Improved Sound Speed Control Through Remotely Detecting Strong Changes in the Thermocline
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intracratonic Asthenosphere Upwelling and Lithosphere Rejuvenation
Earth and Planetary Science Letters 260 (2007) 482–494 www.elsevier.com/locate/epsl Intracratonic asthenosphere upwelling and lithosphere rejuvenation beneath the Hoggar swell (Algeria): Evidence from HIMU metasomatised lherzolite mantle xenoliths ⁎ L. Beccaluva a, , A. Azzouni-Sekkal b, A. Benhallou c, G. Bianchini a, R.M. Ellam d, M. Marzola a, F. Siena a, F.M. Stuart d a Dipartimento di Scienze della Terra, Università di Ferrara, Italy b Faculté des Sciences de la Terre, Géographie et Aménagement du Territoire, Université des Sciences et Technologie Houari Boumédienne, Alger, Algeria c CRAAG (Centre de Recherche en Astronomie, Astrophysique et Géophysique), Alger, Algeria d Isotope Geoscience Unit, Scottish Universities Environmental Research Centre, East Kilbride, UK Received 7 March 2007; received in revised form 23 May 2007; accepted 24 May 2007 Available online 2 June 2007 Editor: R.W. Carlson Abstract The mantle xenoliths included in Quaternary alkaline volcanics from the Manzaz-district (Central Hoggar) are proto-granular, anhydrous spinel lherzolites. Major and trace element analyses on bulk rocks and constituent mineral phases show that the primary compositions are widely overprinted by metasomatic processes. Trace element modelling of the metasomatised clinopyroxenes allows the inference that the metasomatic agents that enriched the lithospheric mantle were highly alkaline carbonate-rich melts such as nephelinites/melilitites (or as extreme silico-carbonatites). These metasomatic agents were characterized by a clear HIMU Sr–Nd–Pb isotopic signature, whereas there is no evidence of EM1 components recorded by the Hoggar Oligocene tholeiitic basalts. This can be interpreted as being due to replacement of the older cratonic lithospheric mantle, from which tholeiites generated, by asthenospheric upwelling dominated by the presence of an HIMU signature. -

Global Ship Accidents and Ocean Swell-Related Sea States
Nat. Hazards Earth Syst. Sci. Discuss., doi:10.5194/nhess-2017-142, 2017 Manuscript under review for journal Nat. Hazards Earth Syst. Sci. Discussion started: 26 April 2017 c Author(s) 2017. CC-BY 3.0 License. Global ship accidents and ocean swell-related sea states Zhiwei Zhang1, 2, Xiao-Ming Li2, 3 1 College of Geography and Environment, Shandong Normal University, Jinan, China 2 Key Laboratory of Digital Earth Science, Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, 5 Beijing, China 3 Hainan Key Laboratory of Earth Observation, Sanya, China Correspondence to: X.-M. Li (E-mail: [email protected]) Abstract. With the increased frequency of shipping activities, navigation safety has become a major concern, especially when economic losses, human casualties and environmental issues are considered. As a contributing factor, sea state conditions play 10 a significant role in shipping safety. However, the types of dangerous sea states that trigger serious shipping accidents are not well understood. To address this issue, we analyzed the sea state characteristics during ship accidents that occurred in poor weather or heavy seas based on a ten-year ship accident dataset. The sea state parameters, including the significant wave height, the mean wave period and the mean wave direction, obtained from numerical wave model data were analyzed for selected ship accidents. The results indicated that complex sea states with the co-occurrence of wind sea and swell conditions represent 15 threats to sailing vessels, especially when these conditions include close wave periods and oblique wave directions. 1 Introduction The shipping industry delivers 90% of all world trade (IMO, 2011). -

A Numerical Study of the Long- and Short-Term Temperature Variability and Thermal Circulation in the North Sea
JANUARY 2003 LUYTEN ET AL. 37 A Numerical Study of the Long- and Short-Term Temperature Variability and Thermal Circulation in the North Sea PATRICK J. LUYTEN Management Unit of the Mathematical Models, Brussels, Belgium JOHN E. JONES AND ROGER PROCTOR Proudman Oceanographic Laboratory, Bidston, United Kingdom (Manuscript received 3 January 2001, in ®nal form 4 April 2002) ABSTRACT A three-dimensional numerical study is presented of the seasonal, semimonthly, and tidal-inertial cycles of temperature and density-driven circulation within the North Sea. The simulations are conducted using realistic forcing data and are compared with the 1989 data of the North Sea Project. Sensitivity experiments are performed to test the physical and numerical impact of the heat ¯ux parameterizations, turbulence scheme, and advective transport. Parameterizations of the surface ¯uxes with the Monin±Obukhov similarity theory provide a relaxation mechanism and can partially explain the previously obtained overestimate of the depth mean temperatures in summer. Temperature strati®cation and thermocline depth are reasonably predicted using a variant of the Mellor±Yamada turbulence closure with limiting conditions for turbulence variables. The results question the common view to adopt a tuned background scheme for internal wave mixing. Two mechanisms are discussed that describe the feedback of the turbulence scheme on the surface forcing and the baroclinic circulation, generated at the tidal mixing fronts. First, an increased vertical mixing increases the depth mean temperature in summer through the surface heat ¯ux, with a restoring mechanism acting during autumn. Second, the magnitude and horizontal shear of the density ¯ow are reduced in response to a higher mixing rate. -

World Ocean Thermocline Weakening and Isothermal Layer Warming
applied sciences Article World Ocean Thermocline Weakening and Isothermal Layer Warming Peter C. Chu * and Chenwu Fan Naval Ocean Analysis and Prediction Laboratory, Department of Oceanography, Naval Postgraduate School, Monterey, CA 93943, USA; [email protected] * Correspondence: [email protected]; Tel.: +1-831-656-3688 Received: 30 September 2020; Accepted: 13 November 2020; Published: 19 November 2020 Abstract: This paper identifies world thermocline weakening and provides an improved estimate of upper ocean warming through replacement of the upper layer with the fixed depth range by the isothermal layer, because the upper ocean isothermal layer (as a whole) exchanges heat with the atmosphere and the deep layer. Thermocline gradient, heat flux across the air–ocean interface, and horizontal heat advection determine the heat stored in the isothermal layer. Among the three processes, the effect of the thermocline gradient clearly shows up when we use the isothermal layer heat content, but it is otherwise when we use the heat content with the fixed depth ranges such as 0–300 m, 0–400 m, 0–700 m, 0–750 m, and 0–2000 m. A strong thermocline gradient exhibits the downward heat transfer from the isothermal layer (non-polar regions), makes the isothermal layer thin, and causes less heat to be stored in it. On the other hand, a weak thermocline gradient makes the isothermal layer thick, and causes more heat to be stored in it. In addition, the uncertainty in estimating upper ocean heat content and warming trends using uncertain fixed depth ranges (0–300 m, 0–400 m, 0–700 m, 0–750 m, or 0–2000 m) will be eliminated by using the isothermal layer. -

Waves and Weather
Waves and Weather 1. Where do waves come from? 2. What storms produce good surfing waves? 3. Where do these storms frequently form? 4. Where are the good areas for receiving swells? Where do waves come from? ==> Wind! Any two fluids (with different density) moving at different speeds can produce waves. In our case, air is one fluid and the water is the other. • Start with perfectly glassy conditions (no waves) and no wind. • As wind starts, will first get very small capillary waves (ripples). • Once ripples form, now wind can push against the surface and waves can grow faster. Within Wave Source Region: - all wavelengths and heights mixed together - looks like washing machine ("Victory at Sea") But this is what we want our surfing waves to look like: How do we get from this To this ???? DISPERSION !! In deep water, wave speed (celerity) c= gT/2π Long period waves travel faster. Short period waves travel slower Waves begin to separate as they move away from generation area ===> This is Dispersion How Big Will the Waves Get? Height and Period of waves depends primarily on: - Wind speed - Duration (how long the wind blows over the waves) - Fetch (distance that wind blows over the waves) "SMB" Tables How Big Will the Waves Get? Assume Duration = 24 hours Fetch Length = 500 miles Significant Significant Wind Speed Wave Height Wave Period 10 mph 2 ft 3.5 sec 20 mph 6 ft 5.5 sec 30 mph 12 ft 7.5 sec 40 mph 19 ft 10.0 sec 50 mph 27 ft 11.5 sec 60 mph 35 ft 13.0 sec Wave height will decay as waves move away from source region!!! Map of Mean Wind -

Shear Dispersion in the Thermocline and the Saline Intrusion$
Continental Shelf Research ] (]]]]) ]]]–]]] Contents lists available at SciVerse ScienceDirect Continental Shelf Research journal homepage: www.elsevier.com/locate/csr Research papers Shear dispersion in the thermocline and the saline intrusion$ Hsien-Wang Ou a,n, Xiaorui Guan b, Dake Chen c,d a Division of Ocean and Climate Physics, Lamont-Doherty Earth Observatory, Columbia University, 61 Rt. 9W, Palisades, NY 10964, United States b Consultancy Division, Fugro GEOS, 6100 Hillcroft, Houston, TX 77081, United States c Lamont-Doherty Earth Observatory, Columbia University, United States d State Key Laboratory of Satellite Ocean Environment Dynamics, Hangzhou, China article info abstract Article history: Over the mid-Atlantic shelf of the North America, there is a pronounced shoreward intrusion of the Received 11 March 2011 saltier slope water along the seasonal thermocline, whose genesis remains unexplained. Taking note of Received in revised form the observed broad-band baroclinic motion, we postulate that it may propel the saline intrusion via the 15 March 2012 shear dispersion. Through an analytical model, we first examine the shear-induced isopycnal diffusivity Accepted 19 March 2012 (‘‘shear diffusivity’’ for short) associated with the monochromatic forcing, which underscores its varied even anti-diffusive short-term behavior and the ineffectiveness of the internal tides in driving the shear Keywords: dispersion. We then derive the spectral representation of the long-term ‘‘canonical’’ shear diffusivity, Saline intrusion which is found to be the baroclinic power band-passed by a diffusivity window in the log-frequency Shear dispersion space. Since the baroclinic power spectrum typically plateaus in the low-frequency band spanned by Lateral diffusion the diffusivity window, canonical shear diffusivity is simply 1/8 of this low-frequency plateau — Isopycnal diffusivity Tracer dispersion independent of the uncertain diapycnal diffusivity. -

The Sound Channel Characteristics in the South Central Bay of Bengal
International Journal of Innovative Technology and Exploring Engineering (IJITEE ) ISSN: 2278-3075, Volume-3 Issue-6, November 2013 The Sound Channel Characteristics in the South Central Bay of Bengal P.V. Hareesh Kumar At deeper levels, the sound speed increases with depth, as Abstract - Environmental data collected along 92.5oE between the hydrostatic pressure increases and temperature variation o o 2.7 N and 12.77 N during late winter show a permanent sound is not significant. This "channeling" of sound occurs because velocity maximum around 75 m and an intermediate minimum of the presence of a minimum in the vertical sound speed between 1350 m and 1750 m. The axis of the deep sound channel profile. The axis of the channel is defined as the depth where is noticed around 1700 m. The shallower axial depth (~1350 m) between 7.5oN and 10.5oN coincides with the cyclonic eddy. the minimum sound speed occurs in the profile. The Within the sonic layer (SLD), Eastern Dilute Water of subsurface duct centered on the axis of the channel is known Indo-Pacific origin and Bay of Bengal Watermass are present as the SOFAR channel. Critical (limiting) depth is that depth whereas its bottom coincides with the Arabian Sea Watermass. where the sound velocity is equal to the maximum sound Sound speed gradient shows good relationship with temperature velocity at the surface or in the surface mixed layer. Sound gradient (correlation coefficient of 0.87) than with salinity from a source within the channel gets trapped by refraction gradient. A critical frequency of 500 Hz is required for the signal and travels over long ranges with little loss. -

Ray Trace Modeling of Underwater Sound Propagation
Chapter 23 Ray Trace Modeling of Underwater Sound Propagation Jens M. Hovem Additional information is available at the end of the chapter http://dx.doi.org/10.5772/55935 1. Introduction Modeling acoustic propagation conditions is an important issue in underwater acoustics and there exist several mathematical/numerical models based on different approaches. Some of the most used approaches are based on ray theory, modal expansion and wave number integration techniques. Ray acoustics and ray tracing techniques are the most intuitive and often the simplest means for modeling sound propagation in the sea. Ray acoustics is based on the assumption that sound propagates along rays that are normal to wave fronts, the surfaces of constant phase of the acoustic waves. When generated from a point source in a medium with constant sound speed, the wave fronts form surfaces that are concentric circles, and the sound follows straight line paths that radiate out from the sound source. If the speed of sound is not constant, the rays follow curved paths rather than straight ones. The computational technique known as ray tracing is a method used to calculate the trajectories of the ray paths of sound from the source. Ray theory is derived from the wave equation when some simplifying assumptions are introduced and the method is essentially a high-frequency approximation. The method is sufficiently accurate for applications involving echo sounders, sonar, and communications systems for short and medium short distances. These devices normally use frequencies that satisfy the high frequency conditions. This article demonstrates that ray theory also can be successfully applied for much lower frequencies approaching the regime of seismic frequencies. -

OCEANS ´09 IEEE Bremen
11-14 May Bremen Germany Final Program OCEANS ´09 IEEE Bremen Balancing technology with future needs May 11th – 14th 2009 in Bremen, Germany Contents Welcome from the General Chair 2 Welcome 3 Useful Adresses & Phone Numbers 4 Conference Information 6 Social Events 9 Tourism Information 10 Plenary Session 12 Tutorials 15 Technical Program 24 Student Poster Program 54 Exhibitor Booth List 57 Exhibitor Profiles 63 Exhibit Floor Plan 94 Congress Center Bremen 96 OCEANS ´09 IEEE Bremen 1 Welcome from the General Chair WELCOME FROM THE GENERAL CHAIR In the Earth system the ocean plays an important role through its intensive interactions with the atmosphere, cryo- sphere, lithosphere, and biosphere. Energy and material are continually exchanged at the interfaces between water and air, ice, rocks, and sediments. In addition to the physical and chemical processes, biological processes play a significant role. Vast areas of the ocean remain unexplored. Investigation of the surface ocean is carried out by satellites. All other observations and measurements have to be carried out in-situ using research vessels and spe- cial instruments. Ocean observation requires the use of special technologies such as remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), towed camera systems etc. Seismic methods provide the foundation for mapping the bottom topography and sedimentary structures. We cordially welcome you to the international OCEANS ’09 conference and exhibition, to the world’s leading conference and exhibition in ocean science, engineering, technology and management. OCEANS conferences have become one of the largest professional meetings and expositions devoted to ocean sciences, technology, policy, engineering and education. -
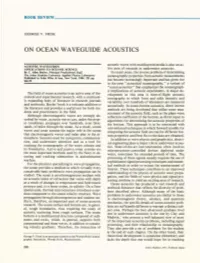
On Ocean Waveguide Acoustics
BOOKREVIEW ___________________________________________________ GEORGE V. FRISK ON OCEAN WAVEGUIDE ACOUSTICS acoustic waves with multilayered media is also an ac ACOUSTIC WAVEGUIDES: APPLICATIONS TO OCEANIC SCIENCE tive area of research in underwater acoustics. By C. Allen Boyles, Principal Professional Staff, In recent years, the inverse problem of determining The Johns Hopkins University Applied Physics Laboratory oceanographic properties from acoustic measurements Published by John Wiley & Son, New York, 1984. 321 pp. $46.95 has become increasingly important and has given rise to the term "acoustical oceanography," a variant of "ocean acoustics" that emphasizes the oceanograph ic implications of acoustic experiments. A major de The field of ocean acoustics is an active area of the velopment in this area is time-of-flight acoustic oretical and experimental research, with a continual tomography in which front and eddy intensity and ly expanding body of literature in research journals variability over hundreds of kilometers are measured and textbooks. Boyles' book is a welcome addition to acoustically. In ocean-bottom acoustics, direct inverse the literature and provides a useful text for both stu methods are being developed that utilize some mea dents and practitioners in the field. surement of the acoustic field, such as the plane wave Although electromagnetic waves are strongly ab reflection coefficient of the bottom, as direct input to sorbed by water, acoustic waves can, under the prop algorithms for determining the acoustic properties of er conditions, propagate over hundreds, even thou the bottom. This approach is to be contrasted with sands, of miles through the ocean. As a result, sound conventional techniques in which forward models for waves and sonar assume the major role in the ocean computing the acoustic field are run for different bot that electromagnetic waves and radar play in the at tom properties until best fits to the data are obtained. -

Proceedings: Twentieth Annual Gulf of Mexico Information Transfer Meeting
OCS Study MMS 2001-082 Proceedings: Twentieth Annual Gulf of Mexico Information Transfer Meeting December 2000 U.S. Department of the Interior Minerals Management Service Gulf of Mexico OCS Region OCS Study MMS 2001-082 Proceedings: Twentieth Annual Gulf of Mexico Information Transfer Meeting December 2000 Editors Melanie McKay Copy Editor Judith Nides Production Editor Debra Vigil Editor Prepared under MMS Contract 1435-00-01-CA-31060 by University of New Orleans Office of Conference Services New Orleans, Louisiana 70814 Published by New Orleans U.S. Department of the Interior Minerals Management Service October 2001 Gulf of Mexico OCS Region iii DISCLAIMER This report was prepared under contract between the Minerals Management Service (MMS) and the University of New Orleans, Office of Conference Services. This report has been technically reviewed by the MMS and approved for publication. Approval does not signify that contents necessarily reflect the views and policies of the Service, nor does mention of trade names or commercial products constitute endorsement or recommendation for use. It is, however, exempt from review and compliance with MMS editorial standards. REPORT AVAILABILITY Extra copies of this report may be obtained from the Public Information Office (Mail Stop 5034) at the following address: U.S. Department of the Interior Minerals Management Service Gulf of Mexico OCS Region Public Information Office (MS 5034) 1201 Elmwood Park Boulevard New Orleans, Louisiana 70123-2394 Telephone Numbers: (504) 736-2519 1-800-200-GULF CITATION This study should be cited as: McKay, M., J. Nides, and D. Vigil, eds. 2001. Proceedings: Twentieth annual Gulf of Mexico information transfer meeting, December 2000. -
I. Wind-Driven Coastal Dynamics II. Estuarine Processes
I. Wind-driven Coastal Dynamics Emily Shroyer, Oregon State University II. Estuarine Processes Andrew Lucas, Scripps Institution of Oceanography Variability in the Ocean Sea Surface Temperature from NASA’s Aqua Satellite (AMSR-E) 10000 km 100 km 1000 km 100 km www.visibleearth.nasa.Gov Variability in the Ocean Sea Surface Temperature (MODIS) <10 km 50 km 500 km Variability in the Ocean Sea Surface Temperature (Field Infrared Imagery) 150 m 150 m ~30 m Relevant spatial scales range many orders of magnitude from ~10000 km to submeter and smaller Plant DischarGe, Ocean ImaginG LanGmuir and Internal Waves, NRL > 1000 yrs ©Dudley Chelton < 1 sec < 1 mm > 10000 km What does a physical oceanographer want to know in order to understand ocean processes? From Merriam-Webster Fluid (noun) : a substance (as a liquid or gas) tending to flow or conform to the outline of its container need to describe both the mass and volume when dealing with fluids Enterà density (ρ) = mass per unit volume = M/V Salinity, Temperature, & Pressure Surface Salinity: Precipitation & Evaporation JPL/NASA Where precipitation exceeds evaporation and river input is low, salinity is increased and vice versa. Note: coastal variations are not evident on this coarse scale map. Surface Temperature- Net warming at low latitudes and cooling at high latitudes. à Need Transport Sea Surface Temperature from NASA’s Aqua Satellite (AMSR-E) www.visibleearth.nasa.Gov Perpetual Ocean hWp://svs.Gsfc.nasa.Gov/cGi-bin/details.cGi?aid=3827 Es_manG the Circulaon and Climate of the Ocean- Dimitris Menemenlis What happens when the wind blows on Coastal Circulaon the surface of the ocean??? 1.