A Parallel Maximal Independent Set Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Towards Maximum Independent Sets on Massive Graphs
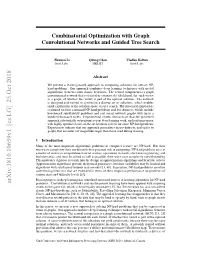
Towards Maximum Independent Sets on Massive Graphs Yu Liuy Jiaheng Lu x Hua Yangy Xiaokui Xiaoz Zhewei Weiy yDEKE, MOE and School of Information, Renmin University of China x Department of Computer Science, University of Helsinki, Finland zSchool of Computer Engineering, Nanyang Technological University, Singapore ABSTRACT Maximum independent set (MIS) is a fundamental problem in graph theory and it has important applications in many areas such as so- cial network analysis, graphical information systems and coding theory. The problem is NP-hard, and there has been numerous s- tudies on its approximate solutions. While successful to a certain degree, the existing methods require memory space at least linear in the size of the input graph. This has become a serious concern in !"#$!%&'!(#&)*+,+)*+)-#.+- /"#$!%&'0'#&)*+,+)*+)-#.+- view of the massive volume of today’s fast-growing graphs. Figure 1: An example to illustrate that fv , v g is a maximal inde- In this paper, we study the MIS problem under the semi-external 1 2 pendent set, but fv , v , v , v g is a maximum independent set. setting, which assumes that the main memory can accommodate 2 3 4 5 all vertices of the graph but not all edges. We present a greedy algorithm and a general vertex-swap framework, which swaps ver- duced subgraphs, minimum vertex covers, graph coloring, and tices to incrementally increase the size of independent sets. Our maximum common edge subgraphs, etc. Its significance is not solutions require only few sequential scans of graphs on the disk just limited to graph theory but also in numerous real-world ap- file, thus enabling in-memory computation without costly random plications, such as indexing techniques for shortest path and dis- disk accesses. -

Matroids You Have Known
26 MATHEMATICS MAGAZINE Matroids You Have Known DAVID L. NEEL Seattle University Seattle, Washington 98122 [email protected] NANCY ANN NEUDAUER Pacific University Forest Grove, Oregon 97116 nancy@pacificu.edu Anyone who has worked with matroids has come away with the conviction that matroids are one of the richest and most useful ideas of our day. —Gian Carlo Rota [10] Why matroids? Have you noticed hidden connections between seemingly unrelated mathematical ideas? Strange that finding roots of polynomials can tell us important things about how to solve certain ordinary differential equations, or that computing a determinant would have anything to do with finding solutions to a linear system of equations. But this is one of the charming features of mathematics—that disparate objects share similar traits. Properties like independence appear in many contexts. Do you find independence everywhere you look? In 1933, three Harvard Junior Fellows unified this recurring theme in mathematics by defining a new mathematical object that they dubbed matroid [4]. Matroids are everywhere, if only we knew how to look. What led those junior-fellows to matroids? The same thing that will lead us: Ma- troids arise from shared behaviors of vector spaces and graphs. We explore this natural motivation for the matroid through two examples and consider how properties of in- dependence surface. We first consider the two matroids arising from these examples, and later introduce three more that are probably less familiar. Delving deeper, we can find matroids in arrangements of hyperplanes, configurations of points, and geometric lattices, if your tastes run in that direction. -

Greedy Sequential Maximal Independent Set and Matching Are Parallel on Average
Greedy Sequential Maximal Independent Set and Matching are Parallel on Average Guy E. Blelloch Jeremy T. Fineman Julian Shun Carnegie Mellon University Georgetown University Carnegie Mellon University [email protected] jfi[email protected] [email protected] ABSTRACT edge represents the constraint that two tasks cannot run in parallel, the MIS finds a maximal set of tasks to run in parallel. Parallel al- The greedy sequential algorithm for maximal independent set (MIS) gorithms for the problem have been well studied [16, 17, 1, 12, 9, loops over the vertices in an arbitrary order adding a vertex to the 11, 10, 7, 4]. Luby’s randomized algorithm [17], for example, runs resulting set if and only if no previous neighboring vertex has been in O(log jV j) time on O(jEj) processors of a CRCW PRAM and added. In this loop, as in many sequential loops, each iterate will can be converted to run in linear work. The problem, however, is only depend on a subset of the previous iterates (i.e. knowing that that on a modest number of processors it is very hard for these par- any one of a vertex’s previous neighbors is in the MIS, or know- allel algorithms to outperform the very simple and fast sequential ing that it has no previous neighbors, is sufficient to decide its fate greedy algorithm. Furthermore the parallel algorithms give differ- one way or the other). This leads to a dependence structure among ent results than the sequential algorithm. This can be undesirable in the iterates. -

Fully Dynamic Maximal Independent Set with Polylogarithmic Update Time
2019 IEEE 60th Annual Symposium on Foundations of Computer Science (FOCS) Fully Dynamic Maximal Independent Set in Polylogarithmic Update Time Soheil Behnezhad∗, Mahsa Derakhshan∗, MohammadTaghi Hajiaghayi∗, Cliff Stein† and Madhu Sudan‡ ∗University of Maryland {soheil,mahsa,hajiagha}@cs.umd.edu †Columbia University [email protected] ‡Harvard University [email protected] Abstract— We present the first algorithm for maintaining a time. As such, one can trivially maintain MIS by recomput- maximal independent set (MIS) of a fully dynamic graph—which ing it from scratch after each update, in O(m) time. In a undergoes both edge insertions and deletions—in polylogarith- pioneering work, Censor-Hillel, Haramaty, and Karnin [15] mic time. Our algorithm is randomized and, per update, takes 2 2 O(log Δ · log n) expected time. Furthermore, the algorithm presented a round-efficient randomized algorithm for MIS in 2 4 can be adjusted to have O(log Δ · log n) worst-case update- dynamic distributed networks. Implementing the algorithm time with high probability. Here, n denotes the number of of [15] in the sequential setting—the focus of this paper— vertices and Δ is the maximum degree in the graph. requires Ω(Δ) update-time (see [15, Section 6]) where Δ The MIS problem in fully dynamic graphs has attracted sig- is the maximum-degree in the graph which can be as large nificant attention after a breakthrough result of Assadi, Onak, as Ω(n) or even Ω(m) for sparse graphs. Improving this Schieber, and Solomon [STOC’18] who presented an algorithm bound was one of the major problems the authors left 3/4 with O(m ) update-time (and thus broke the natural Ω(m) open. -

Minimum Dominating Set Approximation in Graphs of Bounded Arboricity
Minimum Dominating Set Approximation in Graphs of Bounded Arboricity Christoph Lenzen and Roger Wattenhofer Computer Engineering and Networks Laboratory (TIK) ETH Zurich {lenzen,wattenhofer}@tik.ee.ethz.ch Abstract. Since in general it is NP-hard to solve the minimum dominat- ing set problem even approximatively, a lot of work has been dedicated to central and distributed approximation algorithms on restricted graph classes. In this paper, we compromise between generality and efficiency by considering the problem on graphs of small arboricity a. These fam- ily includes, but is not limited to, graphs excluding fixed minors, such as planar graphs, graphs of (locally) bounded treewidth, or bounded genus. We give two viable distributed algorithms. Our first algorithm employs a forest decomposition, achieving a factor O(a2) approximation in randomized time O(log n). This algorithm can be transformed into a deterministic central routine computing a linear-time constant approxi- mation on a graph of bounded arboricity, without a priori knowledge on a. The second algorithm exhibits an approximation ratio of O(a log ∆), where ∆ is the maximum degree, but in turn is uniform and determinis- tic, and terminates after O(log ∆) rounds. A simple modification offers a trade-off between running time and approximation ratio, that is, for any parameter α ≥ 2, we can obtain an O(aα logα ∆)-approximation within O(logα ∆) rounds. 1 Introduction We are interested in the distributed complexity of the minimum dominating set (MDS) problem, a classic both in graph theory and distributed computing. Given a graph, a dominating set is a subset D of nodes such that each node in the graph is either in D, or has a direct neighbor in D. -

Maximal Independent Set
Maximal Independent Set Partha Sarathi Mandal Department of Mathematics IIT Guwahati Thanks to Dr. Stefan Schmid for the slides What is a MIS? MIS An independent set (IS) of an undirected graph is a subset U of nodes such that no two nodes in U are adjacent. An IS is maximal if no node can be added to U without violating IS (called MIS ). A maximum IS (called MaxIS ) is one of maximum cardinality. Known from „classic TCS“: applications? Backbone, parallelism, etc. Also building block to compute matchings and coloring! Complexities? MIS and MaxIS? Nothing, IS, MIS, MaxIS? IS but not MIS. Nothing, IS, MIS, MaxIS? Nothing. Nothing, IS, MIS, MaxIS? MIS. Nothing, IS, MIS, MaxIS? MaxIS. Complexities? MaxIS is NP-hard! So let‘s concentrate on MIS... How much worse can MIS be than MaxIS? MIS vs MaxIS How much worse can MIS be than MaxIS? minimal MIS? maxIS? MIS vs MaxIS How much worse can MIS be than Max-IS? minimal MIS? Maximum IS? How to compute a MIS in a distributed manner?! Recall: Local Algorithm Send... ... receive... ... compute. Slow MIS Slow MIS assume node IDs Each node v: 1. If all neighbors with larger IDs have decided not to join MIS then: v decides to join MIS Analysis? Analysis Time Complexity? Not faster than sequential algorithm! Worst-case example? E.g., sorted line: O(n) time. Local Computations? Fast! ☺ Message Complexity? For example in clique: O(n 2) (O(m) in general: each node needs to inform all neighbors when deciding.) MIS and Colorings Independent sets and colorings are related: how? Each color in a valid coloring constitutes an independent set (but not necessarily a MIS, and we must decide for which color to go beforehand , e.g., color 0!). -
Combinatorial Optimization with Graph Convolutional Networks and Guided Tree Search
Combinatorial Optimization with Graph Convolutional Networks and Guided Tree Search Zhuwen Li Qifeng Chen Vladlen Koltun Intel Labs HKUST Intel Labs Abstract We present a learning-based approach to computing solutions for certain NP- hard problems. Our approach combines deep learning techniques with useful algorithmic elements from classic heuristics. The central component is a graph convolutional network that is trained to estimate the likelihood, for each vertex in a graph, of whether this vertex is part of the optimal solution. The network is designed and trained to synthesize a diverse set of solutions, which enables rapid exploration of the solution space via tree search. The presented approach is evaluated on four canonical NP-hard problems and five datasets, which include benchmark satisfiability problems and real social network graphs with up to a hundred thousand nodes. Experimental results demonstrate that the presented approach substantially outperforms recent deep learning work, and performs on par with highly optimized state-of-the-art heuristic solvers for some NP-hard problems. Experiments indicate that our approach generalizes across datasets, and scales to graphs that are orders of magnitude larger than those used during training. 1 Introduction Many of the most important algorithmic problems in computer science are NP-hard. But their worst-case complexity does not diminish their practical role in computing. NP-hard problems arise as a matter of course in computational social science, operations research, electrical engineering, and bioinformatics, and must be solved as well as possible, their worst-case complexity notwithstanding. This motivates vigorous research into the design of approximation algorithms and heuristic solvers. -

(1, K)-Swap Local Search for Maximum Clique Problem
(1, k)-Swap Local Search for Maximum Clique Problem LAVNIKEVICH N. Given simple undirected graph G = (V, E), the Maximum Clique Problem(MCP) is that of finding a maximum-cardinality subset Q of V such that any two vertices in Q are adjacent. We present a modified local search algorithm for this problem. Our algorithm build some maximal solution and can determine in polynomial time if a maximal solution can be improved by replacing a single vertex with k, k ≥ 2, others. We test our algorithms on DIMACS[5], Sloane[15], BHOSLIB[1], Iovanella[8] and our random instances. 1. Introduction Given an arbitrary simple(without loops and multiple edges) undirected graph G = (V, E). The order of a graph is number of vertices n =|V|, where V = {1, …, n} is vertex set. Two vertices v and u of a graph G may be adjacent or not. If two vertices v and u are adjacent they perform an edge e(v, u). All edges perform edges set E. A graph's size is the number of edges in the graph, |E|= m. The neighbourhood N(v) of a vertex v in a graph G consists of all vertices adjacent to v, N(v) = { u | u V, e(v, u) E }. By 푁̅(v) we will denote set of all vertices not adjacent with v, 푁̅ (v) = { u | u V, u ≠ v and e(v, u) E }. A complement of graph G is the graph 퐺 = (V, 퐸) where 퐸 = { (v, u) | v, u V, v ≠ u and (v, u) E }. -

Greedy Maximal Independent Sets Via Local Limits
Greedy maximal independent sets via local limits Michael Krivelevich∗ Tam´as M´esz´aros† Peleg Michaeli‡ Clara Shikhelman§ July 12, 2021 Abstract The random greedy algorithm for finding a maximal independent set in a graph has been studied extensively in various settings in combinatorics, probability, computer science, and even chemistry. The algorithm builds a maximal independent set by inspecting the graph’s vertices one at a time according to a random order, adding the current vertex to the independent set if it is not connected to any previously added vertex by an edge. In this paper, we present a natural and general framework for calculating the asymptotics of the proportion of the yielded independent set for sequences of (possibly random) graphs, involving a notion of local convergence. We use this framework both to give short and simple proofs for results on previously studied families of graphs, such as paths and binomial random graphs, and to study new ones, such as random trees and random planar graphs. We conclude our work by analysing the random greedy algorithm more closely when the base graph is a tree. We show that in expectation, the cardinality of a random greedy independent set in the path is no larger than that in any other tree of the same order. 1 Introduction Algorithmic problems related to finding or approximating the independence number of a graph, or to producing large independent sets, have long been in the focus of the computer science com- munity. Computing the size of a maximum independent set is known to be NP-complete [33], and the groundbreaking work [18] on the difficulty of approximating it even made its way to The New York Times. -

Improved Distributed Approximations for Maximum Independent
Improved Distributed Approximations for Maximum-Weight Independent Set Ken-ichi Kawarabayashi∗ Seri Khouryy Aaron Schildz Gregory Schwartzmanx Abstract We present improved results for approximating maximum-weight independent set (MaxIS) in the CONGEST and LOCAL models of distributed computing. Given an input graph, let n and ∆ be the number of nodes and maximum degree, respectively, and let MIS(n; ∆) be the the running time of finding a maximal independent set (MIS) in the CONGEST model. Bar-Yehuda et al. [PODC 2017] showed that there is an algorithm in the CONGEST model that finds a ∆-approximation for MaxIS in O(MIS(n; ∆) log W ) rounds, where W is the maximum weight of a node in the graph, which can be as high as poly(n). Whether their algorithm is deterministic or randomized depends on the MIS algorithm that is used as a black-box. Our results: 1. A deterministic O(MIS(n; ∆)/)-round algorithm that finds a (1 + )∆-approximation for MaxIS in the CONGEST model. 2. A randomized (poly(log log n)/)-round algorithm that finds, with high probability, a (1 + )∆- approximation for MaxIS in the CONGEST model. That is, by sacrificing only a tiny fraction of the approximation guarantee, we achieve an exponential speed-up in the running time over the previous best known result. Due to a lower bound of Ω(plog n= log log n) that was given by Kuhn, Moscibroda and Wattenhofer [JACM, 2016] on the number of rounds for any (possibly randomized) algorithm that finds a maximal independent set (even in the LOCAL model) this result implies that finding a (1 + )∆-approximation for MaxIS is exponentially easier than MIS. -

The Worst-Case Time Complexity for Generating All Maximal Cliques and Computational Experiments Etsuji Tomitaa,∗, Akira Tanakaa,B, Haruhisa Takahashia
Theoretical Computer Science 363 (2006) 28–42 www.elsevier.com/locate/tcs The worst-case time complexity for generating all maximal cliques and computational experiments Etsuji Tomitaa,∗, Akira Tanakaa,b, Haruhisa Takahashia aThe University of Electro-Communications, Department of Information and Communication Engineering, Chofugaoka 1-5-1, Chofu, Tokyo 182-8585, Japan bToyota Techno Service Corporation, Imae 1-21, Hanamotocho, Toyota, Aichi 470–0334, Japan Abstract We present a depth-first search algorithm for generating all maximal cliques of an undirected graph, in which pruning methods are employed as in the Bron–Kerbosch algorithm. All the maximal cliques generated are output in a tree-like form. Subsequently, n/ we prove that its worst-case time complexity is O(3 3) for an n-vertex graph. This is optimal as a function of n, since there exist n/ up to 3 3 maximal cliques in an n-vertex graph. The algorithm is also demonstrated to run very fast in practice by computational experiments. © 2006 Elsevier B.V. All rights reserved. Keywords: Maximal cliques; Enumeration; Worst-case time complexity; Computational experiments 1. Introduction In an undirected graph G,aclique is a complete subgraph of G, i.e., a subgraph in which any two vertices are adjacent. The set of vertices of a maximal clique of the complementary graph of G is a maximal independent set of G. Generating maximal cliques or maximal independent sets of a given graph is one of the fundamental problems in the theory of graphs, and such a generation has many diverse applications, e.g., in clustering and in bioinformatics [15,16,8]. -

Maximal Independent Sets in Caterpillar Graphs✩,✩✩
Discrete Applied Mathematics 160 (2012) 259–266 Contents lists available at SciVerse ScienceDirect Discrete Applied Mathematics journal homepage: www.elsevier.com/locate/dam Maximal independent sets in caterpillar graphsI,II Carmen Ortiz a, Mónica Villanueva b,∗ a Faculty of Engineering and Science, Adolfo Ibáñez University, Chile b Faculty of Engineering, University of Santiago of Chile, Chile article info a b s t r a c t Article history: A caterpillar graph is a tree in which the removal of all pendant vertices results in a Received 1 October 2010 chordless path. In this work, we determine the number of maximal independent sets (mis) Received in revised form 11 October 2011 in caterpillar graphs. For a general graph, this problem is #P —complete. We provide a Accepted 17 October 2011 polynomial time algorithm to generate the whole family of mis in a caterpillar graph. We Available online 9 November 2011 also characterize the independent graph (intersection graph of mis) and the clique graph (intersection graph of cliques) of complete caterpillar graphs. Keywords: ' 2011 Elsevier B.V. All rights reserved. Graph algorithms Caterpillar graph Enumeration of maximal independent sets Intersection graph Independent graph Clique graph 1. Introduction Let G D .V ; E/ be a finite undirected connected graph with no multiple edges or self loops, vertex-set V .G/ D V , edge-set E.G/ D E; jV j D n and jEj D m. The neighbourhood of a vertex v in G is the set N.v/ D fu 2 V j.u; v/ 2 Eg. The complement graph of G is denoted by G.