Electromagnetic Hysteresis Modelling: from Material Science to Finite Element Analysis of Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Magnetic Hysteresis
Magnetic hysteresis Magnetic hysteresis* 1.General properties of magnetic hysteresis 2.Rate-dependent hysteresis 3.Preisach model *this is virtually the same lecture as the one I had in 2012 at IFM PAN/Poznań; there are only small changes/corrections Urbaniak Urbaniak J. Alloys Compd. 454, 57 (2008) M[a.u.] -2 -1 M(H) hysteresesof thin filmsM(H) 0 1 2 Co(0.6 Co(0.6 nm)/Au(1.9 nm)] [Ni Ni 80 -0.5 80 Fe Fe 20 20 (2 nm)/Au(1.9(2 nm)/ (38 nm) (38 Magnetic materials nanoelectronics... in materials Magnetic H[kA/m] 0.0 10 0.5 J. Magn. Magn. Mater. Mater. Magn. J. Magn. 190 , 187 (1998) 187 , Ni 80 Fe 20 (4nm)/Mn 83 Ir 17 (15nm)/Co 70 Fe 30 (3 nm)/Al(1.4nm)+Ox/Ni Ni 83 Fe 17 80 (2 nm)/Cu(2 nm) Fe 20 (4 nm)/Ta(3 nm) nm)/Ta(3 (4 Phys. Stat. Sol. (a) 199, 284 (2003) Phys. Stat. Sol. (a) 186, 423 (2001) M(H) hysteresis ●A hysteresis loop can be expressed in terms of B(H) or M(H) curves. ●In soft magnetic materials (small Hs) both descriptions differ negligibly [1]. ●In hard magnetic materials both descriptions differ significantly leading to two possible definitions of coercive field (and coercivity- see lecture 2). ●M(H) curve better reflects the intrinsic properties of magnetic materials. B, M Hc2 H Hc1 Urbaniak Magnetic materials in nanoelectronics... M(H) hysteresis – vector picture Because field H and magnetization M are vector quantities the full description of hysteresis should include information about the magnetization component perpendicular to the applied field – it gives more information than the scalar measurement. -
EM4: Magnetic Hysteresis – Lab Manual – (Version 1.001A)
CHALMERS UNIVERSITY OF TECHNOLOGY GOTEBORÄ G UNIVERSITY EM4: Magnetic Hysteresis { Lab manual { (version 1.001a) Students: ........................................... & ........................................... Date: .... / .... / .... Laboration passed: ........................ Supervisor: ........................................... Date: .... / .... / .... Raluca Morjan Sergey Prasalovich April 7, 2003 Magnetic Hysteresis 1 Aims: In this laboratory session you will learn about the basic principles of mag- netic hysteresis; learn about the properties of ferromagnetic materials and determine their dissipation energy of remagnetization. Questions: (Please answer on the following questions before coming to the laboratory) 1) What classes of magnetic materials do you know? 2) What is a `magnetic domain'? 3) What is a `magnetic permeability' and `relative permeability'? 4) What is a `hysteresis loop' and how it can be recorded? (How you can measure a magnetization and magnetic ¯eld indirectly?) 5) What is a `saturation point' and `magnetization curve' for a hysteresis loop? 6) How one can demagnetize a ferromagnet? 7) What is the energy dissipation in one full hysteresis loop and how it can be calculated from an experiment? Equipment list: 1 Sensor-CASSY 1 U-core with yoke 2 Coils (N = 500 turnes, L = 2,2 mH) 1 Clamping device 1 Function generator S12 2 12 V DC power supplies 1 STE resistor 1, 2W 1 Socket board section 1 Connecting lead, 50 cm 7 Connecting leads, 100 cm 1 PC with Windows 98 and CASSY Lab software Magnetic Hysteresis 2 Introduction In general, term \hysteresis" (comes from Greek \hyst¶erÄesis", - lag, delay) means that value describing some physical process is ambiguously dependent on an external parameter and antecedent history of that value must be taken into account. The term was added to the vocabulary of physical science by J. -

Tailored Magnetic Properties of Exchange-Spring and Ultra Hard Nanomagnets
Max-Planck-Institute für Intelligente Systeme Stuttgart Tailored Magnetic Properties of Exchange-Spring and Ultra Hard Nanomagnets Kwanghyo Son Dissertation An der Universität Stuttgart 2017 Tailored Magnetic Properties of Exchange-Spring and Ultra Hard Nanomagnets Von der Fakultät Mathematik und Physik der Universität Stuttgart zur Erlangung der Würde eines Doktors der Naturwissenschaften (Dr. rer. nat.) genehmigte Abhandlung Vorgelegt von Kwanghyo Son aus Seoul, SüdKorea Hauptberichter: Prof. Dr. Gisela Schütz Mitberichter: Prof. Dr. Sebastian Loth Tag der mündlichen Prüfung: 04. Oktober 2017 Max‐Planck‐Institut für Intelligente Systeme, Stuttgart 2017 II III Contents Contents ..................................................................................................................................... 1 Chapter 1 ................................................................................................................................... 1 General Introduction ......................................................................................................... 1 Structure of the thesis ....................................................................................................... 3 Chapter 2 ................................................................................................................................... 5 Basic of Magnetism .......................................................................................................... 5 2.1 The Origin of Magnetism ....................................................................................... -

Vocabulary of Magnetism
TECHNotes The Vocabulary of Magnetism Symbols for key magnetic parameters continue to maximum energy point and the value of B•H at represent a challenge: they are changing and vary this point is the maximum energy product. (You by author, country and company. Here are a few may have noticed that typing the parentheses equivalent symbols for selected parameters. for (BH)MAX conveniently avoids autocorrecting Subscripts in symbols are often ignored so as to the two sequential capital letters). Units of simplify writing and typing. The subscripted letters maximum energy product are kilojoules per are sometimes capital letters to be more legible. In cubic meter, kJ/m3 (SI) and megagauss•oersted, ASTM documents, symbols are italicized. According MGOe (cgs). to NIST’s guide for the use of SI, symbols are not italicized. IEC uses italics for the main part of the • µr = µrec = µ(rec) = recoil permeability is symbol, but not for the subscripts. I have not used measured on the normal curve. It has also been italics in the following definitions. For additional called relative recoil permeability. When information the reader is directed to ASTM A340[11] referring to the corresponding slope on the and the NIST Guide to the use of SI[12]. Be sure to intrinsic curve it is called the intrinsic recoil read the latest edition of ASTM A340 as it is permeability. In the cgs-Gaussian system where undergoing continual updating to be made 1 gauss equals 1 oersted, the intrinsic recoil consistent with industry, NIST and IEC usage. equals the normal recoil minus 1. -

Magnetic Hysteresis and Basic Magnetometry
3 Magnetic hysteresis and basic magnetometry Magnetic reversal in thin films and some relevant experimental methods Maciej Urbaniak IFM PAN 2012 Today's plan ● Classification of magnetic materials ● Magnetic hysteresis ● Magnetometry Urbaniak Magnetization reversal in thin films and... Classification of magnetic materials All materials can be classified in terms of their magnetic behavior falling into one of several categories depending on their bulk magnetic susceptibility . ⃗ χ = M ⃗ In general the susceptibility is a position dependent tensor H In some materials the magnetization is 2 not a linear function of field strength. In 50000 such cases the differential susceptibility is introduced: 40000 ⃗ χ =d M ] χ d ⃗ m d H / 30000 1 2 A [ We usually talk about isothermal M χ 20000 1 susceptibility: ∂ ⃗ 10000 χ =( M ) T ⃗ ∂ H T 0 Theoreticians define magnetization as: 0 2 4 6 8 10 H[kA/m] ∂ ⃗ =−( F ) = − M ∂ ⃗ F E TS -Helmholtz free energy H T Urbaniak Magnetization reversal in thin films and... Classification of magnetic materials It is customary to define susceptibility in relation to volume, mass or mole (or spin): ⃗ ( ⃗ / ρ ) 3 ( ⃗ / ) 3 χ = M [ ] χ = M [ m ] χ = M mol [ m ] ⃗ dimensionless , ρ ⃗ , mol ⃗ H H kg H mol The general classification of materials according to their magnetic properties μ<1 <0 diamagnetic* μ>1 >0 paramagnetic** μ1 0 ferromagnetic*** *dia /daɪəmæɡˈnɛtɪk/ -Greek: “from, through, across” - repelled by magnets. We have from L2: 1 2 The force is directed antiparallel to the gradient of B2 F = V ∇ B i.e. -

Hysteresis Features of the Transition-Metal Dichalcogenides
Mater. Res. Express 5 (2018) 046108 https://doi.org/10.1088/2053-1591/aabca6 PAPER Hysteresis features of the transition-metal dichalcogenides VX2 RECEIVED 15 January 2018 (X=S, Se, and Te) REVISED 25 March 2018 1 1 2 ACCEPTED FOR PUBLICATION E Vatansever , S Sarikurt and R F L Evans 9 April 2018 1 Department of Physics, Dokuz Eylül University, TR-35160, Izmir-Turkey 2 PUBLISHED Department of Physics, University of York, YO10 5DD, York-United Kingdom 25 April 2018 E-mail: [email protected] Keywords: magnetic hysteresis, Monte Carlo simulation, two-dimensional materials Abstract Very recently, it has been shown that vanadium dichalcogenides (VX2,X=S, Se and Te) monolayers show intrinsic ferromagnetism, and their critical temperatures are nearly to or beyond room temperature. Hence, they would have wide potential applications in next-generation nanoelectronic and spintronic devices. In this work, being inspired by a recent study we systematically perform Monte Carlo simulations based on single-site update Metropolis algorithm to investigate the hysteresis features of VX2 monolayers for a wide range of temperatures up to 600 K. Our simulation results indicate that, both remanence and coercivity values tend to decrease with increasing temperature. Furthermore, it is found that hysteresis curves start to evolve from rectangular at the lower temperature regions to nearly S-shaped with increasing temperature. 1. Introduction In recent years, two-dimensional (2D) monolayers such as boron nitride (BN) [1], silicene [2], germanene [3], arsenene and antimonene [4], phosphorene [5] and transition metal dichalcogenides (TMDs) [6–8] have attracted considerable attention beyond graphene due to their remarkable structural, electronic, optical and magnetic properties. -

Magnetic Hysteresis
Magnetic Hysteresis The lag or delay of a magnetic material known commonly as Magnetic Hysteresis, relates to the magnetisation properties of a material by which it firstly becomes magnetised and then de- magnetised. Then the magnetic flux density in the material will be increased by a larger factor as a result of its relative permeability for the material compared to the magnetic flux density in vacuum, μoH and for an air-cored coil this relationship is given as: So for ferromagnetic materials the ratio of flux density to field strength ( B/H ) is not constant but varies with flux density. However, for air cored coils or any non- magnetic medium core such as woods or plastics, this ratio can be considered as a constant and this constant is known as μo, the permeability of free space, -7 ( μo = 4.π.10 H/m ). By plotting values of flux density, ( B ) against the field strength, ( H ) we can produce a set of curves called Magnetisation Curves, Magnetic Hysteresis Curves or more commonly B-H Curves for each type of core material used as shown below. Magnetisation or B-H Curve The set of magnetisation curves, M above represents an example of the relationship between B and H for soft-iron and steel cores but every type of core material will have its own set of magnetic hysteresis curves. You may notice that the flux density increases in proportion to the field strength until it reaches a certain value were it can not increase any more becoming almost level and constant as the field strength continues to increase. -

Semi-Hard Magnets the Important Role of Materials with Intermediate Coercivity
Semi-Hard Magnets The important role of materials with intermediate coercivity Steve Constantinides Magnetics 2011, San Antonio, TX March 1-2, 2011 Our World Touches Your World Every Day… Our World Touches Your World Every Day… © Arnold Magnetic Technologies 1 • Much of the focus of industry is on high coercivity permanent magnets and very low coercivity soft magnetic steels. • A less glamorous, but no less important set of materials provide modest coercivity for applications such as brakes and hysteresis coupled drives. • Many semi-hard materials are also malleable and therefore capable of being formed and of being machined with standard metal-working tools. • These malleable alloys can also be extruded into wire, rods and stamped into other forms. Arnold Today • Magnet Production, Vertically Integrated – SmCo (Lupfig, Switzerland, Rochester, NY) – Alnico (Marengo, IL) – Ferrite (Bonded) (Marietta, OH; Norfolk, NE) – Injection Molded (Bonded) (Shenzhen, China) • Fabricate Magnets – Slice, grind, EDM • Assemblies / Value Added Production – Precision assembly • Complex magnet and assembled shapes • Magnetized / unmagnetized assembly • High temperature and specialized adhesives – Rotor Balancing – Encapsulation / sleeving • Precision Machining Centers – Magnets and components Our World Touches Your World Every Day… © Arnold Magnetic Technologies 2 • A quick introduction to Arnold Magnetic Technologies... 2 Agenda • Definition of Semi-Hard Magnets • Material options • Applications and Examples Our World Touches Your World Every Day… © Arnold Magnetic Technologies 3 • We’ll compare properties for a number of these materials and examine some of the more common uses. Hysteresis Loops – the Layout +B Gauss (Tesla) 2nd Quadrant 1st Quadrant Measured Induction Measured -H +H Oersteds Applied Field Oersteds (A/m) (A/m) 3rd Quadrant -B 4th Quadrant Gauss (Tesla) Our World Touches Your World Every Day… © Arnold Magnetic Technologies 4 • To quantify magnetic characteristics, we apply an external field (H) and measure the effect on the material (B). -
Reverse Polarity
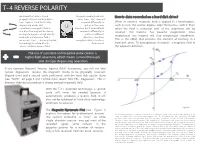
T-4 REVERSE POLARITY We know that data is stored Magnetic media (hard disk How is data recorded on a hard disk drive? magnetically on hard disk drives drive, tape, etc.) does not (see Figure 1 ) and that is why respond dierently to When an external magnetic eld is applied to a ferromagnet , degaussing works. But pulses in the same such as iron, the atomic dipoles align themselves with it. Even sometimes a magnetic eld in direction but it undoubtedly when the eld is removed, part of the alignment will be one direction may not be strong responds dierently to retained : the material has become magnetized . Once enough to degauss a high density pulses in dierent magnetized, the magnet will stay magnetized indenitely . hard disk and a reverse eld is directions (positive/ necessary. The T -4 uses patented negative), which creates a This is the eect that provides the element of memory in a technology to automatically eld spread . hard disk drive. To demagnetize it requires a magnetic eld in create a uniform reverse eld. the opposite direction . The use of a positive and negative pulse creates a higher eld saturation, which means a more thorough and stronger degaussing operation. If you examine National Security Agency (NSA) documents, you will see that certain degaussers require the magnetic media to be physically reversed (ipped over) and a second cycle performed with the hard disk upside down (see “NOTE” on page 3 and 7 of the most recent NSA EPL -Degausser) . This is because they do not produce a strong enough magnetic eld. -

An Investigation of Magnetic Hysteresis Error in Kibble Balances Shisong Li, Senior Member, IEEE, Franck Bielsa, Michael Stock, Adrien Kiss and Hao Fang
An Investigation of Magnetic Hysteresis Error in Kibble Balances Shisong Li, Senior Member, IEEE, Franck Bielsa, Michael Stock, Adrien Kiss and Hao Fang Abstract—Yoke-based permanent magnetic circuits currents (masses). Experimental measurements of Kibble are widely used in Kibble balance experiments. In these balances at the National Research Council (NRC, Canada) magnetic systems, the coil current, with positive and and the National Institute of Standards and Technology negative signs in two steps of the weighing measurement, can cause an additional magnetic flux in the circuit (NIST, USA) yielded a nonlinear current term with a few 9 and hence a magnetic field change at the coil position. parts in 10 in their systems [17], [18]. In [19], it was shown The magnetic field change due to the coil current and that the linear current effect is mainly contributed by the related systematic effects have been studied with the coil inductance change at different vertical positions, and assumption that the yoke material does not contain a significant linear magnetic profile change, proportional to any magnetic hysteresis. In this paper, we present an explanation of the magnetic hysteresis error in Kibble the coil current, has been experimentally observed. Further, balance measurements. An evaluation technique based different profile changes in weighing and velocity phases on measuring yoke minor hysteresis loops is proposed were experimentally measured in one-mode schemes [20]. to estimate the effect. The dependence of the magnetic The linear change of the magnetic profile can cause a bias hysteresis effect and some possible optimizations for when there is a coil vertical position change during two steps suppressing this effect are discussed. -

Magnetic Hysteresis
Study of magnetic hysteresis Objective: To study the magnetic hysteresis loop for a ring shaped massive iron core. Theory: Magnetism in matter: The magnetic state of a material can be described by a vector ͇⃗ called magnetization, or dipolar magnetic moment per unit volume. In vacuum, the magnetic induction ̼⃗ and the applied magnetic field intensity, ͂⃗, are connected by the equation: ̼⃗ = 0͂⃗ (1) −7 -1 where 0 = 4 ∙ 10 Hm , is the absolute magnetic permeability of vacuum. However, in a matter, magnetic induction depends on magnetization ͇⃗ in the following way: ̼⃗ = 0(͂⃗ + ͇⃗) (2) There is another important parameter called the magnetic susceptibility, , which is a measure of the quality of the magnetic material and defined as the magnetization produced per unit applied magnetic field, i.e., = M/H (3) Magnetism in solids is broadly classified into 3 categories: diamagnetism, paramagnetism and ferromagnetism. Diamagnetism: Diamagnetism is a very weak effect observed in solids having no permanent magnetic moments. It arises due to changes in the atomic orbital states induced by the applied magnetic field. It exists in all materials but usually suppressed by other stronger effects such as para- or ferromagnetism. For diamagnetic materials, magnetization ͇⃗ varies linearly with ͂⃗ in opposite direction. Hence < 0. Diamagnetism is temperature independent. Paramagnetism: Paramagnetism is also a weak effect, but unlike diamagnetism, the magnetic moment is aligned along the direction of applied magnetic field. Certain atoms and ions (oxygen, air, iron salts, etc.) have a permanent magnetic moment of their own. Without applied magnetic field, these are oriented randomly. -
What Is the Magnetic Hysteresis Loop?
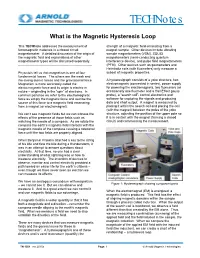
TECHNotes What is the Magnetic Hysteresis Loop This TECHNote addresses the measurement of strength of a magnetic field emanating from a ferromagnetic materials in a closed circuit magnet sample. Other devices include vibrating magnetometer. A detailed discussion of the origin of sample magnetometers (VSM), SQUID the magnetic field and explanations of other magnetometers (semi-conducting quantum magnetometer types will be discussed separately. interference device), and pulse field magnetometers -------------------------------------------------------------------- (PFM). Other devices such as gaussmeters and Helmholtz coils (with fluxmeters) only measure a Physicists tell us that magnetism is one of four subset of magnetic properties. fundamental forces. The others are the weak and the strong atomic forces and the gravitational force. A hysteresigraph consists of a yoke structure, two Magnetism is more accurately called the electromagnets (connected in series), power supply electromagnetic force and its origin is electric in for powering the electromagnets, two fluxmeters (or nature – originating in the “spin” of electrons. In occasionally one fluxmeter and a Hall Effect gauss common parlance we refer to the electromagnetic probe), a “search coil”, control electronics and force as simply the magnetic force and ascribe the software for capturing the signals and producing source of this force to a magnetic field emanating data and chart output. A magnet is measured by from a magnet (or electromagnet). placing it within the search coil and placing the coil (with the magnet) between the poles of the yoke We can’t see magnetic fields but we can witness the structure, adjusting the position of the upper pole so effects of the presence of those fields such as it is in contact with the magnet (forming a closed watching the needle of a compass.