Sûreté De Fonctionnement
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Memorandum of Understanding
Memorandum of Understanding between the member universities of the Erasmus Mundus Action 2 consortium „Capacity Building in Higher Education for an improved co-operation between the EU and SA in the field of Development Studies (EUSA_ID)”, Grant Agreement number 2013-2717/001-001 This Memorandum of Understanding is based upon the rules and regulations in place for the participation in the Erasmus Mundus Action 2/Strand 1/Lot 17 project “Capacity Building in Higher Education for an improved co-operation between the EU and SA in the field of Development Studies (EUSA_ID). Provisions contained in the document do not replace or supersede any requirements specified in these rules and regulation. The MoU establishes the terms of the agreement between the partners of the Erasmus Mundus Action2/Strand1/Lot 17 consortium EUSA_ID, defining in detail the principles, objectives, consortium activities, organization and management procedures, and the mobility activities that will be implemented within the framework of this consortium. 1. Principles of the Partnership The consortium universities hereby agree to work together towards the enhancement of the structured co-operation between European and South African Higher Education Institutions, in order to contribute to an academic and cultural exchange in education, research and other areas related to the field of Development Studies. The consortium comprises the following partners: • Ruhr University Bochum (RUB), Institute of Development Research and Development Policy (IEE) – Germany as coordinator -

1 Synth`Ese De La Carri`Ere
CURRICULUM VITAE et listes des travaux et des activit´esde Gilles DURRIEU http://web.univ-ubs.fr/lmam/durrieu/index.html - [email protected] Fran¸cais,mari´e,2 enfants. N´ele : 5 ao^ut1969 `aToulouse 1 Synth`esede la carri`ere Sp´ecialit´es: Statistique non param´etrique,Statistique robuste, Statistique s´equ- entielle, Valeurs extr^emes,Environnement, Biologie et g´en´etique,Statistique appli- qu´eeet Analyse de donn´ees. 35 articles parus ou accept´esdans des revues internationales `acomit´ede lecture (c.f. section A.1) 83 communications dont 26 invit´es dans des conf´erencesnationales et internationales (c.f. section A.3) HDR en Math´ematiques (Universit´ede Bordeaux 1) 23 septembre 2009, mention tr`esho- norable Mod´elisationStatistique de gros volume de donn´eesen environnement et g´en´etique Rapporteurs : Philippe Besse, Alain Pav´eet Fran¸coisSchmitt Jury : Philippe Besse, Alain Boudou, Antoine Gr´emare,Jean-Charles Massabuau, Alain Pav´e et Fran¸cois Schmitt Doctorat en Math´ematiquesAppliqu´ees (Universit´eBordeaux 1) 26 septembre 1997, mention tr`eshonorable Contribution statistique `al'´etudede maladie d'origine mitochondriales Directeurs : Jean-Marc Deshouillers Rapporteurs : Xavier Milhaud et Beno^ıtTruong-Van Jury : Jaromir Antoch, Jean-Marc Deshouillers, Jana Jureˇckov´a, Jean-Pierre Mazat, Xavier Milhaud, Paul Morel, Mikhail Nikouline et Beno^ıtTruong-Van DEA de Math´ematiquesAppliqu´eeset Calculs Scientifiques (Universit´eBordeaux 1) en juin 1994, mention Bien Titulaire de la Prime d'Encadrement Doctoral et de Recherche de septembre 2006 `a septembre 2010 Titulaire de la Prime d'Excellence Scientifique depuis octobre 2012 Poste actuel (depuis septembre 2010): Professeur des Universit´es`al'Universit´ede Bretagne- Sud. -

Notice Personnelle
CURRICULUM VITAE (January 2020)______________________________________________________ Aris DANIILIDIS (Athens, April 15, 1970) Department of Mathematical Engineering & Center of Mathematical Modeling University of Chile (Beauchef 851, Edificio Norte, piso 5, Santiago de Chile) E-mail: [email protected] ; [email protected] Web page: http://www.dim.uchile.cl/~arisd/ RESEARCHER ID : I-6737-2013 ORCID PROFILE: http://orcid.org/0000-0003-4837-694X RESEARCH GATE: https://www.researchgate.net/profile/Aris_Daniilidis Languages: English, French, Catalan, Spanish, Greek (written/spoken fluently) PROFESSIONAL SITUATION______________________________________________________________ since 2017 Deputy Director, Centre of Mathematical Modelling DIM-CMM UMI CNRS 2807, University of Chile, Santiago de Chile since 2013 Full Professor (Profesor Titular), Department of Mathematical Engineering DIM-CMM UMI CNRS 2807, University of Chile, Santiago de Chile 2007— 2013 Tenure Associate Professor (Professor Agregat) (on leave), Department of Mathematics, University Autonomous of Barcelona, SPAIN 2004— 2007 Tenure-track researcher (investigador Ramon y Cajal), Department of Mathematics University Autonomous of Barcelona, SPAIN Autumn 2003 Post-doctorate researcher, INRIA, Rhône-Alpes, FRANCE BIBOP Team (Non-regular Mechanics) 2002—2003 Post-doctorate researcher, Department of Economics University Autonomous of Barcelona, SPAIN 2001—2002 Post-doctorate researcher, INRIA, Rhône-Alpes, FRANCE NUMOP Team (Numerical Optimization) 2000—2001 Teaching Assistant (ATER), -

Classement CNRS Des Revues En Économie Et Gestion
Should you believe in the Shanghai ranking? Denis Bouyssou, CNRS, LAMSADE, Paris, France (joint work with J.-Ch. Billaut and Ph. Vincke) Liège, November 2009 Media OutlineOutlineOutline Outline Academic Ranking of World Universities 2009 Details of ranking methodology Some naïve comments Some comments inspired from MCDM Conclusions OutlineOutlineOutline Outline Academic Ranking of World Universities 2009 Details of ranking methodology Some naïve comments Some comments inspired from MCDM Conclusions Shanghai Ranking Jiao Tong University, Shanghai Institute of Higher Education Academic Ranking of World Universities (ARWU) 500 universities worldwide ranked annually since 2003 (2009 is the 7th edition) http://www.arwu.org/ranking.htm Top 20 World (2009) Rank Institution Country Alumni Award HiCI N&S PUB PROD Score 1 Harvard University USA 100 100 100 100 100 74,8 100 2 Stanford University USA 39 78,7 87,1 67,3 70,1 66,9 73,1 3 University of California, Berkeley USA 67,4 77,1 68,4 71,1 69 53,2 71 4 University of Cambridge UK 89,4 91,5 53,8 53,9 65,4 65,5 70,2 5 MIT USA 71 80,6 65,7 67,9 62 54,4 69,5 6 California Institute of Technology USA 51,5 69,1 57,1 66,2 47,7 100 64,8 7 Columbia University USA 70,6 67,7 55,7 49,1 69,6 46,5 61,7 8 Princeton University USA 57,8 85,2 61,6 41,5 45,7 61,4 60,2 9 University of Chicago USA 65,8 84,3 49,7 38,6 51,6 41,8 57 10 University of Oxford UK 57,6 57,9 48,9 49,8 66,1 45,7 56,3 11 Yale University USA 49,8 43,6 57,6 55,7 62,7 49,5 55,2 12 Cornell University USA 40,5 51,3 54,3 51,7 61,2 39,9 -

1 Appendix 6: Comparison of Year Abroad Partnerships with Our
Appendix 6: Comparison of year abroad partnerships with our national competitors Imperial College London’s current year abroad exchange links (data provided by Registry and reflects official exchange links for 2012-131) and their top 5 competitors’ (based on UCAS application data) exchange links are shown below. The data for competitors was confirmed either by a member of university staff (green) or obtained from their website (orange). Data was supplied/obtained between August and October 2012. Aeronautics Imperial College London France: École Centrale de Lyon, ENSICA – SupAero Germany: RWTH Aachen Singapore: National University of Singapore USA: University of California (Education Abroad Program) University of Cambridge France: École Centrale Paris Germany: Tech. University of Munich Singapore: National University of Singapore USA: Massachusetts Institute of Technology University of Oxford USA: Princeton University of Bristol Australia: University of Sydney Europe University of Southampton France: ESTACA, ENSICA – SupAero, DTUS – École Navale Brest Germany: University of Stuttgart Spain: Polytechnic University of Madrid Sweden: KTH University of Manchester Couldn’t find any evidence Bioengineering Imperial College London Australia: University of Melbourne France: Institut National Polytechnique de Grenoble Netherlands: TU Delft Singapore: National University of Singapore Switzerland: ETH Zurich USA: University of California (Education Abroad Program) University of Cambridge France: École Centrale Paris Germany: Tech. University of Munich -

Lis Full CV 2021.Pages
Curriculum Vitae Dariusz C. (Darek) Lis Educa7on 1985 – 1989 University of MassachuseEs, Amherst, Department of Physics and Astronomy, Ph. D. 1981 – 1985 University of Warsaw, Department of Physics. Professional Experience 1989 – California Ins7tute of Technology. Jet Propulsion Laboratory, Scien7st 2019 –. Research Fellow in Physics 1989 – 1992; Senior Research Fellow in Physics (Research Assistant Professor) 1992 – 1998; Senior Research Associate in Physics (Research Professor) 1998 – 2015; Deputy Director, Caltech Submillimeter Observatory 2009 – 2014; Visi7ng Associate in Physics 2015 – 2020. 2014 – 2019 Sorbonne University (Pierre and Marie Curie University), Paris Observatory (PSL University). Professor (Professeur des universités 1ère classe); Director, Laboratory for Studies of Radia7on and MaEer in Astrophysics and Atmospheres (UMR 8112). 1985 – 1989 University of MassachuseEs. Research Assistant, Five College Radio Astronomy Observatory. Visi7ng Appointments 2013 École normale supérieure. Visi7ng Professor (Professeur des universités 1ère classe invité). 2011 University of Bordeaux 1. Visi7ng Associate Professor (Maître de conférences invité). 2007 Paris Observatory. Visi7ng Senior Astronomer (Astronome invité). 2003 Max Planck Ins7tute for Radio Astronomy. Visi7ng Scien7st. 1992 – 1994 University of California, Los Angeles. Lecturer. Awards 2014 NASA Group Achievement Award, U.S. Herschel HIFI Instrument Team. 2010 NASA Group Achievement Award, Herschel HIFI Hardware Development Team. 1985 Minister of Science and Higher Learning Fellowship, Poland. Research Astrophysics and astrochemistry of the interstellar medium, star forma7on. Evolu7on of molecular complexity in astrophysical environments. Vola7le composi7on of comets and the origin of Earth’s oceans. Submillimeter heterodyne instrumenta7on. Cometary research featured on Na7onal Geographic, CBC Quirks & Quarks, and in Scien7fic American. Astrophysics Data System: 254 refereed publica7ons, 11,500 cita7ons. Books edited: Submillimeter Astrophysics and Technology: A Symposium Honoring Thomas G. -
Final Program
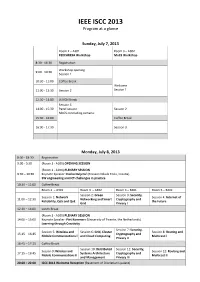
IEEE ISCC 2013 Program at a glance Sunday, July 7, 2013 Room 2 – A301 Room 3 – A302 PEDISWESA Workshop MoCS Workshop 8:30 ‐ 16:30 Registration Workshop opening 9:00 ‐ 10:30 Session 1 10:30 ‐ 11:00 Coffee Break Welcome 11:00 ‐ 12:30 Session 2 Session 1 12:30 ‐ 14:00 LUNCH Break Session 3 14:00 ‐ 15:30 Panel session Session 2 MoCS concluding remarks 15:30 ‐ 16:00 Coffee Break 16:00 ‐ 17:30 Session 3 Monday, July 8, 2013 8:00 ‐ 18:30 Registration 9:00 ‐ 9:30 (Room 1 ‐ A100) OPENING SESSION (Room 1 ‐ A100) PLENARY SESSION 9:30 – 10:30 Keynote Speaker: Darko Huljenić (Ericsson Nikola Tesla, Croatia) SW engineering and ICT challenges in practice 10:30 – 11:00 Coffee Break Room 2 – A301 Room 3 – A302 Room 4 – B401 Room 5 – B402 Session 2: Green Session 3: Security, Session 1: Network Session 4: Internet of 11:00 – 12:30 Networking and Smart Cryptography and Reliability, QoS and QoE the Future Grid Privacy I 12:30 – 14:00 Lunch Break (Room 1 ‐ A100) PLENARY SESSION 14:00 – 15:00 Keynote Speaker: Piet Kommers (University of Twente, the Netherlands) Learning through Creativity Session 7: Security, Session 5: Wireless and Session 6: Grid, Cluster Session 8: Routing and 15:15 – 16:45 Cryptography and Mobile Communications I and Cloud Computing Multicast I Privacy II 16:45 – 17:15 Coffee Break Session 10: Distributed Session 11: Security, Session 9: Wireless and Session 12: Routing and 17:15 – 18:45 Systems Architecture Cryptography and Mobile Communications II Multicast II and Management Privacy III 20:00 – 22:00 ISCC 2013 Welcome Reception (Basement -

Money & Mosquitoes
MONEY & MOSQUITOES THE ECONOMICS OF MALARIA IN AN AGE OF DECLINING AID AFRICAN DEVELOPMENT BANK POLICY RESEARCH DOCUMENT 1 Eric Maskin Harvard University Célestin Monga African Development Bank Josselin Thuilliez Centre National de la Recherche Scientifique Jean-Claude Berthélemy University of Paris 1-Panthéon-Sorbonne Eric Maskin is the Adams University Professor at Harvard University. He has made contributions to game theory, contract theory, social choice theory, political economy, and other areas of economics. He was awarded the Nobel Prize in Economics (with Leonid Hurwicz and Roger Myerson) for laying the foun- dations of mechanism design theory. After a postdoctoral fellowship at Cambridge University, he was a faculty member at the Massachusetts Institute of Technology, Harvard, and the Institute for Advanced Study at Princeton before rejoining the Harvard faculty in 2012. Célestin Monga is Vice President for Economic Governance and Knowledge Management at the African Development Bank (AfDB) Group. He previously served as Managing Director at the United Nations Industrial Development Organization, and Senior Advisor/Director for Structural Transformation at the World Bank. He has held various board and senior positions in academia and financial services, includ- ing as a pro bono member of the advisory boards at MIT's Sloan School of Management, and Visiting Professor of Economics at Boston University, the University of Bordeaux 1, the University of Paris 1-Pan- théon-Sorbonne, and Peking University. Josselin Thuilliez is Research Professor at the French national center for scientific research (CNRS) based at the Centre d'Economie de la Sorbonne (a joint research unit between CNRS and the University of Paris 1-Panthéon-Sorbonne). -

List of Participants
LIST OF PARTICIPANTS 1. ABBOU ROSA IRCCyN FRANCE 2. ABEILLE JOEL Toulouse University - Mines Albi FRANCE 3. ABLIN IL’YA InSAT RUSSIA 4. ABRAMOVA NINA Institute of Control Sciences of the RAS RUSSIA 5. ADJALLAH KONDO HLOINDO Ecole Nationale d'ingénieurs de Metz FRANCE 6. AESEN’EV DMITRY St. Petersburg State Polytechnical University RUSSIA 7. AFANASYEV VALERY MSIEM RUSSIA 8. AGGOUNE RIAD Public Research Centre Henri Tudor LUXEMBOURG 9. AGOSTINHO CARLOS UNINOVA PORTUGAL 10. AISSANI NASSIMA University of Oran ALGERIA 11. AIZIN VLADIMIR InSAT RUSSIA 12. AKHAEVA ELIZAVETA Moscow Station Open University (Politechnical Institute) RUSSIA 13. AKOPYAN MARIYA Moscow Station Open University (Politechnical Institute) RUSSIA 14. AKSENOV PAVEL Institute of Control Sciences of the RAS RUSSIA 15. AL’GINEYKIN ALEXANDER RN-INFORM RUSSIA 16. ALAOUI SELSOULI MAROUANE Ecole des Mines de Nante FRANCE 17. ALDANONDO MICHEL Toulouse University - Mines Albi FRANCE 18. ALEKSANENKOV GEORGE Moscow State Engineering Physics Institute (State University) RUSSIA 19. ALEKSEEVA EKATERINA Sobolev Institute of Mathematics RUSSIA 20. ALESKEROV FUAD Institute of Control Sciences of the RAS RUSSIA 21. ALEXANDROV ALEXANDER Institute of Control Sciences of the RAS RUSSIA 22. ALFIERI ARIANNA Politecnico di Torino ITALY 23. ALIX THECLE University of Bordeaux 1 FRANCE 24. ALLA HASSANE Université Joseph Fourier FRANCE 25. ALLAOUI HAMID University of Artois FRANCE 26. ALPATOV OLEG TekhnoMash RUSSIA 27. AMBARTSUMYAN ALEXANDER Institute of Control Sciences of the RAS RUSSIA 28. AMODEO LIONEL University of Technology of Troyes FRANCE 29. AMRANI-ZOUGGAR AICHA University of Bordeaux FRANCE 30. ANDRACHNIKOV BORIS LITOFORM RUSSIA 31. ANDREASSON SVEN-ARNE Chalmers University of Technology SWEDEN 32. ANDREEV ANDREY Bauman Moscow State Technical University RUSSIA 33. -

CURRICULUM VITAE ANDREW ABBOTT 15 April 2019 OFFICE
CURRICULUM VITAE ANDREW ABBOTT 15 April 2019 OFFICE: Department of Sociology 773 702 4545, fax 773 702 4849 University of Chicago [email protected] 1126 E. 59th St. Chicago IL 60637 EDUCATION: Ph.D. University of Chicago 1982 (sociology) M.A. University of Chicago 1975 (sociology) B.A. Harvard University 1970 (history and literature) PRESENT POSITION: 2001- Gustavus F. and Ann M. Swift Distinguished Service Professor, Department of Sociology and the College, University of Chicago PRIOR POSITIONS: 2005-2018 Senior Fellow, Computation Institute, Argonne National Laboratory/ University of Chicago 1997-2000 Ralph Lewis Professor, Department of Sociology and the College, University of Chicago 1991-1997 Professor, Department of Sociology and the College, University of Chicago 1978-1991 Instructor to Associate Professor (1986), Rutgers University, Department of Sociology 1973-1978 Research and Evaluation Department Manteno State Hospital, Manteno, Illinois & Illinois Department of Mental Health 1967-1971 Research Assistant, Harvard University Center for Population Studies, Professor Roger Revelle ADMINISTRATIVE POSITIONS: 2008-2010 Summer Acting Chair, Department of Sociology, University of Chicago 1999-2002 Chair, Department of Sociology University of Chicago 1993-1996 Master, Social Sciences Collegiate Division Deputy Dean, Division of Social Sciences Associate Dean of the College University of Chicago PUBLICATION: BOOKS: The System of Professions: An Essay on the Division of Expert Labor University of Chicago Press. xvi+435pp. 1988. Winner, ASA Distinguished Scholarly Publication Award, 1991. Chinese translation, Commercial Press, 2016. Department and Discipline: Chicago Sociology at 100 University of Chicago Press, xii+249pp. 1999. Japanese translation, 2011. Translation into Chinese (forthcoming, April 2019) Chaos of Disciplines University of Chicago Press, xvi+252pp. -

CELIA - Centre Lasers Intenses Et Applications Rapport Hcéres
CELIA - Centre lasers intenses et applications Rapport Hcéres To cite this version: Rapport d’évaluation d’une entité de recherche. CELIA - Centre lasers intenses et applications. 2010, Université Bordeaux 1 sciences et technologies, Commissariat à l’énergie atomique et aux énergies alternatives - CEA. hceres-02033610 HAL Id: hceres-02033610 https://hal-hceres.archives-ouvertes.fr/hceres-02033610 Submitted on 20 Feb 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Section des Unités de recherche AERES report on the research unit Centre Lasers Intenses et Applications (CELIA) – UMR 5107 From the Université Bordeaux 1 CNRS CEA/DSM May 2010 Section des Unités de recherche Rapport de l’AERES sur l’unité : Centre Lasers Intenses et Applications (CELIA) – UMR 5107 Sous tutelle des établissements et organismes Université Bordeaux 1 CNRS CEA/DSM Mai 2010 Research Unit Name of the research unit: Centre Lasers Intenses et Applications, CELIA Requested label: UMR N° in the case of renewal: 5107 Name of the director: Mr Philippe BALCOU Members of the review -

Our Reference: JQI 6008
Our reference: JQI 6008 Jacques Jaubert, Dominique Genty, Hélène Valladas, Patrice Courtaud, Catherine Ferrier, Valérie Feruglio, Nathalie Fourment, Stéphane Konik, Sébastien Villotte, Camille Bourdier, et al. To cite this version: Jacques Jaubert, Dominique Genty, Hélène Valladas, Patrice Courtaud, Catherine Ferrier, et al.. Our reference: JQI 6008. Quaternary International, Elsevier, 2017, 432, pp.5-24. 10.1016/j.quaint.2016.01.052. hal-02009528 HAL Id: hal-02009528 https://hal.archives-ouvertes.fr/hal-02009528 Submitted on 19 Feb 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Our reference: JQI 6008 P-authorquery-v9 AUTHOR QUERY FORM Journal: JQI Please e-mail your responses and any corrections to: E-mail: [email protected] Article Number: 6008 Dear Author, Please check your proof carefully and mark all corrections at the appropriate place in the proof (e.g., by using on-screen annotation in the PDF file) or compile them in a separate list. Note: if you opt to annotate the file with software other than Adobe Reader then please also highlight the appropriate place in the PDF file. To ensure fast publication of your paper please return your corrections within 48 hours.