Offshore Wind Access 2019
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Accelerated Reader Book List Report by Reading Level
Accelerated Reader Book List Report by Reading Level Test Book Reading Point Number Title Author Level Value -------------------------------------------------------------------------- 27212EN The Lion and the Mouse Beverley Randell 1.0 0.5 330EN Nate the Great Marjorie Sharmat 1.1 1.0 6648EN Sheep in a Jeep Nancy Shaw 1.1 0.5 9338EN Shine, Sun! Carol Greene 1.2 0.5 345EN Sunny-Side Up Patricia Reilly Gi 1.2 1.0 6059EN Clifford the Big Red Dog Norman Bridwell 1.3 0.5 9454EN Farm Noises Jane Miller 1.3 0.5 9314EN Hi, Clouds Carol Greene 1.3 0.5 9318EN Ice Is...Whee! Carol Greene 1.3 0.5 27205EN Mrs. Spider's Beautiful Web Beverley Randell 1.3 0.5 9464EN My Friends Taro Gomi 1.3 0.5 678EN Nate the Great and the Musical N Marjorie Sharmat 1.3 1.0 9467EN Watch Where You Go Sally Noll 1.3 0.5 9306EN Bugs! Patricia McKissack 1.4 0.5 6110EN Curious George and the Pizza Margret Rey 1.4 0.5 6116EN Frog and Toad Are Friends Arnold Lobel 1.4 0.5 9312EN Go-With Words Bonnie Dobkin 1.4 0.5 430EN Nate the Great and the Boring Be Marjorie Sharmat 1.4 1.0 6080EN Old Black Fly Jim Aylesworth 1.4 0.5 9042EN One Fish, Two Fish, Red Fish, Bl Dr. Seuss 1.4 0.5 6136EN Possum Come a-Knockin' Nancy VanLaan 1.4 0.5 6137EN Red Leaf, Yellow Leaf Lois Ehlert 1.4 0.5 9340EN Snow Joe Carol Greene 1.4 0.5 9342EN Spiders and Webs Carolyn Lunn 1.4 0.5 9564EN Best Friends Wear Pink Tutus Sheri Brownrigg 1.5 0.5 9305EN Bonk! Goes the Ball Philippa Stevens 1.5 0.5 408EN Cookies and Crutches Judy Delton 1.5 1.0 9310EN Eat Your Peas, Louise! Pegeen Snow 1.5 0.5 6114EN Fievel's Big Showdown Gail Herman 1.5 0.5 6119EN Henry and Mudge and the Happy Ca Cynthia Rylant 1.5 0.5 9477EN Henry and Mudge and the Wild Win Cynthia Rylant 1.5 0.5 9023EN Hop on Pop Dr. -
Rhyming Dictionary
Merriam-Webster's Rhyming Dictionary Merriam-Webster, Incorporated Springfield, Massachusetts A GENUINE MERRIAM-WEBSTER The name Webster alone is no guarantee of excellence. It is used by a number of publishers and may serve mainly to mislead an unwary buyer. Merriam-Webster™ is the name you should look for when you consider the purchase of dictionaries or other fine reference books. It carries the reputation of a company that has been publishing since 1831 and is your assurance of quality and authority. Copyright © 2002 by Merriam-Webster, Incorporated Library of Congress Cataloging-in-Publication Data Merriam-Webster's rhyming dictionary, p. cm. ISBN 0-87779-632-7 1. English language-Rhyme-Dictionaries. I. Title: Rhyming dictionary. II. Merriam-Webster, Inc. PE1519 .M47 2002 423'.l-dc21 2001052192 All rights reserved. No part of this book covered by the copyrights hereon may be reproduced or copied in any form or by any means—graphic, electronic, or mechanical, including photocopying, taping, or information storage and retrieval systems—without written permission of the publisher. Printed and bound in the United States of America 234RRD/H05040302 Explanatory Notes MERRIAM-WEBSTER's RHYMING DICTIONARY is a listing of words grouped according to the way they rhyme. The words are drawn from Merriam- Webster's Collegiate Dictionary. Though many uncommon words can be found here, many highly technical or obscure words have been omitted, as have words whose only meanings are vulgar or offensive. Rhyming sound Words in this book are gathered into entries on the basis of their rhyming sound. The rhyming sound is the last part of the word, from the vowel sound in the last stressed syllable to the end of the word. -
ANALYSIS of WATER MASSES DISTRIBUTION and CIRCULATION in the WHITE SEA, RUSSIA. by LAURENT LATCHE a Thesis Submitted to the Univ
University of Plymouth PEARL https://pearl.plymouth.ac.uk 04 University of Plymouth Research Theses 01 Research Theses Main Collection 2004 Analysis of water masses distribution and circulation in the White Sea, Russia Latche, Laurent http://hdl.handle.net/10026.1/635 University of Plymouth All content in PEARL is protected by copyright law. Author manuscripts are made available in accordance with publisher policies. Please cite only the published version using the details provided on the item record or document. In the absence of an open licence (e.g. Creative Commons), permissions for further reuse of content should be sought from the publisher or author. ANALYSIS OF WATER MASSES DISTRIBUTION AND CIRCULATION IN THE WHITE SEA, RUSSIA. by LAURENT LATCHE A thesis submitted to the University of Plymouth In partial fulfilment for the degree of DOCTOR OF PHILOSOPHY School of Earth, Ocean and Environmental Sciences Faculty of Science March 2004 ANALYSIS OF WATER MASSES DISTRIBUTION AND CIRCULATION IN THE WHITE SEA, RUSSIA. by Laurent Latche ABSTRACT The White Sea is a semi-enclosed sea, which consists of several bays and estuaries connected to the open ocean through the narrow and shallow Gorlo Strait. Several studies have been carried out in the region during the last decade in order to investigate the potential threat of anthropogenic pollutants. However, the temporal and spatial resolution of such experiments has been inadequate to resolve issues such as the dispersion and propagation of environmentally hazardous substances. The present investigation uses in-situ measurements of temperature and salinity gathered at high spatio-temporal resolution for the first time, as part of the FNTAS project "Mesoscale physical and biogeochemical processes in coastal waters of the Russian Arctic" and of a number of Russian national and EU research projects. -
Ship-Breaking.Com 2012 Bulletins of Information and Analysis on Ship Demolition, # 27 to 30 from January 1St to December 31St 2012
Ship-breaking.com 2012 Bulletins of information and analysis on ship demolition, # 27 to 30 From January 1st to December 31st 2012 Robin des Bois 2013 Ship-breaking.com Bulletins of information and analysis on ship demolition 2012 Content # 27 from January 1st to April 15th …..……………………….………………….…. 3 (Demolition on the field (continued); The European Union surrenders; The Senegal project ; Letters to the Editor ; A Tsunami of Scrapping in Asia; The END – Pacific Princess, the Love Boat is not entertaining anymore) # 28 from April 16th to July 15th ……..…………………..……………….……..… 77 (Ocean Producer, a fast ship leaves for the scrap yard ; The Tellier leaves with honor; Matterhorn, from Brest to Bordeaux ; Letters to the Editor ; The scrapping of a Portuguese navy ship ; The India – Bangladesh pendulum The END – Ocean Shearer, end of the cruise for the sheep) # 29 from July 16th to October 14th ....……………………..……………….……… 133 (After theExxon Valdez, the Hebei Spirit ; The damaged ship conundrum; Farewell to container ships ; Lepse ; Letters to the Editor ; No summer break ; The END – the explosion of Prem Divya) # 30 from October 15th to December 31st ….………………..…………….……… 197 (Already broken up, but heading for demolition ; Demolition in America; Falsterborev, a light goes out ; Ships without place of refuge; Demolition on the field (continued) ; Hong Kong Convention; The final 2012 sprint; 2012, a record year; The END – Charlesville, from Belgian Congo to Lithuania) Global Statement 2012 ……………………… …………………..…………….……… 266 Bulletin of information and analysis May 7, 2012 on ship demolition # 27 from January 1 to April 15, 2012 Ship-breaking.com An 83 year old veteran leaves for ship-breaking. The Great Lakes bulker Maumee left for demolition at the Canadian ship-breaking yard at Port Colborne (see p 61). -

-
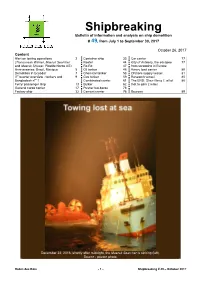
Shipbreaking # 49 – October 2017 Alert on Towing Operations
Shipbreaking Bulletin of information and analysis on ship demolition # 49, from July 1 to September 30, 2017 October 26, 2017 Content Alert on towing operations 2 Container ship 33 Car carrier 77 (Transocean Winner, Maersk Searcher Reefer 44 City of Antwerp, the escapee 77 and Maersk Shipper, Pipelife Norge AS) Ro Ro 47 from scrapping in Europe Anniversaries: Brazil, Mexiqco 5 Oil tanker 48 Heavy load carrier 80 Demolition in Ecuador 7 Chemical tanker 58 Ofshore supply vessel 81 3rd quarter overview : tankers and 9 Gas tanker 59 Research vessel 85 Bangladesh nos 1 Combinated carrier 61 The END: Shen Neng 1, all of 86 Ferry/ passenger ship 13 Bulker 62 that to gain 2 miles General cargo carrier 17 Pusher tug-barge 76 Factory ship 32 Cement carrier 76 Sources 89 December 22, 2016, shortly after midnight, the Maersk Searcher is sinking (left). Source : private photo. Robin des Bois - 1 - Shipbreaking # 49 – October 2017 Alert on towing operations In quick succession, Northern European countries sent floating equipment, towed cargoes, and decommissioned vessels to the Mediterranean. They did not reach their destination or spread pollution and other harmful substances along the way. 1- Transocean Winner Transocean Winner, August 2016. © Mark Macleod © Robin des Bois The Transocean Winner is a semi-submersible platform, 30-year old at the time of the accident. It is registered in the Marshall Islands. Its owner, Transocean Offshore International Ventures Limited, based in George Town, Cayman Islands and subsidiary of Transocean Ltd based in Zug, Switzerland, decided to get rid of the platform in light of its age and of the economic situation. -
A Guide to Writing As an Engineer, 4Th Edition
ﳉﻨﺔ ﺇﻟﻜﻢ ﺍﻷﻛﺎﺩﳝﻴﺔ Electrical | Computer | Mechatronics ELCOM-HU.com ﺗﻘﺪﻡ ﻛﺘﺎﺏ ﻣﺎﺩﺓ: ﺍﺧﻼﻗﻴﺎﺕ ﻭﻣﻬﺎﺭﺍﺕ ﺇﺗﺼﺎﻝ إرادة .. ثقة .. تغي www.ELCOM-HU.com Beer f01.tex V1 - 02/27/2013 7:13 A.M. Page ii Beer f01.tex V1 - 02/27/2013 7:13 A.M. Page i A GUIDE TO WRITING AS AN ENGINEER Beer f01.tex V1 - 02/27/2013 7:13 A.M. Page ii Beer f01.tex V1 - 02/27/2013 7:13 A.M. Page iii A GUIDE TO WRITING AS AN ENGINEER FOURTH EDITION David Beer Department of Electrical and Computer Engineering University of Texas at Austin David McMurrey Formerly of International Business Machines Corporation Currently, Austin Community College Beer f01.tex V1 - 02/27/2013 7:13 A.M. Page iv Publisher: Don Fowley Acquisitions Editor: Dan Sayre Editorial Assistant: Jessica Knecht Senior Product Designer: Jenny Welter Marketing Manager: Christopher Ruel Associate Production Manager: Joyce Poh Production Editor: Jolene Ling Cover Designer: Kenji Ngieng Production Management Services: Laserwords Private Limited Cover Photo Credit: © Rachel Watson/Getty Images, Inc. This book was set by Laserwords Private Limited. Cover and text printed and bound by Edwards Brothers Malloy. This book is printed on acid free paper. Founded in 1807, John Wiley & Sons, Inc. has been a valued source of knowledge and understanding for more than 200 years, helping people around the world meet their needs and fulfill their aspirations. Our company is built on a foundation of principles that include responsibility to the communities we serve and where we live and work. In 2008, we launched a Corporate Citizenship Initiative, a global effort to address the environmental, social, economic, and ethical challenges we face in our business. -

1455189355674.Pdf
THE STORYTeller’S THESAURUS FANTASY, HISTORY, AND HORROR JAMES M. WARD AND ANNE K. BROWN Cover by: Peter Bradley LEGAL PAGE: Every effort has been made not to make use of proprietary or copyrighted materi- al. Any mention of actual commercial products in this book does not constitute an endorsement. www.trolllord.com www.chenaultandgraypublishing.com Email:[email protected] Printed in U.S.A © 2013 Chenault & Gray Publishing, LLC. All Rights Reserved. Storyteller’s Thesaurus Trademark of Cheanult & Gray Publishing. All Rights Reserved. Chenault & Gray Publishing, Troll Lord Games logos are Trademark of Chenault & Gray Publishing. All Rights Reserved. TABLE OF CONTENTS THE STORYTeller’S THESAURUS 1 FANTASY, HISTORY, AND HORROR 1 JAMES M. WARD AND ANNE K. BROWN 1 INTRODUCTION 8 WHAT MAKES THIS BOOK DIFFERENT 8 THE STORYTeller’s RESPONSIBILITY: RESEARCH 9 WHAT THIS BOOK DOES NOT CONTAIN 9 A WHISPER OF ENCOURAGEMENT 10 CHAPTER 1: CHARACTER BUILDING 11 GENDER 11 AGE 11 PHYSICAL AttRIBUTES 11 SIZE AND BODY TYPE 11 FACIAL FEATURES 12 HAIR 13 SPECIES 13 PERSONALITY 14 PHOBIAS 15 OCCUPATIONS 17 ADVENTURERS 17 CIVILIANS 18 ORGANIZATIONS 21 CHAPTER 2: CLOTHING 22 STYLES OF DRESS 22 CLOTHING PIECES 22 CLOTHING CONSTRUCTION 24 CHAPTER 3: ARCHITECTURE AND PROPERTY 25 ARCHITECTURAL STYLES AND ELEMENTS 25 BUILDING MATERIALS 26 PROPERTY TYPES 26 SPECIALTY ANATOMY 29 CHAPTER 4: FURNISHINGS 30 CHAPTER 5: EQUIPMENT AND TOOLS 31 ADVENTurer’S GEAR 31 GENERAL EQUIPMENT AND TOOLS 31 2 THE STORYTeller’s Thesaurus KITCHEN EQUIPMENT 35 LINENS 36 MUSICAL INSTRUMENTS -
Waiting List
New Applicant Waiting List For your convenience, we have published our new applicant waiting list and our transfer list. The lists are sorted by date. To find your position on the list, simply reference the month, day and year in which you applied. New applicants and transfers are assigned based on application date, preference and availability. Please read the “Procedure for Assigning Seasonal Mooring Permits” in the Rules and Regulations section to see the order of assignments as dictated by the code of the Chicago Park District. The assignment process for transfers and new applicants is now a year round process. They can be conducted anywhere from a weekly to a monthly basis depending on availability, time of year, outstanding transfers and outstanding applications. The greatest availability occurs after the deadline for seasonal renewals, when non-renewed spaces become available. Transfers within harbors are done before transfers between harbors and there may be several rounds of each. Applications are done after the completion of the transfer rounds. If you contact us regarding an application, please refer to it by the date of the application, not the number listing. These numbers are simply the order at the time the list is printed and change as people receive an assignment and are removed from the list or withdraw applications. To search this document in Adobe Acrobat, click on the Search icon in the toolbar or select Search in the Edit menu at the top of the page. Legend Date - Date application was received Name - Name of applicant Length - Range of length of mooring requested Boat Type - Type of Boat Please note that this waiting list is current as of the date listed at the top of the page. -

Admiralty Ln C/3 Blythe St F/4 Charthouse Ln H/3 Deleon Ln E/3 Galleon Ln C/4 Jamaica St G/2 Marlin Ave C-D/5 Pavo Ln E/1 Radfor
Admiralty Ln C/3 Blythe St F/4 Charthouse Ln H/3 DeLeon Ln E/3 Galleon Ln C/4 Jamaica St G/2 Marlin Ave C-D/5 Pavo Ln E/1 Radford Ln F/4 Sea Horse Ct D/6 Tower Ln D/2 Albacore Ln C-D/6 Bobstay Ln G/4 Chebec Ln C/4 DeSoto Ln E/3 Galley Ln F/5 Jibstay Ln H/4 Marquette Ln E/3 Peary Ln E/3 Ram Ln F/2 Sea Island Ln B/5 Tower Green Ln D/2 Altair Ave E/1-2 Bodega St G/2 Chesapeake Ave H/2 Decatur St F/3 Galveston St G/2 Juno Ln E/2 Marsh Dr B/2 Pegasus Ln E/2 Ranger Cir C/4 Sea Spray Ln E/1 Transom Ln H/4 Anacapa Ln G/4 Bonita Ln C/6 Chess Dr B-C/2 Dewey St F/4 Gateshead Ct G/4 Jupiter Ct E/2 Martinique Ln G/3 Pelican Ct B/5 Reef Dr B/1 Shad Ct C/5 Trimaran St E/5 Andromeda Ln E/2 Boothbay Ave G/2 Chrysopolis Dr C/4 Diaz Ln E/3 Gateway Dr D/1 Masthead Ln H/4 Pensacola St G/2 Regulus St E/2 Shearwater Isle G-C/5 Trinadad Ln G/3 Anteres Ln E/2 Botany Ct G/3 Cityhomes Ln D/2 Dolphin Isle C/5 Genemi Ln E/1 Ketch Ct E/5 Matsonia Dr B/4 Perseus Ln E/2 Ribbon St C/6 Shell Blvd C-E/2-4 Triton Dr C/3 Antigua Ln G/4 Bounty Dr D/4 Civic Center Dr C/3 Dominica Ln G/4 Gibralter Ln G/3 Killdeer Ct B/4 Melbourne St G/4 Phoenix Ln F/2 Rickover Ln F/4 Shooting Star Isle C-D/5 Trysail Ct E/4 Apollo Ln E/2 Bowfin St D/5 Clipper Ln E/4 Dorado Ln E/2 Gloucester Ln F/3 King Ln F/4 Menhaden Ct D/6 Pilgrim Dr C/3-4 Rigel Ln E/2 Skipjack Ln H/3 Turnstone Ct B/5 Aquarius Ln E/1 Bowsprit Ln H/4 Cod St D/5 Dory Ln H/3 Goldhunter Ct B/3 Meridian Bay Ln D/1 Pinrail Ln G/4 Rock Harbor Ln H/2 Sloop Ct E/5 Ara Ln E/2 Bramble Ct D/6 Columba Ln E/3 Dove Ln C/5 Grebe St C/5 Laguna -

20. Foster City
FOSTER CITY MAP Admiralty Ln C/3 Blythe St F/4 Chebec Ln C/4 DeLeon Ln E/3 Foster Square Ln C-D/3 Jamaica St G/2 Marlin Ave C-D/5 Pavo Ln E/1 Radford Ln F/4 Sea Island Ln B/5 Tower Green Ln D/2 Albacore Ln C-D/6 Bobstay Ln G/4 Chesapeake Ave H/2 DeSoto Ln E/3 Galleon Ln C/4 Jibstay Ln H/4 Marquette Ln E/3 Peary Ln E/3 Ram Ln F/2 Sea Spray Ln E/1 Transom Ln H/4 Alma Ln C/3 Bodega St G/2 Chess Dr B-C/2 Decatur St F/3 Galley Ln F/5 Juno Ln E/2 Marsh Dr B/2 Pegasus Ln E/2 Ranger Cir C/4 Shad Ct C/5 Trimaran Ct E/5 Altair Ave E/1-2 Bonita Ln C/6 Chrysopolis Dr C/4 Dewey St F/4 Galveston St G/2 Jupiter Ct E/2 Martinique Ln G/3 Pelican Ct B/5 Reef Dr B/1 Shearwater Isle G-C/5 Trinidad Ln G/3 Anacapa Ln G/4 Boothbay Ave G/2 Cityhomes Ln D/2 Diaz Ln E/3 Gateshead Ct G/4 Masthead Ln H/4 Pensacola St G/2 Regulus St E/2 Shell Blvd C-E/2-4 Triton Dr C/3 Andromeda Ln E/2 Botany Ct G/3 Civic Center Dr C/3 Dolphin Isle C/5 Gateway Dr D/1 Matsonia Dr B/4 Perseus Ln E/2 Ribbon St C/6 Shooting Star Isle C-D/5 Triton Park Ln B-C/3 Anteres Ln E/2 Bounty Dr D/4 Clipper Ln E/4 Dominica Ln G/4 Genemi Ln E/1 Ketch Ct E/5 Melbourne St G/4 Phoenix Ln F/2 Rickover Ln F/4 Skipjack Ln H/3 Trysail Ct E/4 Antigua Ln G/4 Bowfin St D/5 Cod St D/5 Dorado Ln E/2 Gibralter Ln G/3 Killdeer Ct B/4 Menhaden Ct D/6 Pilgrim Dr C/3-4 Rigel Ln E/2 Sloop Ct E/5 Turnstone Ct B/5 Apollo Ln E/2 Bowspirit Ln H/4 Columba Ln E/3 Dory Ln H/3 Gloucester Ln F/3 King Ln F/4 Meridian Bay Ln D/1 Pinrail Ln G/4 Rock Harbor Ln H/2 Somerset Ln G/4 Aquarius Ln E/1 Bramble Ct D/6 Comet Dr C/3-4 -

Filing Port Code Filing Port Name Manifest Number Filing Date Last
Filing Last Port Call Sign Foreign Trade Official Voyage Vessel Type Dock Code Filing Port Name Manifest Number Filing Date Last Domestic Port Vessel Name Last Foreign Port Number IMO Number Country Code Number Number Vessel Flag Code Agent Name PAX Total Crew Operator Name Draft Tonnage Owner Name Dock Name InTrans 3002 TACOMA, WA 3002-2021-00246 1/15/2021 - EVER SMART VANCOUVER, BC MLBD9 9300403 CA 3 911137 108W GB 310 ACGI SHIPPING INC. 0 20 EVERGREEN MARINE (TAIWAN) LTD 35'6" 39564 EVERGREEN MARINE (UK) LTD PORT OF TACOMA, PIERCE COUNTY TERMNAL, CENTER BERTH DFL 0502 PROVIDENCE, RI 0502-2021-00153 1/15/2021 BALTIMORE, MD POSEIDON LEADER - 7JCO 9335965 - 6 140629 0001 JP 325 MORAN SHIPPING 0 23 NYK SHIP MANAGEMENT PTE. LTD. 27'11" 18900 NIPPON YUSEN KABUSHIKI KAISHA RHODE ISLAND ECONOMIC DEVELOPMENT CORP., PORT OF DAVISVILLE D 1816 PORT CANAVERAL, FL 1816-2021-00112 1/15/2021 - DISNEY FANTASY CASTAWAY CAY C6ZL6 9445590 BS 1 8001938 423 BS 350 Disney Cruise Lines 0 244 MAGICAL CRUISE COMPANY 28'2" 104391 DCL MANAGEMENT CT8 DISNEY CRUISE TERMINAL 8 D 3002 TACOMA, WA 3002-2021-00247 1/15/2021 - SEATTLE BRIDGE TOKYO 3FFH5 9560352 JP 3 41733-10-B 063E PA 310 NORTON LILLY INTERNATIONAL 0 21 YURI SHIPPING S.A. 31'6" 26914 YURI SHIPPING S.A. WASHINGTON UNITED TERMINALS, TACOMA WHARF (WUT) DFL 3005 BELLINGHAM, WA 3005-2021-00065 1/15/2021 - SEASPAN CAVALIER VANCOUVER, BC CFN6639 7434808 CA 1 369522 1 CA 431 B.R. anderson &n Co. 0 5 SEASPAN ULC 12'0" 14 SEASPAN ULC CONOCO PHILLIPS, FERNDALE REFINERY WHARF N 3005 BELLINGHAM, WA 3005-2021-00066 1/15/2021 - P.B.