Design and Analysis of Ecological Data Landscape of Statistical Methods: Part 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Simple Sample Size Formula for Analysis of Covariance in Randomized Clinical Trials George F
Journal of Clinical Epidemiology 60 (2007) 1234e1238 ORIGINAL ARTICLE A simple sample size formula for analysis of covariance in randomized clinical trials George F. Borma,*, Jaap Fransenb, Wim A.J.G. Lemmensa aDepartment of Epidemiology and Biostatistics, Radboud University Nijmegen Medical Centre, Geert Grooteplein 21, PO Box 9101, NL-6500 HB Nijmegen, The Netherlands bDepartment of Rheumatology, Radboud University Nijmegen Medical Centre, Geert Grooteplein 21, PO Box 9101, NL-6500 HB Nijmegen, The Netherlands Accepted 15 February 2007 Abstract Objective: Randomized clinical trials that compare two treatments on a continuous outcome can be analyzed using analysis of covari- ance (ANCOVA) or a t-test approach. We present a method for the sample size calculation when ANCOVA is used. Study Design and Setting: We derived an approximate sample size formula. Simulations were used to verify the accuracy of the for- mula and to improve the approximation for small trials. The sample size calculations are illustrated in a clinical trial in rheumatoid arthritis. Results: If the correlation between the outcome measured at baseline and at follow-up is r, ANCOVA comparing groups of (1 À r2)n subjects has the same power as t-test comparing groups of n subjects. When on the same data, ANCOVA is usedpffiffiffiffiffiffiffiffiffiffiffiffiffi instead of t-test, the pre- cision of the treatment estimate is increased, and the length of the confidence interval is reduced by a factor 1 À r2. Conclusion: ANCOVA may considerably reduce the number of patients required for a trial. Ó 2007 Elsevier Inc. All rights reserved. Keywords: Power; Sample size; Precision; Analysis of covariance; Clinical trial; Statistical test 1. -

Understanding Linear and Logistic Regression Analyses
EDUCATION • ÉDUCATION METHODOLOGY Understanding linear and logistic regression analyses Andrew Worster, MD, MSc;*† Jerome Fan, MD;* Afisi Ismaila, MSc† SEE RELATED ARTICLE PAGE 105 egression analysis, also termed regression modeling, come). For example, a researcher could evaluate the poten- Ris an increasingly common statistical method used to tial for injury severity score (ISS) to predict ED length-of- describe and quantify the relation between a clinical out- stay by first producing a scatter plot of ISS graphed against come of interest and one or more other variables. In this ED length-of-stay to determine whether an apparent linear issue of CJEM, Cummings and Mayes used linear and lo- relation exists, and then by deriving the best fit straight line gistic regression to determine whether the type of trauma for the data set using linear regression carried out by statis- team leader (TTL) impacts emergency department (ED) tical software. The mathematical formula for this relation length-of-stay or survival.1 The purpose of this educa- would be: ED length-of-stay = k(ISS) + c. In this equation, tional primer is to provide an easily understood overview k (the slope of the line) indicates the factor by which of these methods of statistical analysis. We hope that this length-of-stay changes as ISS changes and c (the “con- primer will not only help readers interpret the Cummings stant”) is the value of length-of-stay when ISS equals zero and Mayes study, but also other research that uses similar and crosses the vertical axis.2 In this hypothetical scenario, methodology. -

Analysis of Covariance (ANCOVA) in Randomized Trials: More Precision
Johns Hopkins University, Dept. of Biostatistics Working Papers 10-19-2018 Analysis of Covariance (ANCOVA) in Randomized Trials: More Precision, Less Conditional Bias, and Valid Confidence Intervals, Without Model Assumptions Bingkai Wang Department of Biostatistics, Johns Hopkins University Elizabeth Ogburn Department of Biostatistics, Johns Hopkins University Michael Rosenblum Department of Biostatistics, Johns Hopkins University, [email protected] Suggested Citation Wang, Bingkai; Ogburn, Elizabeth; and Rosenblum, Michael, "Analysis of Covariance (ANCOVA) in Randomized Trials: More Precision, Less Conditional Bias, and Valid Confidence Intervals, Without Model Assumptions" (October 2018). Johns Hopkins University, Dept. of Biostatistics Working Papers. Working Paper 292. https://biostats.bepress.com/jhubiostat/paper292 This working paper is hosted by The Berkeley Electronic Press (bepress) and may not be commercially reproduced without the permission of the copyright holder. Copyright © 2011 by the authors Analysis of Covariance (ANCOVA) in Randomized Trials: More Precision, Less Conditional Bias, and Valid Confidence Intervals, Without Model Assumptions BINGKAI WANG, ELIZABETH OGBURN, MICHAEL ROSENBLUM∗ Department of Biostatistics, Johns Hopkins Bloomberg School of Public Health, 615 North Wolfe Street, Baltimore, Maryland 21205, USA [email protected] Summary \Covariate adjustment" in the randomized trial context refers to an estimator of the average treatment effect that adjusts for chance imbalances between study arms in baseline variables (called \covariates"). The baseline variables could include, e.g., age, sex, disease severity, and biomarkers. According to two surveys of clinical trial reports, there is confusion about the sta- tistical properties of covariate adjustment. We focus on the ANCOVA estimator, which involves fitting a linear model for the outcome given the treatment arm and baseline variables, and trials with equal probability of assignment to treatment and control. -

Generalized Linear Models
Generalized Linear Models A generalized linear model (GLM) consists of three parts. i) The first part is a random variable giving the conditional distribution of a response Yi given the values of a set of covariates Xij. In the original work on GLM’sby Nelder and Wedderburn (1972) this random variable was a member of an exponential family, but later work has extended beyond this class of random variables. ii) The second part is a linear predictor, i = + 1Xi1 + 2Xi2 + + ··· kXik . iii) The third part is a smooth and invertible link function g(.) which transforms the expected value of the response variable, i = E(Yi) , and is equal to the linear predictor: g(i) = i = + 1Xi1 + 2Xi2 + + kXik. ··· As shown in Tables 15.1 and 15.2, both the general linear model that we have studied extensively and the logistic regression model from Chapter 14 are special cases of this model. One property of members of the exponential family of distributions is that the conditional variance of the response is a function of its mean, (), and possibly a dispersion parameter . The expressions for the variance functions for common members of the exponential family are shown in Table 15.2. Also, for each distribution there is a so-called canonical link function, which simplifies some of the GLM calculations, which is also shown in Table 15.2. Estimation and Testing for GLMs Parameter estimation in GLMs is conducted by the method of maximum likelihood. As with logistic regression models from the last chapter, the generalization of the residual sums of squares from the general linear model is the residual deviance, Dm 2(log Ls log Lm), where Lm is the maximized likelihood for the model of interest, and Ls is the maximized likelihood for a saturated model, which has one parameter per observation and fits the data as well as possible. -
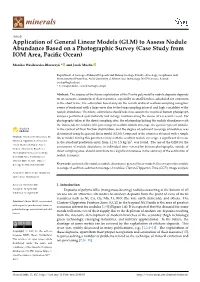
Application of General Linear Models (GLM) to Assess Nodule Abundance Based on a Photographic Survey (Case Study from IOM Area, Pacific Ocean)
minerals Article Application of General Linear Models (GLM) to Assess Nodule Abundance Based on a Photographic Survey (Case Study from IOM Area, Pacific Ocean) Monika Wasilewska-Błaszczyk * and Jacek Mucha Department of Geology of Mineral Deposits and Mining Geology, Faculty of Geology, Geophysics and Environmental Protection, AGH University of Science and Technology, 30-059 Cracow, Poland; [email protected] * Correspondence: [email protected] Abstract: The success of the future exploitation of the Pacific polymetallic nodule deposits depends on an accurate estimation of their resources, especially in small batches, scheduled for extraction in the short term. The estimation based only on the results of direct seafloor sampling using box corers is burdened with a large error due to the long sampling interval and high variability of the nodule abundance. Therefore, estimations should take into account the results of bottom photograph analyses performed systematically and in large numbers along the course of a research vessel. For photographs taken at the direct sampling sites, the relationship linking the nodule abundance with the independent variables (the percentage of seafloor nodule coverage, the genetic types of nodules in the context of their fraction distribution, and the degree of sediment coverage of nodules) was determined using the general linear model (GLM). Compared to the estimates obtained with a simple Citation: Wasilewska-Błaszczyk, M.; linear model linking this parameter only with the seafloor nodule coverage, a significant decrease Mucha, J. Application of General in the standard prediction error, from 4.2 to 2.5 kg/m2, was found. The use of the GLM for the Linear Models (GLM) to Assess assessment of nodule abundance in individual sites covered by bottom photographs, outside of Nodule Abundance Based on a direct sampling sites, should contribute to a significant increase in the accuracy of the estimation of Photographic Survey (Case Study nodule resources. -

The Simple Linear Regression Model
The Simple Linear Regression Model Suppose we have a data set consisting of n bivariate observations {(x1, y1),..., (xn, yn)}. Response variable y and predictor variable x satisfy the simple linear model if they obey the model yi = β0 + β1xi + ǫi, i = 1,...,n, (1) where the intercept and slope coefficients β0 and β1 are unknown constants and the random errors {ǫi} satisfy the following conditions: 1. The errors ǫ1, . , ǫn all have mean 0, i.e., µǫi = 0 for all i. 2 2 2 2. The errors ǫ1, . , ǫn all have the same variance σ , i.e., σǫi = σ for all i. 3. The errors ǫ1, . , ǫn are independent random variables. 4. The errors ǫ1, . , ǫn are normally distributed. Note that the author provides these assumptions on page 564 BUT ORDERS THEM DIFFERENTLY. Fitting the Simple Linear Model: Estimating β0 and β1 Suppose we believe our data obey the simple linear model. The next step is to fit the model by estimating the unknown intercept and slope coefficients β0 and β1. There are various ways of estimating these from the data but we will use the Least Squares Criterion invented by Gauss. The least squares estimates of β0 and β1, which we will denote by βˆ0 and βˆ1 respectively, are the values of β0 and β1 which minimize the sum of errors squared S(β0, β1): n 2 S(β0, β1) = X ei i=1 n 2 = X[yi − yˆi] i=1 n 2 = X[yi − (β0 + β1xi)] i=1 where the ith modeling error ei is simply the difference between the ith value of the response variable yi and the fitted/predicted valuey ˆi. -

Robust Bayesian General Linear Models ⁎ W.D
www.elsevier.com/locate/ynimg NeuroImage 36 (2007) 661–671 Robust Bayesian general linear models ⁎ W.D. Penny, J. Kilner, and F. Blankenburg Wellcome Department of Imaging Neuroscience, University College London, 12 Queen Square, London WC1N 3BG, UK Received 22 September 2006; revised 20 November 2006; accepted 25 January 2007 Available online 7 May 2007 We describe a Bayesian learning algorithm for Robust General Linear them from the data (Jung et al., 1999). This is, however, a non- Models (RGLMs). The noise is modeled as a Mixture of Gaussians automatic process and will typically require user intervention to rather than the usual single Gaussian. This allows different data points disambiguate the discovered components. In fMRI, autoregressive to be associated with different noise levels and effectively provides a (AR) modeling can be used to downweight the impact of periodic robust estimation of regression coefficients. A variational inference respiratory or cardiac noise sources (Penny et al., 2003). More framework is used to prevent overfitting and provides a model order recently, a number of approaches based on robust regression have selection criterion for noise model order. This allows the RGLM to default to the usual GLM when robustness is not required. The method been applied to imaging data (Wager et al., 2005; Diedrichsen and is compared to other robust regression methods and applied to Shadmehr, 2005). These approaches relax the assumption under- synthetic data and fMRI. lying ordinary regression that the errors be normally (Wager et al., © 2007 Elsevier Inc. All rights reserved. 2005) or identically (Diedrichsen and Shadmehr, 2005) distributed. In Wager et al. -
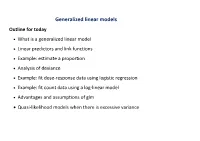
Generalized Linear Models Outline for Today
Generalized linear models Outline for today • What is a generalized linear model • Linear predictors and link functions • Example: estimate a proportion • Analysis of deviance • Example: fit dose-response data using logistic regression • Example: fit count data using a log-linear model • Advantages and assumptions of glm • Quasi-likelihood models when there is excessive variance Review: what is a (general) linear model A model of the following form: Y = β0 + β1X1 + β2 X 2 + ...+ error • Y is the response variable • The X ‘s are the explanatory variables • The β ‘s are the parameters of the linear equation • The errors are normally distributed with equal variance at all values of the X variables. • Uses least squares to fit model to data, estimate parameters • lm in R The predicted Y, symbolized here by µ, is modeled as µ = β0 + β1X1 + β2 X 2 + ... What is a generalized linear model A model whose predicted values are of the form g(µ) = β0 + β1X1 + β2 X 2 + ... • The model still include a linear predictor (to right of “=”) • g(µ) is the “link function” • Wide diversity of link functions accommodated • Non-normal distributions of errors OK (specified by link function) • Unequal error variances OK (specified by link function) • Uses maximum likelihood to estimate parameters • Uses log-likelihood ratio tests to test parameters • glm in R The two most common link functions Log • used for count data η η = logµ The inverse function is µ = e Logistic or logit • used for binary data µ eη η = log µ = 1− µ The inverse function is 1+ eη In all cases log refers to natural logarithm (base e). -

Application of Polynomial Regression Models for Prediction of Stress State in Structural Elements
Global Journal of Pure and Applied Mathematics. ISSN 0973-1768 Volume 12, Number 4 (2016), pp. 3187-3199 © Research India Publications http://www.ripublication.com/gjpam.htm Application of polynomial regression models for prediction of stress state in structural elements E. Ostertagová, P. Frankovský and O. Ostertag Assistant Professor, Department of Mathematics and Theoretical Informatics, Faculty of Electrical Engineering, Technical University of Košice, Slovakia Associate Professors, Department of Applied Mechanics and Mechanical Engineering Faculty of Mechanical Engineering, Technical University of Košice, Slovakia Abstract This paper presents the application of linear regression model for processing of stress state data which were collected through drilling into a structural element. The experiment was carried out by means of reflection photoelasticity. The harmonic star method (HSM) established by the authors was used for the collection of final data. The non-commercial software based on the harmonic star method enables us to automate the process of measurement for direct collection of experiment data. Such software enabled us to measure stresses in a certain point of the examined surface and, at the same time, separate these stresses, i.e. determine the magnitude of individual stresses. A data transfer medium, i.e. a camera, was used to transfer the picture of isochromatic fringes directly to a computer. Keywords: principal normal stresses, harmonic star method, simple linear regression, root mean squared error, mean absolute percentage error, R-squared, adjusted R-squared, MATLAB. Introduction Residual stresses are stresses which occur in a material even if the object is not loaded by external forces. The analysis of residual stresses is very important when determining actual stress state of structural elements. -
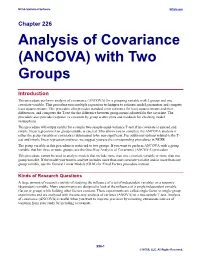
Analysis of Covariance (ANCOVA) with Two Groups
NCSS Statistical Software NCSS.com Chapter 226 Analysis of Covariance (ANCOVA) with Two Groups Introduction This procedure performs analysis of covariance (ANCOVA) for a grouping variable with 2 groups and one covariate variable. This procedure uses multiple regression techniques to estimate model parameters and compute least squares means. This procedure also provides standard error estimates for least squares means and their differences, and computes the T-test for the difference between group means adjusted for the covariate. The procedure also provides response vs covariate by group scatter plots and residuals for checking model assumptions. This procedure will output results for a simple two-sample equal-variance T-test if no covariate is entered and simple linear regression if no group variable is entered. This allows you to complete the ANCOVA analysis if either the group variable or covariate is determined to be non-significant. For additional options related to the T- test and simple linear regression analyses, we suggest you use the corresponding procedures in NCSS. The group variable in this procedure is restricted to two groups. If you want to perform ANCOVA with a group variable that has three or more groups, use the One-Way Analysis of Covariance (ANCOVA) procedure. This procedure cannot be used to analyze models that include more than one covariate variable or more than one group variable. If the model you want to analyze includes more than one covariate variable and/or more than one group variable, use the General Linear Models (GLM) for Fixed Factors procedure instead. Kinds of Research Questions A large amount of research consists of studying the influence of a set of independent variables on a response (dependent) variable. -

Chapter 2 Simple Linear Regression Analysis the Simple
Chapter 2 Simple Linear Regression Analysis The simple linear regression model We consider the modelling between the dependent and one independent variable. When there is only one independent variable in the linear regression model, the model is generally termed as a simple linear regression model. When there are more than one independent variables in the model, then the linear model is termed as the multiple linear regression model. The linear model Consider a simple linear regression model yX01 where y is termed as the dependent or study variable and X is termed as the independent or explanatory variable. The terms 0 and 1 are the parameters of the model. The parameter 0 is termed as an intercept term, and the parameter 1 is termed as the slope parameter. These parameters are usually called as regression coefficients. The unobservable error component accounts for the failure of data to lie on the straight line and represents the difference between the true and observed realization of y . There can be several reasons for such difference, e.g., the effect of all deleted variables in the model, variables may be qualitative, inherent randomness in the observations etc. We assume that is observed as independent and identically distributed random variable with mean zero and constant variance 2 . Later, we will additionally assume that is normally distributed. The independent variables are viewed as controlled by the experimenter, so it is considered as non-stochastic whereas y is viewed as a random variable with Ey()01 X and Var() y 2 . Sometimes X can also be a random variable. -
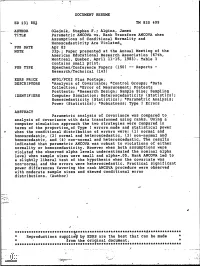
Parametric ANCOVA Vs. Rank Transform ANCOVA When
DOCUMENT RESUME ED 231 882 TM 830 499 AUTHOR -01-ejn4-k, Stephen F.; Algina, James TITLE Parametric ANCOVA vs. Rank Transform ANCOVA when Assumptions of Conditional Normality and Homoscedasticity Are Violated4 PUB DATE Apr 83 NOTE 33p.; Paper presented at the Annual Meeting of the American Educational Research Association (67th, Montreal, Quebec, April 11-15, 1983). Table 3 contains small print. PUB TYPE Speeches/Conference Papers (150) -- Reports - Research/Technical (143) EDRS PRICE MF01/PCO2 Plus Postage. DESCRIPTORS *Analysis of Covariance; *Control Groups; *Data Collection; *Error of Measurement; Pretests Posttests; *Research Design; Sample Size; Sampling IDENTIFIERS Computer Simulation; Heteroscedasticity (Statistics); Homoscedasticity (Statistics); *Parametric Analysis; Power (Statistics); *Robustness; Type I Errors ABSTRACT Parametric analysis of covariance was compared to analysis of covariance with data transformed using ranks."Using computer simulation approach the two strategies were compared in terms of the proportion,of TypeI errors made and statistical power s when the conditional distribution of err-ors were: (1) normal and homoscedastic, (2) normal and heteroscedastic, (3) non-normal and homoscedastic, and (4) non-normal and heteroscedastic. The results indicated that parametric ANCOVA was robust to violations of either normality or homoscedasticity. However when both assumptions were violated the observed alpha levels underestimated the nominal 'alpha level when sample sizes were small and alpha=.05. Rank ANCOVA led to a slightly liberal test of the hypothesis when the covariate was non-normal and the errors were heteroscedastic. Practical significant power differences favoring the rank ANCOVA procedure were observed with moderate sample sizes and skewed conditional error distributions. (Author) ************************* *****************************f************** Reproductions supplie by EDRS are the best that can be made from the original document.