Development and Demonstration of Control Strategies for a Common Rail Direct Injection Armoured Fighting Vehicle Engine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fdsjgfd Not Imitators!
PERFORMANCE INNOVATORS FDSJGFD NOT IMITATORS! CPC TURBO M8 HANDBOOK USING GARRET TURBO FOR PROCLIMB / PROCROSS 800 Stage 2 CUTLER’S PERFORMANCE CENTER “PERFORMANCE INNOVATORS NOT IMMITATORS” CPC Turbo M8 Handbook Using Garrett Turbo For Pro Climb and Pro Cross 800’s Thank you for purchasing a CPC Pro Climb and Pro Cross Turbo Kit. Our kits are built to the highest quality standards. This handbook contains both generic and specific information regarding turbo operation and installation. This handbook also contains valuable information that will help you understand how your turbo works and how to tune your turbo powered Arctic Cat to get the most performance out of this product as well as ways to avoid potential problems and save money. CPC has been turbo charging snowmobiles since the mid 1990's with a 1993 EXT 550 model as our first project. Two years later we completed a more reliable turbo charged ZR 580 with great success. As the years followed, the Turbo kits continue to be refined. What kind of Turbo does CPC use and why? CPC uses a GT Garrett RS series ball bearing turbo. Garrett turbos have passed intensive testing for durability, safety and efficiency. Garrett GT series turbos have a higher efficiency rating which reduces heat and produces more pounds of air per minute than many other turbo manufactures. What kind of maintenance and care is required for the Garrett RS series turbo? We recommend that you use Mobile 1 synthetic 5 w 30 oil or other high quality synthetic oils. Use 0 w 30 if temps drop below -20 F. -
EVC 7 Manual 01 Outline 2020 02 27
£ 10)1\f-£00917 WI-£ ·,al\ Y�Ef'Z 1fOZOZ 00-00Z00)1-IU903 The 7th generation 0 --ffe.J..[1t�=1�==-t'J=l?}t/�'M':::lc 'c;\-::;,-::?,1t'.,t�,q(f::J cp !:!::(�.=' 0 , 1�?-t>!:J::(¥:.=-J., 1�::J11fco �ti� '�JF-tc.t-1::J-fi'�f,f�J:I:� 0 , 1�?./-)J..Ct'1-::1-r--e�f-;fj..�::J4!!&�.--fl t[{_ 4!!+1-MllJr 0 �- , 1�?./-)J..11*�}::J���J�j..� "fl+J.µ.}21Jr ELECJRON/C VALVE CONJROLLER Instruction anual Product EVC7 Use Boost Controller- Automotive Turbocharged Engine Application Vehicle that operates on a DC 12V negative ground. Part No. 45003-AK013 · A fuel-ignition Correction device (e.g. HKS F-CON etc) is required in order to use this product. • Hose set is required in order to install this product to a vehicle with poppet valve, twin turbo engine, or 4mm hose piping. Remarks Hose set is available separately. ·When you increase the boost, some vehicles will have a fuel cut. When the fuel cut is released, be sure to use the fuel increase device together. H3110HLNO:J 3A1VA :JINOHL:J313 Installation should be performed by a professional. Prior to installation and use, thoroughly read the instruction manual. Retain this instruction manual for later reference. E05121 K00200-00 February, 2020 Ver. 3-1.01 45003-AK0l 3 Introduction E fO)l\f-EOOSI> HKS EVC7 Read this instruction manual prior to installation to ensure safe and correct usage and optimal product performance, The HKS EVC7 enables the adjustment of the boost setting from inside the vehicle. -

G-Force2 Instuctions
GFB Electronic boost controller instruction manual MENU SCRAMBLE BOOST Go Fast Bits P/L Ph: +61 (0)2 9534 0099 P.O. Box 1017 Fax: +61 (0)2 9534 3999 Riverwood NSW 2210 Email: [email protected] Australia Web: www.gfb.com.au contents Intro About the G-Force II 2 Installation Wiring Diagram 3 Solenoid Valve Installation Diagram 4 Menu Navigation Menu Structure 5 Boost Presets 6 Setting the Boost Pressure Duty Cycle 7 Gain 8 Sensitivity 9 Controller Functions Scramble Boost 10 Overboost 11 Peak Hold 11 Display Setting - Units of Pressure 12 Input Setup 12 Colour Settings 13 Additional Info Tips 14 Troubleshooting 15 Tech 16 Warranty 16 about the g force ii The GFB G-Force II boost controller is designed to bring on boost as fast and accurately as possible on a turbocharged vehicle. It incorporates an advanced and unique boost control strategy that allows the user fine control over the peak boost, rise rate, and closed-loop correction. The G-Force II also features a new user interface, making menu navigation and setup as fast and simple as possible. Features at a glance: ?6 individually programmable boost preset memories, selectable on-the-fly ?Closed-loop correction - helps prevent boost variations ?New scramble boost strategy - increase or decrease boost for a certain amount of time at the push of a button ?Overboost protection - shuts down the solenoid and flashes a warning if boost goes too high ?Peak hold display ?Real-time boost/vacuum gauge display - in BAR, kPa, or PSI ?External input - can be used to activate scramble or select boost memories remotely ?Adjustable button colours - tie in with the car’s existing lighting 91.5mm Installing the Head Unit The G-Force II casing is a ½ DIN size, allowing to be MENU mounted into one half of a standard stereo slot. -

Grimmspeed 3 Port Boost Control Solenoid Installation Instructions 2002+ Subaru WRX/Sti/LGT/FXT
GrimmSpeed 3 Port Boost Control Solenoid Installation Instructions 2002+ Subaru WRX/STi/LGT/FXT ***Image above is a generic photo, your EBCS may look different*** All GrimmSpeed products are intended for Off-Road use only. Park your vehicle on a level surface. Fully engage the parking brake and put wheel stops on the front and rear wheels to keep the vehicle from rolling. Warning (read before installing): Before moving forward with the setups outlined below, insure that you have the experience and confidence to properly tune your car. If not, please consult a tuning professional. Without a proper tune you can overboost and damage your engine. Under no circumstances is the GrimmSpeed Solenoid to be used in any applications where failure of the valve to operate as intended could jeopardize the safety of the operator or any other person or property. Note! You must tune for this hardware! Using stock or off-the-shelf EM with a 3-port solenoid installed in interrupt mode will result in overboosting! A. Purpose The benefits of this upgrade are faster spool, ability to hold higher boost, and better control over boost. A side benefit of the improved boost control is the ability to reach higher target boost levels in the low (1st and 2nd) gears. Grimmspeed 1 B. Technical Background A BCS is a binary device – i.e. it is either on (energized), or off. In the context of the Subaru device, when the BCS is energized, air is allowed to pass through the device, while when it is off, the air flow is cut. -

Re-Engineering a 2007 Yamaha Phazer for the Clean Snowmobile Challenge 2009 Northern Illinois University
Re-Engineering a 2007 Yamaha Phazer for The Clean Snowmobile Challenge 2009 Northern Illinois University Mark Baumhardt, Matt Davis, Nick Diorio, Luke Gidcumb, Mike Guinta, Jarred Hopkinson, Mason Long, Mike Mautsky, Ben Nichols, Tim Olson, Matt Potts, Wayne Richards, Nolan Scanlan, Drew Scott, Kurt Steinkamp, Andrew Timmerman, Blake VerStraete, Andrew Woodlief SAE Clean Snowmobile Team Members Dr. Federico Sciammarella Department of Mechanical Engineering ____________________________________________________________________________________ Abstract The snowmobile will be tested for improved A 2007 Yamaha Phazer has been chosen to exhaust emissions and reduction of noise as well be re-engineered to compete in the Clean as events that will challenge the snowmobile in a Snowmobile Challenge 2009. The objectives of the variety of customs. The events will take place over competition were to modify a snowmobile to a period of six days; testing fuel economy, increase its performance while lowering it’s exhaust marketability, and overall performance of the and noise emissions. Each snowmobile will be snowmobile [2]. tested and analyzed against the EPA 2012 emission standards. The design will also take rider Team History comfort, cost effectiveness, and costumer appeal The SAE Clean Snowmobile Team at into consideration. The stock Yamaha engine Northern Illinois University is currently in its second management computer was replaced with a custom year. The program started in the hands of four tuned unit in order to accommodate the rules for mechanical engineering students as a senior the 2009 competition. The exhaust system was design project. The initial idea was to convert a modified by adding a catalytic converter and a turbo snowmobile engine to run on E85, lowering its for increased performance and efficiency. -
Instruction Manual
HK S E L E C TR ONIC S TE C HNOL OG Y Instruction Manual Installation should be performed by a professional. Prior to installation and use, thoroughly read the instruction manual. Retain this instruction manual for later reference. 45003-AK005 HKS USA Inc Ver.111506 Introduction HKS EVC Read this instruction manual prior to installation to ensure safe and correct usage and optimal product performance, Product EVC Use Boost Controller- Automotive Turbocharged Engine Application Vehicle that operates on a DC 12V negative ground. Part No. 45003-AK005 ・A fuel controller (e.g. F-CON, AIC, etc) may be needed when raising boost pressure with the EVC Boost Controller. Remarks ・Some vehicles have a fuel cut function when boost is raised. To bypass the fuel cut function, a unit such as the HKS FCD can be used. When using an HKS FCD, a fuel controller may be required for additional fuel tuning. The HKS EVC enables the adjustment of the boost setting from inside the vehicle. Utilizing a stepping motor, it stimulates boost increase and attains the designated boost value without over-shooting. This product was developed to improve engine output and was designed to be used for racing in a closed circuit. Improving engine output may affect oil and/or water temperature and oil pressure. To preserve engine performance, regularly monitor engine conditions before driving. To use this product on public roads, follow the necessary procedures if there are any regulations for a tuned/modified vehicle. ●Compact Design Its compact designed display and stepping motor enables a versatile installation into the vehicle interior and the engine compartment. -

Innovate SCG-1 Manual
SCG-1 User Manual Warning! The Oxygen Sensor used in this device gets very hot in operation. Do not touch a hot sensor. Do not let a hot sensor touch a combustible surface. Do not use the sensor with or near flammable liquids or gases. Failure to heed these warnings may result in severe burns, explosions, fires, or other dangerous events. 1. SCG-1 ...................................................................................................... 2 1.1 Changing the SCG-1’s gauge face and/or bezel ............................. 3 2 Installation ................................................................................................ 4 2.1 Wiring ............................................................................................... 4 2.1.1 Single Innovate Device Relay Wiring Instructions ....................... 5 2.2 Gauge Mounting and Routing ......................................................... 5 2.3 Solenoid Installation ........................................................................ 6 2.3.1 Internal Wastegate ...................................................................... 6 2.3.2 External Wastegate ..................................................................... 7 2.4 MAP sensor ..................................................................................... 7 2.5 Wideband Oxygen Sensor Setup .................................................... 7 2.5.1 Oxygen Sensor Placement .......................................................... 7 2.5.2 Sensor Calibration ...................................................................... -
BOOST TEE Product Description: Manual Boost Controller Product Number: TS-0101-1001
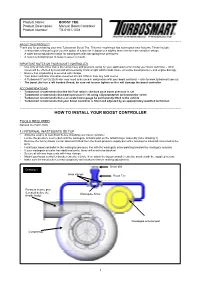
Product Name: BOOST TEE Product Description: Manual Boost Controller Product Number: TS-0101-1001 ------------------------------------------------------------------------------------------------------------------------ ABOUT THIS PRODUCT Thank you for purchasing your new Turbosmart Boost Tee. This new model now has some great new features. These include: • 2 ramp rates of boost to give you the option of a fast rise in boost or a slightly tame rise for more sensitive setups. • A wider boost adjustment range for wastegates with low spring base pressures. • A new mounting bracket to make it easier to mount. IMPORTANT NOTES ON YOUR BOOST CONTROLLER • Use only silicone hose that is the correct size and pressure rating for your application when fitting your boost controller – other hoses will be effected by heat and will eventually crack or split which could cause excessive boost pressure and engine damage • Ensure that all plumbing is secured with clamps • Your boost controller should be mounted at least 100mm from any heat source • A Turbosmart Fuel Cut Defender may need to be used in conjunction with your boost controller – refer to www.turbosmart.com.au • The boost dial has a left handed thread, be sure not to over tighten as this will damage the boost controller RECOMMENDATIONS • Turbosmart recommends that the Air Fuel ratio is checked once boost pressure is set • Turbosmart recommends that boost pressure is set using a Dynamometer and not on the street • Turbosmart recommends that a accurate boost gauge be permanently fitted to the vehicle -
Universal Manual Boost Controller
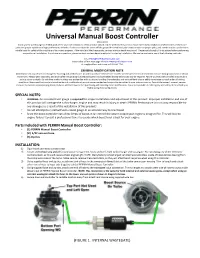
Universal Manual Boost Controller 2013-10-03 Thank you for purchasing this PERRIN product for your car! Installation of this product should only be performed by persons experienced with installation of aftermarket performance parts and proper operation of high performance vehicles. If vehicle needs to be raised off the ground for installation, the installer must use proper jacks, jack-stands and/or a professional vehicle hoist for safety of the installer and to protect property. If the vehicle is lifted improperly, serious injury or death may occur! Please read through all instructions before performing any portion of installation. If you have any questions, please contact our tech department prior to starting installation. We can be reached in any of the following methods: Email [email protected] Instant Chat off the main page of www.PERRINperformance.com Or simply call our tech team at 503-693-1702 GENERAL MODIFICATION NOTE Modifications to any vehicle can change the handling and performance. As with any vehicle extreme care must be used to prevent loss of control or roll-over during sharp turns or abrupt maneuvers. Always wear seat belts, and drive safely, recognizing that reduced speeds and specialized driving techniques may be required. Failure to drive a vehicle safely may result in serious injury or death. Do not drive a vehicle unless you are familiar with its unique handling characteristics and are confident of your ability to maintain control under all driving conditions. Some modifications (and combinations of modifications) are not recommended and may not be permitted in your state or country. Consult the owner’s manual, service manual, instructions accompanying these products, and local laws before purchasing and installing these modifications. -
Merlins Ecuflash EVO 7-8-9 TUNING GUIDE-V1.7A
MERLINS EcuFLASH EVO 7-8-9 TUNING GUIDE MERLINS EcuFLASH EVO 7-8-9 TUNING GUIDE MITSUBISHI EVO 7-8-9 TUNING REV: 1.7a [email protected] Page 1 of 172 MERLINS EcuFLASH EVO 7-8-9 TUNING GUIDE TABLE OF CONTENTS SECTION 1 œ INTRODUCTION TO ECUFLASH TUNING 12 1.1-INTRODUCTION AND ACKNOWLEDGMENTS 12 1.2-TUNING ABBREVIATIONS AND ACRONYMS 13 1.3-REQUIRED EQUIPMENT 14 1.4-ECUFLASH INTRODUCTION 17 1.5-PROGRAM INSTALLATION AND SETUP 17 1.6-XML DEFINITION FILES 17 1.7-RUN ECUFLASH 20 1.8-SETTING THE USER LEVEL & DIRECTORY 21 1.9-SETTING THE DEFAULT COLOUR MAP 22 1.10-CONNECTING TO THE ECU 23 1.11-ECU OPERATIONS 24 1.12-READING THE IMMOBILIZER CODE 25 1.13-EDITING FUNCTIONS AND 3D GRAPH VIEWING 26 1.14-GETTING STARTED œ PRELIMINARY TUNING ACTIVITIES 27 SECTION 2 œ FUEL TUNING 28 2.01-INTRODUCTION TO EVO FUEL METERING 28 2.02-FUEL TUNING œ STOCK LO-OCTANE FUEL MAP EVO7-8-9 31 2.03-FUEL TUNING œ TUNED LO-OCTANE FUEL MAP EVO7-8 32 2.04-FUEL TUNING œ TUNED LO-OCTANE FUEL MAP EVO9 32 2.05-FUEL TUNING œ STOCK HI OCTANE FUEL MAP 33 2.06-FUEL TUNING œ TUNED HI OCTANE FUEL MAP 34 2.07-FUEL TUNING œ OPEN LOOP TEMP THRESHOLD 35 2.08-FUEL TUNING - OPEN LOOP LOAD THRESHOLD V RPM 36 2.09-FUEL TUNING - OPEN LOOP TPS THRESHOLD V RPM 37 2.10-FUEL TUNING - DECEL FUELCUT DELAY V LOAD 38 2.11-FUEL TUNING - ACCEL ENRICH BASE V ENGINE TEMP 39 2.12-FUEL TUNING - ASYNCH_ACCEL TPS V RPM LIMIT 39 2.13-FUEL TUNING - LIMP HOME LOAD MAP, TPS V RPM 40 2.14-FUEL TUNING œ AFR AND KNOCKSUM 41 SECTION 3 œ IGNITION TUNING 42 3.01-IGNITION TUNING INTRODUCTION 42 3.02-IGNITION TUNING -

Modeling and Control of Actuators and Co-Surge in Turbocharged Engines
Linköping Studies in Science and Technology Dissertations, No. 1590 Modeling and control of actuators and co-surge in turbocharged engines Andreas Thomasson Department of Electrical Engineering Linköping University SE–581 83 Linköping, Sweden Linköping 2014 Linköping studies in science and technology. Dissertations, No. 1590 Modeling and control of actuators and co-surge in turbocharged engines Andreas Thomasson ISBN 978-91-7519-355-7 ISSN 0345-7524 © 2014 Andreas Thomasson, unless otherwise noted. All rights reserved. Andreas Thomasson [email protected] www.vehicular.isy.liu.se Division of Vehicular Systems Department of Electrical Engineering Linköping University SE–581 83 Linköping Sweden Paper 1 is reproduced here with permission from IFP Energies nouvelles Paper 2 is reproduced here with permission from IFAC Paper 3 is reproduced here with permission from Elsevier Paper 4 is reproduced here with permission from IFAC The cover: Photo of an electronic throttle, a pneumatic actuator, and a measurement of mass flows during co-surge, illustrating the main topics of the thesis. Typeset with LATEX 2ε Printed by LiU-Tryck, Linköping, Sweden 2014 i Abstract The torque response of the engine is important for the driving experience of a vehicle. In spark ignited engines, torque is proportional to the air flow into the cylinders. Controlling torque therefore implies controlling air flow. In modern turbocharged engines, the driver commands are interpreted by an electronic control unit that controls the engine through electromechanical and pneumatic actuators. Air flow to the intake manifold is controlled by an electronic throttle, and a wastegate controls the energy to the turbine, affecting boost pressure and air flow. -

Boost Controller Installation / Instruction Guide
Boost Controller Installation Guide BOOST CONTROLLER INSTALLATION / INSTRUCTION GUIDE Locate the Turbo Sensor in order to connect the boost controller. For 2004 – 2005 Models: Two Methods to locate and access and locate Turbo Sensor 1) Behind the AC Compressor. a) Remove the fan belt. b) Remove 4 bolts from the A/C compressor, but do not remove A/C pressurized line bolts. c) Lift the A/C compressor off and on rest it on the left side of the engine. e) Unplug the factory harness from the sensor and connect the Boost Controller in between the harness & sensor. 2) In front of the Air Intake Tube & Turbo. a) Remove the Air Intake Tube from the air cleaner box and turbo, loosen the clamp at the turbo inlet and remove intake air tube. b) Access will be under the rigid coolant pipe. d) The Sensor is directly behind the A/C c) Unplug the factory harness from the compressor under the rigid coolant pipe and sensor and connect the Boost Controller should be easy to access. Do not connect to a in between harness and sensor. a similar sensor which is located to the right of the boost sensor. It’s the Barometric Sensor and looks identical to the boost sensor. Pacific Performance Engineering Technical Support: (714) 985-4825 303 N Placentia Ave. Fax: (714) 985-9907 Fullerton, CA 92831 Email: [email protected] www.PPEDIESEL.com Rev: 05/09/2011 | v6.0 For 2006 - 2007 Models: Unplug factory harness from sensor and connect boost The Turbo Sensor is easily accessible with no need to controller in between harness & sensor.