Session Types = Intersection Types + Union Types
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metaobject Protocols: Why We Want Them and What Else They Can Do
Metaobject protocols: Why we want them and what else they can do Gregor Kiczales, J.Michael Ashley, Luis Rodriguez, Amin Vahdat, and Daniel G. Bobrow Published in A. Paepcke, editor, Object-Oriented Programming: The CLOS Perspective, pages 101 ¾ 118. The MIT Press, Cambridge, MA, 1993. © Massachusetts Institute of Technology All rights reserved. No part of this book may be reproduced in any form by any electronic or mechanical means (including photocopying, recording, or information storage and retrieval) without permission in writing from the publisher. Metaob ject Proto cols WhyWeWant Them and What Else They Can Do App ears in Object OrientedProgramming: The CLOS Perspective c Copyright 1993 MIT Press Gregor Kiczales, J. Michael Ashley, Luis Ro driguez, Amin Vahdat and Daniel G. Bobrow Original ly conceivedasaneat idea that could help solve problems in the design and implementation of CLOS, the metaobject protocol framework now appears to have applicability to a wide range of problems that come up in high-level languages. This chapter sketches this wider potential, by drawing an analogy to ordinary language design, by presenting some early design principles, and by presenting an overview of three new metaobject protcols we have designed that, respectively, control the semantics of Scheme, the compilation of Scheme, and the static paral lelization of Scheme programs. Intro duction The CLOS Metaob ject Proto col MOP was motivated by the tension b etween, what at the time, seemed liketwo con icting desires. The rst was to have a relatively small but p owerful language for doing ob ject-oriented programming in Lisp. The second was to satisfy what seemed to b e a large numb er of user demands, including: compatibility with previous languages, p erformance compara- ble to or b etter than previous implementations and extensibility to allow further exp erimentation with ob ject-oriented concepts see Chapter 2 for examples of directions in which ob ject-oriented techniques might b e pushed. -
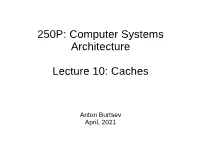
250P: Computer Systems Architecture Lecture 10: Caches
250P: Computer Systems Architecture Lecture 10: Caches Anton Burtsev April, 2021 The Cache Hierarchy Core L1 L2 L3 Off-chip memory 2 Accessing the Cache Byte address 101000 Offset 8-byte words 8 words: 3 index bits Direct-mapped cache: each address maps to a unique address Sets Data array 3 The Tag Array Byte address 101000 Tag 8-byte words Compare Direct-mapped cache: each address maps to a unique address Tag array Data array 4 Increasing Line Size Byte address A large cache line size smaller tag array, fewer misses because of spatial locality 10100000 32-byte cache Tag Offset line size or block size Tag array Data array 5 Associativity Byte address Set associativity fewer conflicts; wasted power because multiple data and tags are read 10100000 Tag Way-1 Way-2 Tag array Data array Compare 6 Example • 32 KB 4-way set-associative data cache array with 32 byte line sizes • How many sets? • How many index bits, offset bits, tag bits? • How large is the tag array? 7 Types of Cache Misses • Compulsory misses: happens the first time a memory word is accessed – the misses for an infinite cache • Capacity misses: happens because the program touched many other words before re-touching the same word – the misses for a fully-associative cache • Conflict misses: happens because two words map to the same location in the cache – the misses generated while moving from a fully-associative to a direct-mapped cache • Sidenote: can a fully-associative cache have more misses than a direct-mapped cache of the same size? 8 Reducing Miss Rate • Large block -

Chapter 2 Basics of Scanning And
Chapter 2 Basics of Scanning and Conventional Programming in Java In this chapter, we will introduce you to an initial set of Java features, the equivalent of which you should have seen in your CS-1 class; the separation of problem, representation, algorithm and program – four concepts you have probably seen in your CS-1 class; style rules with which you are probably familiar, and scanning - a general class of problems we see in both computer science and other fields. Each chapter is associated with an animating recorded PowerPoint presentation and a YouTube video created from the presentation. It is meant to be a transcript of the associated presentation that contains little graphics and thus can be read even on a small device. You should refer to the associated material if you feel the need for a different instruction medium. Also associated with each chapter is hyperlinked code examples presented here. References to previously presented code modules are links that can be traversed to remind you of the details. The resources for this chapter are: PowerPoint Presentation YouTube Video Code Examples Algorithms and Representation Four concepts we explicitly or implicitly encounter while programming are problems, representations, algorithms and programs. Programs, of course, are instructions executed by the computer. Problems are what we try to solve when we write programs. Usually we do not go directly from problems to programs. Two intermediate steps are creating algorithms and identifying representations. Algorithms are sequences of steps to solve problems. So are programs. Thus, all programs are algorithms but the reverse is not true. -

Create Union Variables Difference Between Unions and Structures
Union is a user-defined data type similar to a structure in C programming. How to define a union? We use union keyword to define unions. Here's an example: union car { char name[50]; int price; }; The above code defines a user define data type union car. Create union variables When a union is defined, it creates a user-define type. However, no memory is allocated. To allocate memory for a given union type and work with it, we need to create variables. Here's how we create union variables: union car { char name[50]; int price; } car1, car2, *car3; In both cases, union variables car1, car2, and a union pointer car3 of union car type are created. How to access members of a union? We use . to access normal variables of a union. To access pointer variables, we use ->operator. In the above example, price for car1 can be accessed using car1.price price for car3 can be accessed using car3->price Difference between unions and structures Let's take an example to demonstrate the difference between unions and structures: #include <stdio.h> union unionJob { //defining a union char name[32]; float salary; int workerNo; } uJob; struct structJob { char name[32]; float salary; int workerNo; } sJob; main() { printf("size of union = %d bytes", sizeof(uJob)); printf("\nsize of structure = %d bytes", sizeof(sJob)); } Output size of union = 32 size of structure = 40 Why this difference in size of union and structure variables? The size of structure variable is 40 bytes. It's because: size of name[32] is 32 bytes size of salary is 4 bytes size of workerNo is 4 bytes However, the size of union variable is 32 bytes. -

BALANCING the Eulisp METAOBJECT PROTOCOL
LISP AND SYMBOLIC COMPUTATION An International Journal c Kluwer Academic Publishers Manufactured in The Netherlands Balancing the EuLisp Metaob ject Proto col y HARRY BRETTHAUER bretthauergmdde JURGEN KOPP koppgmdde German National Research Center for Computer Science GMD PO Box W Sankt Augustin FRG HARLEY DAVIS davisilogfr ILOG SA avenue Gal lieni Gentil ly France KEITH PLAYFORD kjpmathsbathacuk School of Mathematical Sciences University of Bath Bath BA AY UK Keywords Ob jectoriented Programming Language Design Abstract The challenge for the metaob ject proto col designer is to balance the con icting demands of eciency simplici ty and extensibil ity It is imp ossible to know all desired extensions in advance some of them will require greater functionality while oth ers require greater eciency In addition the proto col itself must b e suciently simple that it can b e fully do cumented and understo o d by those who need to use it This pap er presents the framework of a metaob ject proto col for EuLisp which provides expressiveness by a multileveled proto col and achieves eciency by static semantics for predened metaob jects and mo dularizin g their op erations The EuLisp mo dule system supp orts global optimizations of metaob ject applicati ons The metaob ject system itself is structured into mo dules taking into account the consequences for the compiler It provides introsp ective op erations as well as extension interfaces for various functionaliti es including new inheritance allo cation and slot access semantics While -

Third Party Channels How to Set Them up – Pros and Cons
Third Party Channels How to Set Them Up – Pros and Cons Steve Milo, Managing Director Vacation Rental Pros, Property Manager Cell: (904) 707.1487 [email protected] Company Summary • Business started in June, 2006 First employee hired in late 2007. • Today Manage 950 properties in North East Florida and South West Florida in resort ocean areas with mostly Saturday arrivals and/or Saturday departures and minimum stays (not urban). • Hub and Spoke Model. Central office is in Ponte Vedra Beach (Accounting, Sales & Marketing). Operations office in St Augustine Beach, Ft. Myers Beach and Orlando (model home). Total company wide - 69 employees (61 full time, 8 part time) • Acquired 3 companies in 2014. The PROS of AirBNB Free to list your properties. 3% fee per booking (they pay cc fee) Customer base is different & sticky – young, urban & foreign. Smaller properties book better than larger properties. Good generator of off-season bookings. Does not require Rate Parity. Can add fees to the rent. All bookings are direct online (no phone calls). You get to review the guest who stayed in your property. The Cons of AirBNB Labor intensive. Time consuming admin. 24 hour response. Not designed for larger property managers. Content & Prices are static (only calendar has data feed). Closed Communication (only through Airbnb). Customers want more hand holding, concierge type service. “Rate Terms” not easy. Only one minimum stay, No minimum age ability. No easy way to add fees (pets, damage waiver, booking fee). Need to add fees into nightly rates. Why Booking.com? Why not Booking.com? Owned by Priceline. -

Abstract Data Types
Chapter 2 Abstract Data Types The second idea at the core of computer science, along with algorithms, is data. In a modern computer, data consists fundamentally of binary bits, but meaningful data is organized into primitive data types such as integer, real, and boolean and into more complex data structures such as arrays and binary trees. These data types and data structures always come along with associated operations that can be done on the data. For example, the 32-bit int data type is defined both by the fact that a value of type int consists of 32 binary bits but also by the fact that two int values can be added, subtracted, multiplied, compared, and so on. An array is defined both by the fact that it is a sequence of data items of the same basic type, but also by the fact that it is possible to directly access each of the positions in the list based on its numerical index. So the idea of a data type includes a specification of the possible values of that type together with the operations that can be performed on those values. An algorithm is an abstract idea, and a program is an implementation of an algorithm. Similarly, it is useful to be able to work with the abstract idea behind a data type or data structure, without getting bogged down in the implementation details. The abstraction in this case is called an \abstract data type." An abstract data type specifies the values of the type, but not how those values are represented as collections of bits, and it specifies operations on those values in terms of their inputs, outputs, and effects rather than as particular algorithms or program code. -
![[Note] C/C++ Compiler Package for RX Family (No.55-58)](https://docslib.b-cdn.net/cover/1179/note-c-c-compiler-package-for-rx-family-no-55-58-241179.webp)
[Note] C/C++ Compiler Package for RX Family (No.55-58)
RENESAS TOOL NEWS [Note] R20TS0649EJ0100 Rev.1.00 C/C++ Compiler Package for RX Family (No.55-58) Jan. 16, 2021 Overview When using the CC-RX Compiler package, note the following points. 1. Using rmpab, rmpaw, rmpal or memchr intrinsic functions (No.55) 2. Performing the tail call optimization (No.56) 3. Using the -ip_optimize option (No.57) 4. Using multi-dimensional array (No.58) Note: The number following the note is an identification number for the note. 1. Using rmpab, rmpaw, rmpal or memchr intrinsic functions (No.55) 1.1 Applicable products CC-RX V2.00.00 to V3.02.00 1.2 Details The execution result of a program including the intrinsic function rmpab, rmpaw, rmpal, or the standard library function memchr may not be as intended. 1.3 Conditions This problem may arise if all of the conditions from (1) to (3) are met. (1) One of the following calls is made: (1-1) rmpab or __rmpab is called. (1-2) rmpaw or __rmpaw is called. (1-3) rmpal or __rmpal is called. (1-4) memchr is called. (2) One of (1-1) to (1-3) is met, and neither -optimize=0 nor -noschedule option is specified. (1-4) is met, and both -size and -avoid_cross_boundary_prefetch (Note 1) options are specified. (3) Memory area that overlaps with the memory area (Note2) read by processing (1) is written in a single function. (This includes a case where called function processing is moved into the caller function by inline expansion.) Note 1: This is an option added in V2.07.00. -
POINTER (IN C/C++) What Is a Pointer?
POINTER (IN C/C++) What is a pointer? Variable in a program is something with a name, the value of which can vary. The way the compiler and linker handles this is that it assigns a specific block of memory within the computer to hold the value of that variable. • The left side is the value in memory. • The right side is the address of that memory Dereferencing: • int bar = *foo_ptr; • *foo_ptr = 42; // set foo to 42 which is also effect bar = 42 • To dereference ted, go to memory address of 1776, the value contain in that is 25 which is what we need. Differences between & and * & is the reference operator and can be read as "address of“ * is the dereference operator and can be read as "value pointed by" A variable referenced with & can be dereferenced with *. • Andy = 25; • Ted = &andy; All expressions below are true: • andy == 25 // true • &andy == 1776 // true • ted == 1776 // true • *ted == 25 // true How to declare pointer? • Type + “*” + name of variable. • Example: int * number; • char * c; • • number or c is a variable is called a pointer variable How to use pointer? • int foo; • int *foo_ptr = &foo; • foo_ptr is declared as a pointer to int. We have initialized it to point to foo. • foo occupies some memory. Its location in memory is called its address. &foo is the address of foo Assignment and pointer: • int *foo_pr = 5; // wrong • int foo = 5; • int *foo_pr = &foo; // correct way Change the pointer to the next memory block: • int foo = 5; • int *foo_pr = &foo; • foo_pr ++; Pointer arithmetics • char *mychar; // sizeof 1 byte • short *myshort; // sizeof 2 bytes • long *mylong; // sizeof 4 byts • mychar++; // increase by 1 byte • myshort++; // increase by 2 bytes • mylong++; // increase by 4 bytes Increase pointer is different from increase the dereference • *P++; // unary operation: go to the address of the pointer then increase its address and return a value • (*P)++; // get the value from the address of p then increase the value by 1 Arrays: • int array[] = {45,46,47}; • we can call the first element in the array by saying: *array or array[0]. -

Signedness-Agnostic Program Analysis: Precise Integer Bounds for Low-Level Code
Signedness-Agnostic Program Analysis: Precise Integer Bounds for Low-Level Code Jorge A. Navas, Peter Schachte, Harald Søndergaard, and Peter J. Stuckey Department of Computing and Information Systems, The University of Melbourne, Victoria 3010, Australia Abstract. Many compilers target common back-ends, thereby avoid- ing the need to implement the same analyses for many different source languages. This has led to interest in static analysis of LLVM code. In LLVM (and similar languages) most signedness information associated with variables has been compiled away. Current analyses of LLVM code tend to assume that either all values are signed or all are unsigned (except where the code specifies the signedness). We show how program analysis can simultaneously consider each bit-string to be both signed and un- signed, thus improving precision, and we implement the idea for the spe- cific case of integer bounds analysis. Experimental evaluation shows that this provides higher precision at little extra cost. Our approach turns out to be beneficial even when all signedness information is available, such as when analysing C or Java code. 1 Introduction The “Low Level Virtual Machine” LLVM is rapidly gaining popularity as a target for compilers for a range of programming languages. As a result, the literature on static analysis of LLVM code is growing (for example, see [2, 7, 9, 11, 12]). LLVM IR (Intermediate Representation) carefully specifies the bit- width of all integer values, but in most cases does not specify whether values are signed or unsigned. This is because, for most operations, two’s complement arithmetic (treating the inputs as signed numbers) produces the same bit-vectors as unsigned arithmetic. -

Parallel Optimization of the Set Data Structure
Parallel optimization of the set data structure Gustav Karlsson Gustav Karlsson Spring 2015 Bachelor’s thesis, 15 hp Supervisor: Jerry Eriksson Examiner: Pedher Johansson Bachelor’s program in computer science, 180 hp Abstract The Set data structure is a powerful and popular programmer’s tool based on set theory. Bulk operations such as addAll provide a sim- ple way of working with big collections of elements but can severely limit the performance of a multi-processor system when invoked on big sets if performed sequentially. Parallel processing is a technique that can significantly shorten the ex- ecution time of otherwise sequentially executed tasks. In this thesis, a new type of set is proposed that uses multiple threads to employ parallel processing for bulk operations. A new set is designed based on a non-blocking hash table with a high level of concurrency. The parallelization of the set makes use of paral- lel Java 8 streams to allow for quick iteration of the source collection elements, resulting in a speedup in processing of bulk operations. Testing the parallel set shows a significant increase in execution speed on bulk operations when operating on more than 10000 elements. Acknowledgements I would like to thank my supervisor Jerry Eriksson at Umea˚ University for helping me keep this work on track. I would also like to thank Pedher Johansson at Umea˚ University for giving me some valuable assistance and feedback. Finally, thank you Judith for your support, patience, and for putting up with my ramblings and rants. Contents 1 Introduction -
Coredx DDS Type System
CoreDX DDS Type System Designing and Using Data Types with X-Types and IDL 4 2017-01-23 Table of Contents 1Introduction........................................................................................................................1 1.1Overview....................................................................................................................2 2Type Definition..................................................................................................................2 2.1Primitive Types..........................................................................................................3 2.2Collection Types.........................................................................................................4 2.2.1Enumeration Types.............................................................................................4 2.2.1.1C Language Mapping.................................................................................5 2.2.1.2C++ Language Mapping.............................................................................6 2.2.1.3C# Language Mapping...............................................................................6 2.2.1.4Java Language Mapping.............................................................................6 2.2.2BitMask Types....................................................................................................7 2.2.2.1C Language Mapping.................................................................................8 2.2.2.2C++ Language Mapping.............................................................................8