Optimization of Broaching Tool Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Grinding Your Own Lathe Tools
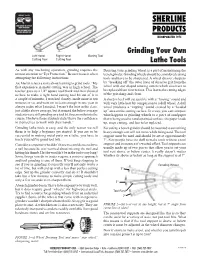
WEAR YOUR SAFETY GLASSES FORESIGHT IS BETTER THAN NO SIGHT READ INSTRUCTIONS BEFORE OPERATING Grinding Your Own Left Hand Right Hand Boring Tool Cutting Tool Cutting Tool Lathe Tools As with any machining operation, grinding requires the Dressing your grinding wheel is a part of maintaining the utmost attention to “Eye Protection.” Be sure to use it when bench grinder. Grinding wheels should be considered cutting attempting the following instructions. tools and have to be sharpened. A wheel dresser sharpens Joe Martin relates a story about learning to grind tools. “My by “breaking off” the outer layer of abrasive grit from the first experience in metal cutting was in high school. The wheel with star shaped rotating cutters which also have to teacher gave us a 1/4" square tool blank and then showed be replaced from time to time. This leaves the cutting edges us how to make a right hand cutting tool bit out of it in of the grit sharp and clean. a couple of minutes. I watched closely, made mine in ten A sharp wheel will cut quickly with a “hissing” sound and minutes or so, and went on to learn enough in one year to with very little heat by comparison to a dull wheel. A dull always make what I needed. I wasn’t the best in the class, wheel produces a “rapping” sound created by a “loaded just a little above average, but it seemed the below average up” area on the cutting surface. In a way, you can compare students were still grinding on a tool bit three months into the what happens to grinding wheels to a piece of sandpaper course. -

Introduction to Turning Tools and Their Application Identification and Application of Cutting Tools for Turning
Introduction to Turning Tools and their Application Identification and application of cutting tools for turning The variety of cutting tools available for modern CNC turning centers makes it imperative for machine operators to be familiar with different tool geometries and how they are applied to common turning processes. This course curriculum contains 16-hours of material for instructors to get their students ready to identify different types of turning tools and their uses. ©2016 MachiningCloud, Inc. All rights reserved. Table of Contents Introduction .................................................................................................................................... 2 Audience ..................................................................................................................................... 2 Purpose ....................................................................................................................................... 2 Lesson Objectives ........................................................................................................................ 2 Anatomy of a turning tool............................................................................................................... 3 Standard Inserts .............................................................................................................................. 3 ANSI Insert Designations ............................................................................................................. 3 Insert Materials -

High Pressure Waterjet
Application Note High Pressure Waterjet A water jet is a cutting tool capable of slicing metal or other materials by using a narrow stream of water at high velocity and pressure, or a mixture of water and an abrasive substance. The process erodes the materials in the same way as water erosion found in nature but accelerated and concentrated through high pressure. It is often used in the fabrication or manufacture of parts for machinery and other industries. It is used in applications in the mining to aerospace industries where it performs operations such as cutting, shaping, carving, and reaming. The water jet is usually connected to a high-pressure water pump (Viatran supplies units at 60K PSI) where the water is then ejected from the nozzle, cutting through the material by spraying it with the jet of high-speed water. Adding suspended grit or other abrasives, such as garnet and aluminum oxide, can accelerate this process. Because the characteristics of the cutting stream can be easily modified, water jets can be used to cut materials from processed food to exotic metals. There are few materials that cannot be effectively cut with a water jet cutter. Two of these are tempered glass and certain ceramics are resistant to water jet cutting. Water jet cuts are not typically limited by the thickness of the material, and are capable of cutting materials over a foot (30 cm) thick. An important benefit of the water jet cutter is the ability to cut material without compromising the material's inherent structure. The effects of heat are minimized by the water jet. -

Broaching Principles
Broaching Principles Broaching is a machining process that pushes or pulls a cutting tool (called a broach) over or through the surface being machined. Its high-production, metal-removal process is sometimes required to make one-of-a-kind parts. The concept of broaching as a legitimate machining process can be traced back to the early 1850s. Early broaching applications were cutting keyways in pulleys and gears. After World War 1, broaching contributed to the rifling of gun barrels. Advances in broaching machines and form grinding during the 1920s and 30s enabled tolerances to be tightened and broaching costs to become competitive with other machining processes. Today, almost every conceivable type of form and material can be broached. It represents a machining operation that, while known for many years, is still in its infancy. New uses for broaching are being devised every day. Figure 1. Cutting action of a broaching tool. Broaching is similar to planing, turning, milling, and other metal cutting operations in that each tooth removes a small amount of material (Figure 1 ). Figure 2. Typical push keyway broaching tools and a shim. The broaching tool has a series of teeth so arranged that they cut metal when the broach is given a linear movement as indicated in figure 1. The broach cuts away the material since its teeth are progressively increasing in height. Properly used, broaching can greatly increase productivity, hold tight tolerance, and produce precision finishes. Tooling is the heart of broaching. The broach tool's construction is unique for it combines rough, semi-finish, and finish teeth in one tool (Figure 3). -

Waterjet Cutting
Waterjet Cutting Waterjet cutting is one of today’s fastest-growing technologies and is quickly becoming a leading fabrication process. Waterjet cutting uses a high-pressure stream of water with an abrasive such as garnet to make the cut. No heat is generated during Waterjet cutting, eliminating the risk of material distortion. Edge finish of Waterjet machined parts is smooth and satiny, with no jagged edges, slag or burrs, eliminating the need for other finishing processes such as grinding. Water jet cutting technology utilizes high pressure water with an abrasive substance to create a cutting tool that travels at three times the speed of sound. With this tool, virtually any material can be cut with or without an abrasive in some Hi-Tech Welding is a one-stop service center for welding and cases. The Mitsubishi control, combined with a CAD-CAM fabrication in Lee’s Summit, MO. generated CNC code, allows for simple or complex shapes to be cut. Speed and accuracy (compensation is within In 1985 Hi-Tech Welding originally began as a tool and die welding ±0.005” per 36” length) are easy to achieve with the Waterjet facility. Over the years it has grown into a full welding and fabrication Intelligent Taper ControlTM System. shop. Waterjet Cuts Virtually Any Material Services offered • Laser Welding Waterjet cutting is suitable for nearly any material, and can • Tool and Die Welding cut any material up to 6” thick. • Waterjet Cutting • Welding Repair We have software that allows us to make high quality ducts, • Repair and Refurbishment fittings, flanges and brackets. -

Common Saw Types
Common Saw Types “Basic” Handsaw This is the most recognizable and the simplest to operate of all of saws. It works on wood of all types but is best for “soft” woods. Can be used for all types of cuts. Hack Saw This type of handsaw features a fine-toothed replaceable blade on a C-frame. Commonly used for cutting metals and plastics. Japanese Saws A saw type with a thinner blade with crosscut teeth on one side and rip teeth on the other. These saws are more often found in a fine woodworking or furniture making situation. Coping Saw Popular with artists, this simple but useful cutting tool consists of a thin replaceable blade in a C-shaped frame that uses interchangeable blades for both metal and wood. It can cut tight radiuses but perhaps its most useful feature is the ability to remove the blade and thread it through a drilled hole to cut inside profiles. Jigsaw/Reciprocating Saw If you’ve ever needed to cut a custom shape out of a sheet of plywood or even plastic, this is a great saw. If a perfectly straight line is what you need, then leave this tool on the shelf. Even in the hands of a skilled operator the blade will drift easily. Circular Saw This saw is the standard for making cross and rip cuts. If you van only have one powered saw, this is the one. When it is paired with a saw guide it can make surprisingly accurate cuts. Table Saw Ripping and beveling are the things the table saw does best. -

866-Evo-Tool
® ® 866-EVO-TOOL Evolution Industrial Full Range Catalog DOWNLOAD A FREE QR READER APP & SCAN THE QR CODE! Instantly watch all our HD Videos on your Smart Phone. Make sure the HD setting is turned on. If you don’t have a Smart Phone, you can also watch all the videos online at www.evolutionsteel.com. ® Company Profile Evolution is a leader in the steel and fabrication industry, offering industrial metal cutting products, metal drilling products and related accessories. With a strong focus on customer service and determination to achieve unmatched quality, Evolution offers the highest product value to a rapidly growing and changing market. Evolution's United States headquarters is based out of Davenport, Iowa, allowing centralized distribution for the entire North American customer base. Worldwide locations offer distribution in Europe, CONTENTS Asia, South America, Australia and Africa. “Innovation Defined” is the company motto and Evolution achieves this by continuously improving existing products and adding new Metal Cutting products to effectively complement Evolution’s current portfolio. EVOSAW185 - 7-1/4” Chop Saw ...........4 Quality Assurance & Warranty EVOSAW380 - 14” Chop Saw . .5 EVOSAW180HD - 7-1/4" Circular Saw . 6 All Evolution power tools are put through quality assurance EVOSAW230 - 9” Circular Saw . 7 testing and are guaranteed to be free of defects in workmanship Industrial Saw Blade Range . 8 or materials for three years from the date of purchase. Refer to Evolution's instruction manuals for full details. Industrial Magnetic Drilling All warranty claims must be submitted by the owner/user of the product and can only be evaluated and authorized by Evolution's EVOMAG28 - 1-1/8" x 2" Magnetic Drill . -

South Bay Machining Feeds and Speeds (Drill, Lathe, Mill)
SouthBayMachine.com Integrated Design - Advanced Manufacturing SouthBay Venice Set-ups Links Machine Machine Home Home Machine tools are dangerous and may cause great injury. This information was collected from a variety of sources, is neither complete nor verified, and is of a general nature for theoretical study only. Any attempt to duplicate the operations described should be done with the guidance and supervision of a qualified instructor who will teach the appropriate safety skills and fill in the missing details. Follow this link for Statements of Warning, Limitation & Responsibility. Cutting Speed & Feed Rates You should calculate RPM & Feed whenever machining with a Mill, Drill or Lathe. Experienced machinists often "fudge it" while manual machining, making changes based on the "feel" of the machine and the sound of the cut. With CNC the RPM & Feeds need to be right before you hit the green button. Definitions & Explinations Quick RPM Table Cutting Speeds and Lathe Feed Calculating RPM Milling Machine Feed Rates Calculating Feed My Tests with Plastic Speed and Feed Links Cutting Speed(CS) of a material is the ideal number of Feet-per- Minute that the tool-bit should pass over the work-piece. This "Ideal" cutting speed assumes sharp tools and flood coolant. Adjustments need to be made for less than ideal cutting conditions. Different materials (High-Carbon/Low-Carbon Steels, Aluminums, Different kinds of Plastics) have different Cutting Speeds and can be worked/cut at different rates. In addition, some tools or processes (like threading, knurling, or cutting-off) will need to be worked at slower speeds than the Cutting Speed would indicate. -
REAMERS Made & Shipped Within 24 Hours!
SOLID CARBIDE REAMERS Made & Shipped within 24 Hours! TOOL OF THE YEAR AWARD 2018 WINNER CONTOUR360° Wins Inaugural… ANCA “Tool Of The Year” Award “Tool's profile accuracy and complex geometry cut out to be winner!” Contour360º, designer and manufacturer of high performance solid carbide round shank tooling, has won the Anca Tool of the Year award for its creative and eye- catching tool. Entries were received from 27 countries. The judging criteria was: • best surface finish in Ra (roughness average) value on the flute or gash surface • tool closest to the nominal tolerance as stated on the drawing in terms of diameter and profile (i.e., if the diameter tolerance is +/- 0.010mm and the tool is measured to 0.005 then this will rank favourably) • tool that has been ground to the tightest tolerance as per the drawing (tool with the lowest tolerance will rank favourably) • complexity level (in terms of the number of steps, profiles) ANCA joint co-founder Mr. Pat Boland noted: “After measuring the surface finish and geometry on the Alicona and Zoller machines respectively; all votes were tallied and Contour360° won for their complex tool that was brilliantly executed. Grinding a complex tool like that requires sharp wheels, accurate qualification of wheels and a perfect set-up.” CONTOUR360° is YOUR high performance partner in the manufacturing of high performance tooling! TOOL OF THE YEAR AWARD 2018 WINNER PROUDLY MANUFACTURED REAMER360° IN CORNISH, MAINE REAMER360° cutting tool technologies cutting tool technologies SPEED AND FEED CHART SFM -
Tools for Tile & Stone Catalog
TOOLS FOR TILE & STONE CONTRACTORS CUTTING, PROFILING & POLISHING TH Since 1986 Celebrating 35 Years Providing Better Solutions to the Professional VERSION 6 CONTACT US WELCOME Alpha Professional Tools® was founded in 1986 and has become a leading manufacturer of quality tools for professionals in the natural/engineered stone, porcelain, ceramic, glass, construction, marine and automotive industries. Alpha® provides the best products for cutting, drilling, shaping and polishing all types of materials. In addition to providing the best products in the industry, Alpha Professional Tools® offers a variety of services to support their products. Company Contact Information: Headquarters & 16 Park Drive Training Center: Franklin, NJ 07416 Hours of Operation (EST): 8:30 a.m. - 5:00 p.m. Telephone No: 201-337-3343 Toll-Free No: 800-648-7229 Fax No: 201-337-2216 Toll Free Fax No: 800-286-0114 E-mail Orders to: Contact Us: [email protected] www.alpha-tools.com [email protected] [email protected] Follow Us: Sales Contacts by Territory – [email protected] Caribbean 201-337-3343 Ohio Valley 440-364-3759 Canada 519-546-9861 Pacific 800-648-7229 International 201-337-3343 South 480-848-6808 Midwest 630-849-7105 Southeast 678-977-1147 Northeast 973-830-7681 Southern CA 925-428-1292 Northern CA 925-428-1292 TABLE OF CONTENTS TOOLS STONE CUTTER • ESC-125, Wet Stone Cutter .......................................................................................2 • Countertop Trim Kit ....................................................................................................4 -

The Circular Saw Blades Used in the Current Work Were Manufactured from Solid M2 HSS
INVESTIGATION OF THE WEAR AND FAILURE MODES OF SURFACE ENGINEERED MULTIPOINT CUTTING TOOLS. A thesis submitted for the fulfilment of the requirements for the degree of Master of Engineering at Dublin City University. Martin G. Fleming B Sc. Department of Mechanical and Manufacturing Engineering. August 1992 Supervisor: Prof. M S J. Hashmi " It is a good thing to have two ways of looking at a subject, and to admit that there are two ways of looking at it. " JAMES CLERK MAXWELL (1831-1879) TO MY FAMILY DECLARATION I hereby declare that all the work prepared in this thesis was carried out by me at EOLAS (The Irish Science & Technology Agency) during the period February 1990 to August 1992 To the best of my knowledge, the results presented in this thesis orginated from the present study except where references have been made No part of this thesis has been submitted for a degree at any other institution Signature of Candidate ¿ fa * ' Martin G Fleming ACKNOWLEDGEMENTS This current work, was only made possible through the kind assistance of a number of my colleagues in the Materials Technology and Ceramics Research Departments in EOLAS whose assistance and goodwill I have much appreciated. Firstly thanks are due to Dr. Tony Carroll, Head of the Materials Technology Department, EOLAS for allowing me to pursue this research through the Departments EC-BRITE Cutting Tool Research Project. I am indebted to Mr. Bill Hogan for his technical assistance and the many constructive discussions throughout my work in EOLAS. Further thanks are due to my colleagues namely Tony Horan, Richard Murphy, Colin Pope, Dr. -

600W Tile Cutter
600W TILE CUTTER TC180S ORIGINAL INSTRUCTIONS ORIGINAL INSTRUCTIONS INTRODUCTION 2. Electrical Safety Thank you for purchasing a a. Store idle tools. When not in use, tools CHALLENGE XTREME 600W Tile Cutter. should be stored in a dry, high or We would like you to be completely locked-up place, out of the reach of children. satisfied with your new product and b. Guard against electric shock. Avoid hope you get many years of body contact with earthed or grounded satisfaction out of this tool. surfaces (e.g. pipes, radiators, ranges, Your tile cutter is designed to perform cutting refrigerators etc.) jobs on small and medium tiles (floor and c. Do not abuse the cord. Never carry wall tiles made of ceramic and similar tool by cord or yank it to disconnect it from material) which suit the machine’s size. wall outlet. Keep cord away from heat, oil, It is intended in particular for use by DIY sharp edges and moving parts. Damage or enthusiasts and craftsmen. entangled cords increase the risk of electric shocks. The machine is to be used solely for d. Outdoor use extension cords. When its intended purpose. Never use it tool is used outdoors, use only extension to cut wood or metal material. cords intended for use outdoors and marked as such. e. Use a residual current device (RCD) GENERAL SAFETY protected supply. Use of a RCD will reduce the risk of electric shock to the user. INSTRUCTIONS f. Power tool plugs must match the outlet. Never modify the plug in any way. When using electric products, in Do not use any adapter plugs with earthed order to reduce the risk of fire, (grounded) power tools.