • All the operations described below must be conducted with the chain placed on the biggest chainring. C Press both MODE buttons on your EPS controls (for appro- mode mode ximately six seconds) until the blue LED turns on (Fig. 1). B Press lever 2 (B - Fig.1) or lever 3 (C - Fig.1) located on the A rear derailleur (Fig. 1). 1 Change the position of the rear derailleur by pressing lever 2 (B - Fig.1) to move up and/or lever 3 (C - Fig.1) to move down, until you centre the chain on the 2nd sprocket (Fig. -

Cycling: Supporting Economic Growth in Canada
Cycling: Supporting Economic Growth in Canada Prepared by Vélo Canada Bikes for the House of Commons Standing Committee on Finance pre-budget consultations Submitted August 3rd, 2018 1 Investing in cycling and active transportation: Supporting economic growth in Canada Recommendations for the Government of Canada In collaboration with provincial and territorial governments, the Federation of Canadian Municipalities, the Assembly of First Nations and additional stakeholders, implement the following recommendations: Recommendation #1: Develop a funding stream designed to rapidly increase the development and improvement of active transportation infrastructure and related traffic calming in all Canadian municipalities and in rural areas. Recommendation #2: Establish a national-level forum to consult, share, and develop a plan for moving more people and goods by bicycle in a wide variety of Canadian settings including urban, rural and remote communities. Recommendation #3: Direct Statistics Canada to collect data that will ensure the adequate and appropriate monitoring and reporting of the prevalence, potential and safety of cycling in Canadian municipalities. Use this data to set achievable evidence-based five- and ten-year transportation mode share targets for cycling. 2 Investment in bicycling represents a vastly underexploited opportunity for economic growth in Canada. If more Canadians were able to safely use a bicycle for daily transportation, there would be significant economic benefits including: a boost to economic productivity from a healthier and more productive workforce; improved mobility and personal savings for Canadians; disadvantaged groups could more easily gain skills and access employment opportunities and there would be an increase in business and tourism revenues. Increased cycling would also help to counter the negative economic costs that motorized vehicles impose on society in the form of congestion; road casualties; physical inactivity and poor health; pollution; and the political and environmental costs of maintaining fossil fuel supplies.