PEAT8002 - SEISMOLOGY Lecture 16: Seismic Tomography I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Insights from the P Wave Travel Time Tomography in the Upper Mantle Beneath the Central Philippines
remote sensing Article Insights from the P Wave Travel Time Tomography in the Upper Mantle Beneath the Central Philippines Huiyan Shi 1 , Tonglin Li 1,*, Rui Sun 2, Gongbo Zhang 3, Rongzhe Zhang 1 and Xinze Kang 1 1 College of Geo-Exploration Science and Technology, Jilin University, No.938 Xi Min Zhu Street, Changchun 130026, China; [email protected] (H.S.); [email protected] (R.Z.); [email protected] (X.K.) 2 CNOOC Research Institute Co., Ltd., Beijing 100028, China; [email protected] 3 State Key Laboratory of Geodesy and Earth’s Dynamics, Innovation Academy for Precision Measurement Science and Technology, Chinese Academy of Sciences, Wuhan 430071, China; [email protected] * Correspondence: [email protected] Abstract: In this paper, we present a high resolution 3-D tomographic model of the upper mantle obtained from a large number of teleseismic travel time data from the ISC in the central Philippines. There are 2921 teleseismic events and 32,224 useful relative travel time residuals picked to compute the velocity structure in the upper mantle, which was recorded by 87 receivers and satisfied the requirements of teleseismic tomography. Crustal correction was conducted to these data before inversion. The fast-marching method (FMM) and a subspace method were adopted in the forward step and inversion step, respectively. The present tomographic model clearly images steeply subduct- ing high velocity anomalies along the Manila trench in the South China Sea (SCS), which reveals a gradual changing of the subduction angle and a gradual shallowing of the subduction depth from the north to the south. -

The East African Rift System in the Light of KRISP 90
ELSEVIER Tectonophysics 236 (1994) 465-483 The East African rift system in the light of KRISP 90 G.R. Keller a, C. Prodehl b, J. Mechie b,l, K. Fuchs b, M.A. Khan ‘, P.K.H. Maguire ‘, W.D. Mooney d, U. Achauer e, P.M. Davis f, R.P. Meyer g, L.W. Braile h, 1.0. Nyambok i, G.A. Thompson J a Department of Geological Sciences, University of Texas at El Paso, El Paso, TX 79968-0555, USA b Geophysikalisches Institut, Universitdt Karlwuhe, Hertzstrasse 16, D-76187Karlsruhe, Germany ’ Department of Geology, University of Leicester, University Road, Leicester LEl 7RH, UK d U.S. Geological Survey, Office of Earthquake Research, 345 Middlefield Road, Menlo Park, CA 94025, USA ’ Institut de Physique du Globe, Universite’ de Strasbourg, 5 Rue Ret& Descartes, F-67084 Strasbourg, France ‘Department of Earth and Space Sciences, University of California at Los Angeles, Los Angeles, CA 90024, USA ’ Department of Geology and Geophysics, University of Wuconsin at Madison, Madison, WI 53706, USA h Department of Earth and Atmospheric Sciences, Purdue University, West Lafayette, IN 47907, USA i Department of Geology, University of Nairobi, P.O. Box 14576, Nairobi, Kenya ’ Department of Geophysics, Stanford University, Stanford, CA 94305, USA Received 21 September 1992; accepted 8 November 1993 Abstract On the basis of a test experiment in 1985 (KRISP 85) an integrated seismic-refraction/ teleseismic survey (KRISP 90) was undertaken to study the deep structure beneath the Kenya rift down to depths of NO-150 km. This paper summarizes the highlights of KRISP 90 as reported in this volume and discusses their broad implications as well as the structure of the Kenya rift in the general framework of other continental rifts. -

Full-Text PDF (Final Published Version)
Pritchard, M. E., de Silva, S. L., Michelfelder, G., Zandt, G., McNutt, S. R., Gottsmann, J., West, M. E., Blundy, J., Christensen, D. H., Finnegan, N. J., Minaya, E., Sparks, R. S. J., Sunagua, M., Unsworth, M. J., Alvizuri, C., Comeau, M. J., del Potro, R., Díaz, D., Diez, M., ... Ward, K. M. (2018). Synthesis: PLUTONS: Investigating the relationship between pluton growth and volcanism in the Central Andes. Geosphere, 14(3), 954-982. https://doi.org/10.1130/GES01578.1 Publisher's PDF, also known as Version of record License (if available): CC BY-NC Link to published version (if available): 10.1130/GES01578.1 Link to publication record in Explore Bristol Research PDF-document This is the final published version of the article (version of record). It first appeared online via Geo Science World at https://doi.org/10.1130/GES01578.1 . Please refer to any applicable terms of use of the publisher. University of Bristol - Explore Bristol Research General rights This document is made available in accordance with publisher policies. Please cite only the published version using the reference above. Full terms of use are available: http://www.bristol.ac.uk/red/research-policy/pure/user-guides/ebr-terms/ Research Paper THEMED ISSUE: PLUTONS: Investigating the Relationship between Pluton Growth and Volcanism in the Central Andes GEOSPHERE Synthesis: PLUTONS: Investigating the relationship between pluton growth and volcanism in the Central Andes GEOSPHERE; v. 14, no. 3 M.E. Pritchard1,2, S.L. de Silva3, G. Michelfelder4, G. Zandt5, S.R. McNutt6, J. Gottsmann2, M.E. West7, J. Blundy2, D.H. -

Geophysical Journal International
Geophysical Journal International Geophys. J. Int. (2017) 209, 1892–1905 doi: 10.1093/gji/ggx133 Advance Access publication 2017 April 1 GJI Seismology Surface wave imaging of the weakly extended Malawi Rift from ambient-noise and teleseismic Rayleigh waves from onshore and lake-bottom seismometers N.J. Accardo,1 J.B. Gaherty,1 D.J. Shillington,1 C.J. Ebinger,2 A.A. Nyblade,3 G.J. Mbogoni,4 P.R.N. Chindandali,5 R.W. Ferdinand,6 G.D. Mulibo,6 G. Kamihanda,4 D. Keir,7,8 C. Scholz,9 K. Selway,10 J.P. O’Donnell,11 G. Tepp,12 R. Gallacher,7 K. Mtelela,6 J. Salima5 and A. Mruma4 1Lamont-Doherty Earth Observatory of Columbia University, Palisades, NY 10964, USA. E-mail: [email protected] 2Department of Earth and Environmental Sciences, Tulane University, New Orleans, LA 70118,USA 3Department of Geosciences, The Pennsylvania State University, State College, PA 16802,USA 4Geological Survey of Tanzania, Dodoma, Tanzania 5Geological Survey Department of Malawi, Zomba, Malawi 6Department of Geology, University of Dar es Salaam, Dar es Salaam, Tanzania 7National Oceanography Centre Southampton, University of Southampton, Southampton S017 1BJ, United Kingdom 8Dipartimento di Scienzedella Terra, Universita degli Studi di Firenze, Florence 50121,Italy 9Department of Earth Sciences, Syracuse University, New York, NY 13210,USA 10Department of Earth and Planetary Sciences, Macquarie University, NSW 2109, Australia 11School of Earth and Environment, University of Leeds, Leeds, LS29JT, United Kingdom 12Alaska Volcano Observatory, U.S. Geological Survey, Anchorage, AK 99775,USA Accepted 2017 March 28. Received 2017 March 13; in original form 2016 October 12 SUMMARY Located at the southernmost sector of the Western Branch of the East African Rift System, the Malawi Rift exemplifies an active, magma-poor, weakly extended continental rift. -

Seismic Tomography Shows That Upwelling Beneath Iceland Is Confined to the Upper Mantle
Geophys. J. Int. (2001) 146, 504–530 Seismic tomography shows that upwelling beneath Iceland is confined to the upper mantle G. R. Foulger,1 M. J. Pritchard,1 B. R. Julian,2 J. R. Evans,2 R. M. Allen,3 G. Nolet,3 W. J. Morgan,3 B. H. Bergsson,4 P. Erlendsson,4 S. Jakobsdottir,4 S. Ragnarsson,4 R. Stefansson4 and K. Vogfjo¨rd5 1 Department of Geological Sciences, University of Durham, Durham, DH1 3LE, UK. E-mail: [email protected] 2 US Geological Survey, 345 Middlefield Road., Menlo Park, CA 94025, USA 3 Department of Geological and Geophysical Sciences, Guyot Hall, Princeton University, Princeton, NJ 08544–5807, USA 4 Meteorological Office of Iceland, Bustadavegi 9, Reykjavik, Iceland 5 National Energy Authority, Grensasvegi 9, Reykjavik, Iceland Accepted 2001 April 3. Received 2001 March 19; in original form 2000 August 1 SUMMARY We report the results of the highest-resolution teleseismic tomography study yet performed of the upper mantle beneath Iceland. The experiment used data gathered by the Iceland Hotspot Project, which operated a 35-station network of continuously recording, digital, broad-band seismometers over all of Iceland 1996–1998. The structure of the upper mantle was determined using the ACH damped least-squares method and involved 42 stations, 3159 P-wave, and 1338 S-wave arrival times, including the phases P, pP, sP, PP, SP, PcP, PKIKP, pPKIKP, S, sS, SS, SKS and Sdiff. Artefacts, both perceptual and parametric, were minimized by well-tested smoothing techniques involving layer thinning and offset-and-averaging. Resolution is good beneath most of Iceland from y60 km depth to a maximum of y450 km depth and beneath the Tjornes Fracture Zone and near-shore parts of the Reykjanes ridge. -

Chapter 2 the Evolution of Seismic Monitoring Systems at the Hawaiian Volcano Observatory
Characteristics of Hawaiian Volcanoes Editors: Michael P. Poland, Taeko Jane Takahashi, and Claire M. Landowski U.S. Geological Survey Professional Paper 1801, 2014 Chapter 2 The Evolution of Seismic Monitoring Systems at the Hawaiian Volcano Observatory By Paul G. Okubo1, Jennifer S. Nakata1, and Robert Y. Koyanagi1 Abstract the Island of Hawai‘i. Over the past century, thousands of sci- entific reports and articles have been published in connection In the century since the Hawaiian Volcano Observatory with Hawaiian volcanism, and an extensive bibliography has (HVO) put its first seismographs into operation at the edge of accumulated, including numerous discussions of the history of Kīlauea Volcano’s summit caldera, seismic monitoring at HVO HVO and its seismic monitoring operations, as well as research (now administered by the U.S. Geological Survey [USGS]) has results. From among these references, we point to Klein and evolved considerably. The HVO seismic network extends across Koyanagi (1980), Apple (1987), Eaton (1996), and Klein and the entire Island of Hawai‘i and is complemented by stations Wright (2000) for details of the early growth of HVO’s seismic installed and operated by monitoring partners in both the USGS network. In particular, the work of Klein and Wright stands and the National Oceanic and Atmospheric Administration. The out because their compilation uses newspaper accounts and seismic data stream that is available to HVO for its monitoring other reports of the effects of historical earthquakes to extend of volcanic and seismic activity in Hawai‘i, therefore, is built Hawai‘i’s detailed seismic history to nearly a century before from hundreds of data channels from a diverse collection of instrumental monitoring began at HVO. -

Crustal Structure of the Eastern Anatolia Region (Turkey) Based on Seismic Tomography
geosciences Article Crustal Structure of the Eastern Anatolia Region (Turkey) Based on Seismic Tomography Irina Medved 1,2,* , Gulten Polat 3 and Ivan Koulakov 1 1 Trofimuk Institute of Petroleum Geology and Geophysics SB RAS, Prospekt Koptyuga, 3, 630090 Novosibirsk, Russia; [email protected] 2 Sobolev Institute of Geology and Mineralogy SB RAS, Prospekt Koptyuga, 3, 630090 Novosibirsk, Russia 3 Department of Civil Engineering, Yeditepe University, 26 Agustos Yerleskesi, 34755 Istanbul, Turkey; [email protected] * Correspondence: [email protected]; Tel.: +7-952-922-49-67 Abstract: Here, we investigated the crustal structure beneath eastern Anatolia, an area of high seismicity and critical significance for earthquake hazards in Turkey. The study was based on the local tomography method using data from earthquakes that occurred in the study area provided by the Turkiye Cumhuriyeti Ministry of Interior Disaster and Emergency Management Directorate Earthquake Department Directorate of Turkey. The dataset used for tomography included the travel times of 54,713 P-waves and 38,863 S-waves from 6355 seismic events. The distributions of the resulting seismic velocities (Vp, Vs) down to a depth of 60 km demonstrate significant anomalies associated with the major geologic and tectonic features of the region. The Arabian plate was revealed as a high-velocity anomaly, and the low-velocity patterns north of the Bitlis suture are mostly associated with eastern Anatolia. The upper crust of eastern Anatolia was associated with a ~10 km thick high-velocity anomaly; the lower crust is revealed as a wedge-shaped low-velocity anomaly. This kind of seismic structure under eastern Anatolia corresponded to the hypothesized existence of Citation: Medved, I.; Polat, G.; a lithospheric window beneath this collision zone, through which hot material of the asthenosphere Koulakov, I. -
Seismic Tomography Uses Earthquake Waves to Probe the Inner Earth CORE CONCEPTS Sid Perkins, Science Writer
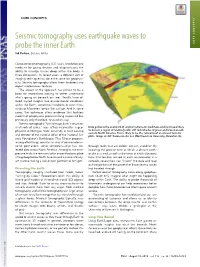
CORE CONCEPTS Seismic tomography uses earthquake waves to probe the inner Earth CORE CONCEPTS Sid Perkins, Science Writer Computerized tomography (CT) scans revolutionized medicine by giving doctors and diagnosticians the ability to visualize tissues deep within the body in three dimensions. In recent years, a different sort of imaging technique has done the same for geophysi- cists. Seismic tomography allows them to detect and depict subterranean features. The advent of the approach has proven to be a boon for researchers looking to better understand what’s going on beneath our feet. Results have of- fered myriad insights into environmental conditions within the Earth, sometimes hundreds or even thou- sands of kilometers below the surface. And in some cases, the technique offers evidence that bolsters models of geophysical processes long suspected but previously only theorized, researchers say. Seismic tomography “lets us image Earth’s structures at all sorts of scales,” says Jeffrey Freymueller, a geo- Data gathered by a network of seismic instruments (red) have enabled researchers physicist at Michigan State University in East Lansing to discern a region of relatively cold, stiff rock (shades of green and blue) beneath eastern North America. This is likely to be the remnants of an ancient tectonic and director of the national office of the National Sci- plate. Image credit: Suzan van der Lee (Northwestern University, Evanston, IL). ence Foundation’s EarthScope. That 15-year program, among other things, operates an array of seismometers— some permanent, some temporary—that has col- through rocks that are colder, denser, and drier. By lected data across North America. -

The Iceland–Jan Mayen Plume System and Its Impact on Mantle Dynamics in the North Atlantic Region: Evidence from Full-Waveform Inversion
Earth and Planetary Science Letters 367 (2013) 39–51 Contents lists available at SciVerse ScienceDirect Earth and Planetary Science Letters journal homepage: www.elsevier.com/locate/epsl The Iceland–Jan Mayen plume system and its impact on mantle dynamics in the North Atlantic region: Evidence from full-waveform inversion Florian Rickers n, Andreas Fichtner, Jeannot Trampert Department of Earth Sciences, Utrecht University, Budapestlaan 4, 3584 CD, Utrecht, The Netherlands article info abstract Article history: We present a high-resolution S-velocity model of the North Atlantic region, revealing structural Received 22 October 2012 features in unprecedented detail down to a depth of 1300 km. The model is derived using full- Received in revised form waveform tomography. More specifically, we minimise the instantaneous phase misfit between 25 January 2013 synthetic and observed body- as well as surface-waveforms iteratively in a full three-dimensional, Accepted 16 February 2013 adjoint inversion. Highlights of the model in the upper mantle include a well-resolved Mid-Atlantic Editor: Y. Ricard Ridge and two distinguishable strong low-velocity regions beneath Iceland and beneath the Kolbeinsey Ridge west of Jan Mayen. A sub-lithospheric low-velocity layer is imaged beneath much of the oceanic Keywords: lithosphere, consistent with the long-wavelength bathymetric high of the North Atlantic. The low- seismology velocity layer extends locally beneath the continental lithosphere of the southern Scandinavian full-waveform inversion Mountains, the Danish Basin, part of the British Isles and eastern Greenland. All these regions North Atlantic mantle plumes experienced post-rift uplift in Neogene times, for which the underlying mechanism is not well Iceland understood. -

Imaging the Galápagos Mantle Plume with an Unconventional Application of Floating Seismometers
Imaging the Galápagos mantle plume with an unconventional application of floating seismometers⇤ Guust Nolet1-3,*, Yann Hello1, Suzan van der Lee4, Sebastien Bonnieux1,+, Mario C. Ruiz5, Nelson A. Pazmino6, Anne Deschamps1, Marc M. Regnier1, Yvonne Font1, Yongshun J. Chen3, and Frederik J. Simons2 1Universite´ de la Coteˆ d’Azur/CNRS/OCA/IRD, Geoazur,´ Sophia Antipolis, 06560, France 2Department of Geosciences, Princeton University, Princeton, NJ 08540, USA. 3School of Ocean Science and Engineering, SUSTech, 518055 Shenzhen, China 4Department of Earth and Planetary Sciences, Northwestern University, Evanston, IL60208, USA. 5Instituto Geof´ısico, Escuela Politecnica´ Nacional, 2759 Quito, Ecuador 6INOCAR, 5940 Guayaquil, Ecuador. *[email protected] +Now at: Universite´ de la Coteˆ d’Azur/CNRS, Laboratoire i3s, 06560 Sophia Antipolis, France ABSTRACT We launched an array of nine freely floating submarine seismometers near the Galápagos islands, which remained operational for about two years. P and PKP waves from regional and teleseismic earthquakes were observed for a range of magnitudes. The signal-to-noise ratio is strongly influenced by the weather conditions and this determines the lowest magnitudes that can be observed. Waves from deep earthquakes are easier to pick, but the S/N ratio can be enhanced through filtering and the data cover earthquakes from all depths. We measured 580 arrival times for different raypaths. We show that even such a limited number of data gives a significant increase in resolution for the oceanic upper mantle. This is the first time an array of floating seismometers is used in seismic tomography to improve the resolution significantly where otherwise no seismic information is available. -

Seismic Tomography Constraints on Reconstructing
SEISMIC TOMOGRAPHY CONSTRAINTS ON RECONSTRUCTING THE PHILIPPINE SEA PLATE AND ITS MARGIN A Dissertation by LINA HANDAYANI Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY December 2004 Major Subject: Geophysics SEISMIC TOMOGRAPHY CONSTRAINTS ON RECONSTRUCTING THE PHILIPPINE SEA PLATE AND ITS MARGIN A Dissertation by LINA HANDAYANI Submitted to Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Approved as to style and content by: Thomas W. C. Hilde Mark E. Everett (Chair of Committee) (Member) Richard L. Gibson David W. Sparks (Member) (Member) William R. Bryant Richard L. Carlson (Member) (Head of Department) December 2004 Major Subject: Geophysics iii ABSTRACT Seismic Tomography Constraints on Reconstructing the Philippine Sea Plate and Its Margin. (December 2004) Lina Handayani, B.S., Institut Teknologi Bandung; M.S., Texas A&M University Chair of Advisory Committee: Dr. Thomas W.C. Hilde The Philippine Sea Plate has been surrounded by subduction zones throughout Cenozoic time due to the convergence of the Eurasian, Pacific and Indian-Australian plates. Existing Philippine Sea Plate reconstructions have been made based primarily on magnetic lineations produced by seafloor spreading, rock magnetism and geology of the Philippine Sea Plate. This dissertation employs seismic tomography model to constraint the reconstruction of the Philippine Sea Plate. Recent seismic tomography studies show the distribution of high velocity anomalies in the mantle of the Western Pacific, and that they represent subducted slabs. Using these recent tomography data, distribution maps of subducted slabs in the mantle beneath and surrounding the Philippine Sea Plate have been constructed which show that the mantle anomalies can be related to the various subduction zones bounding the Philippine Sea Plate. -

Passive Rifting of Thick Lithosphere in the Southern East African Rift
Journal of Geophysical Research: Solid Earth RESEARCH ARTICLE Passive rifting of thick lithosphere in the southern East African 10.1002/2016JB013131 Rift: Evidence from mantle transition zone Key Points: discontinuity topography • The first P-to-S receiver function study of mantle discontinuities beneath 1 1 2 3 2 the Malawi and Luangwa rifts with Cory A. Reed , Kelly H. Liu , Patrick R. N. Chindandali , Belarmino Massingue , Hassan Mdala , unprecedented spatial coverage Daniel Mutamina4, Youqiang Yu1,5, and Stephen S. Gao1 • Normal MTZ thicknesses beneath most areas, precluding thermal 1Geology and Geophysics Program, Missouri University of Science and Technology, Rolla, Missouri, USA, 2Geological upwelling as the dominant rifting 3 mechanism Survey Department, Zomba, Malawi, Departamento de Geologia, Universidade Eduardo Mondlane, Maputo, 4 5 • The central Malawi rift is developing Mozambique, Geological Survey Department, Lusaka, Zambia, State Key Laboratory of Marine Geology, Tongji in a thick and strong lithosphere, University, Shanghai, China leading to a wide rifted basin due to strain delocalization Abstract To investigate the mechanisms for the initiation and early-stage evolution of the nonvolcanic Supporting Information: southernmost segments of the East African Rift System (EARS), we installed and operated 35 broadband • Supporting Information S1 seismic stations across the Malawi and Luangwa rift zones over a 2 year period from mid-2012 to mid-2014. Stacking of over 1900 high-quality receiver functions provides the first regional-scale image of the 410 Correspondence to: and 660 km seismic discontinuities bounding the mantle transition zone (MTZ) within the vicinity of the S. S. Gao, rift zones. When a 1-D standard Earth model is used for time-depth conversion, a normal MTZ thickness of [email protected] 250 km is found beneath most of the study area.