Reducing Microphone Artefacts in Live Sound Clifford, Alice
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AEA-KU5A-Owners-Manual-Rev1.Pdf
AEA KU5A OWNER’S MANUAL ACTIVE CARDIOID END-ADDRESS RIBBON MIC WELCOME We congratulate you on your purchase of the AEA KU5A ribbon microphone and welcome you to the AEA family. Never before has a ribbon mic delivered such directionality and uncompromised tonality in a package so fit for both studio and live settings. The KU5A is ideal for studio and live applications where both superior rejection and classic ribbon tonality are paramount. Whether recording a vocal, guitar, or even a snare drum, the KU5A delivers brilliant, focused sound where other conventional ribbons can’t. From close range the KU5A retains the hefty low end and pronounced midrange one expects of AEA ribbons and with manageable proximity effect. Vocalists can sing directly into the grille of the KU5A because its interior components are the most protected of any in the AEA lineup. The rugged KU5A is equipped with active electronics, so it’s suited or any preamp in the studio and on the road. Your KU5A microphone is 100% handcrafted in Pasadena, CA. AEA is an independent, family owned company with a small crew of skilled technicians – many of whom are themselves, musicians. We manufacture all our ribbon microphones and preamps with locally sourced parts. We hope your microphone will capture many magical performances that touch the heart. This manual will help ensure that you get the best sound and longevity from your new microphone. Please become part of the AEA community by sharing your experiences via e-mail, phone or social media. Wes Dooley President of AEA 2 CONTENTS 2 WELCOME 4 INTRODUCTION 4 SUPPORT 5 GENERAL GUIDELINES 7 APPLICATION ADVICE 10 SPECIFICATIONS 3 INTRODUCTION The KU5A is an end-address, phantom-powered, supercardioid ribbon microphone. -

Bachelor Thesis
BACHELOR THESIS Relationship Between Distance and Microphone Directivity in a Speaker Booth Björn Samuelsson 2015 Bachelor of Arts Audio Engineering Luleå University of Technology Department of Arts, Communication and Education Relationship between distance and microphone directivity in a speaker booth Abstract A study was made to investigate trained listeners preferences regarding a microphone's directivity and distance from a speaker when listening to a voice recorded in a speaker booth. Two directivities (omnidirectional and cardioid) and three distances (5, 25 and 52 cm) were tested on 19 subjects in a multiple comparison listening test regarding their preference and five other attributes taken from earlier studies. The result showed that an omnidirectional microphone placed close to a source might be preferable over a cardioid at the same distance or a cardioid placed a bit away from the source. The omnidirectional microphone however tends to perform more even at different distances compared to a cardioid, which makes it easier for a engineer to find a good microphone position for it. Table of Content Acknowledgements..........................................................................................................3 1. Introduction.....................................................................................................................4 1.1. Aim............................................................................................................................4 1.2. Research question....................................................................................................4 -
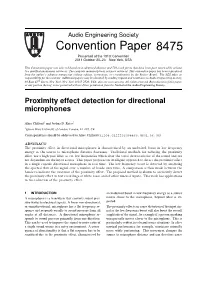
Proximity Effect Detection for Directional Microphones
Audio Engineering Society Convention Paper 8475 Presented at the 131st Convention 2011 October 20–23 New York, USA This Convention paper was selected based on a submitted abstract and 750-word precis that have been peer reviewed by at least two qualified anonymous reviewers. The complete manuscript was not peer reviewed. This convention paper has been reproduced from the author’s advance manuscript without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. Additional papers may be obtained by sending request and remittance to Audio Engineering Society, 60 East 42nd Street, New York, New York 10165-2520, USA; also see www.aes.org. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. Proximity effect detection for directional microphones Alice Clifford1 and Joshua D. Reiss1 1Queen Mary University of London, London, E1 4NS, UK Correspondence should be addressed to Alice Clifford ([email protected]) ABSTRACT The proximity effect in directional microphones is characterised by an undesired boost in low frequency energy as the source to microphone distance decreases. Traditional methods for reducing the proximity effect use a high pass filter to cut low frequencies which alter the tonal characteristics of the sound and are not dependent on the input source. This paper proposes an intelligent approach to detect the proximity effect in a single capsule directional microphone in real time. The low frequency boost is detected by analysing the spectral flux of the signal over a number of bands over time. -

Product Information U 87 Ai
Product Information U87Ai Large Diaphragm Microphone Georg Neumann GmbH, Berlin • Ollenhauerstr. 98 • 13403 Berlin • Germany • Tel.: +49 (30) 417724-0 • Fax: +49 (30) 417724-50 E-Mail: [email protected], [email protected], [email protected] • Website: www.neumann.com he U 87 is probably the best known and most widely used Neumann studio micro- phone. It is equipped with a large dual-diaphragm capsu- le with three directional pat- terns: omnidirectional, car- dioid and figure-8. These are selectable with a switch below the headgrille. A 10 dB attenuation switch is located on the rear. It enables the microphone to handle sound pressure levels up to 127 dB without distortion. Furthermore, the low fre- quency response can be reduced to compen- sate for proximity effect. Applications The U 87 Ai condenser microphone is a large diaphragm microphone with three polar pat- terns and a unique frequency and transient re- sponse characteristic. Users recognize the microphone immediately by its distinctive design. It is a good choice for most general purpose applications in studios, for broadcasting, film and television. The U 87 Ai is used as a main microphone for orchestra recordings, as a spot mic for single instruments, and extensively as a vocal micro- phone for all types of music and speech. Acoustic features The U 87 Ai is addressed from the front, mar- ked with the Neumann logo. The frequency response of the cardioid and figure-8 directio- nal characteristics are very flat for frontal sound incidence, even in the upper frequency Features range. • Variable large diaphragm • Switchable low frequency The microphone can be used microphone roll-off very close to a sound source • Pressure-gradient transducer • Switchable 10 dB pre- without the sound becoming with double membrane capsule attenuation unnaturally harsh. -
R-121 CD-R Manual 2019
Royer Labs Model R-121 Mono Ribbon Velocity Microphone Operation Instructions Manual & User Guide Made in U.S.A. TABLE OF CONTENTS Model R-121 Ribbon Microphone Revised A Introduction 3 Description 3 Applications 3 Ribbons in the Digital World 4 User Guide 4 Using the R-121 Ribbon Microphone 4 Amplification Considerations 5 Equalization & Ribbon Microphones 6 Hum, Noise & Mic Orientation 7 The Sweet Spot 7 Finding and Working with the Sweet Spot 7 Other Types of Microphones 8 Proximity Effect and Working Distance 8 The Sound That Is “More Real than Real” 8 Microphone Techniques 9 General Tips for Using the Royer R-121 9 Recording Loud or Plosive Sounds 11 Stereophonic Microphone Techniques 12 Classic Blumlein Technique 13 Mid-Side (M-S) Technique 13 Specialized Recording Techniques 14 Recording on the back side of the R-121 14 Care & Maintenance 15 Features 16 Electrical Specifications 17 Mechanical Specifications 17 Polar Pattern 18 Frequency Response 18 Warranty 18 2 Introduction Congratulations on your purchase of a Royer Labs model R-121 ribbon microphone. The R-121 is a handcrafted precision instrument capable of delivering superior sound quality and exceptional performance. This operator’s manual describes the R-121, its function and method of use. It also describes the care and maintenance required to ensure proper operation and long service life. The user guide section of this manual offers practical information that is designed to maximize the performance capabilities of this microphone. Royer Labs products are manufactured to the highest industrial standards using only the finest materials obtainable. Your model R-121 went though extensive quality control checks before leaving the factory. -

Microphone Techniques
A Shure Educational Publication MICROPHONE TECHNIQUES RECORDING Microphone Techniques for Table of Contents RECORDING Introduction: Selection and Placement of Microphones ............. 4 Section One .................................................................................. 5 Microphone Techniques ........................................................ 5 Vocal Microphone Techniques ............................................... 5 Spoken Word/“Podcasting” ................................................... 7 Acoustic String and Fretted Instruments ................................ 8 Woodwinds .......................................................................... 13 Brass ................................................................................... 14 Amplified Instruments .......................................................... 15 Drums and Percussion ........................................................ 18 Stereo .................................................................................. 21 Introduction: Fundamentals of Microphones, Instruments, and Acoustics ....................................................... 23 Section Two ................................................................................ 24 Microphone Characteristics ................................................. 24 Instrument Characteristics ................................................... 27 Acoustic Characteristics ....................................................... 28 Shure Microphone Selection Guide .................................... -

IT ALL STARTS with the MICROPHONE Things You Were Never Told
IT ALL STARTS WITH THE MICROPHONE THINGS YOU WERE NEVER TOLD $10 BOB HEIL PreFace Have you ever had the experience of a using a very expensive sound system and the sound was still awful? Have you ever been at a concert and not been able to understand the singer? Or been at a football game and not been able to understand the announcer? These are often examples of poor or improper use of the microphones—the source of all sound in modern sound systems. The microphone is the single most important piece of equipment in nearly every audio chain. You can have a very expensive sound system and if you do not understand how to use a microphone, the sound will be terrible. The quality of sound at the end (your ears) depends on the quality at the beginning. If you work with sound, it is essential that you have a thorough grasp of how microphones work, the different types of microphones and what they do. How a microphone sounds and behaves in a particular situation will significantly affect your success in achieving “good” sound. This publication is targeted at educating those of us who use microphones every day yet may not be technical whiz kids. While sound does involve physics, the basic understanding of microphones is not rocket science! We will bring new and informative “light” to the subject of mics, and also discuss and define issues that affect them and their surroundings. You will discover important information that will help you get the most from your microphones and improve the sound you work with. -

Blah3: Is My Decoder Ambisonic?
Is My Decoder Ambisonic? Aaron J. Heller Artificial Intelligence Center, SRI International Menlo Park, CA 94025, USA Email: [email protected] Richard Lee Eric M. Benjamin Pandit Littoral Dolby Laboratories Cooktown, Queensland 4895, AU San Francisco, CA 94044, USA Email: [email protected] Email: [email protected] Revision 2 Abstract In earlier papers, the present authors established the importance of various aspects of Am- bisonic decoder design: a decoding matrix matched to the geometry of the loudspeaker array in use, phase-matched shelf filters, and near-field compensation [1, 2]. These are needed for accurate reproduction of spatial localization cues, such as interaural time difference (ITD), interaural level difference (ILD), and distance cues. Unfortunately, many listening tests of Ambisonic reproduction reported in the literature either omit the details of the decoding used or utilize suboptimal decoding. In this paper we review the acoustic and psychoacoustic criteria for Ambisonic reproduc- tion, present a methodology and tools for “black box” testing to verify the performance of a candidate decoder, and present and discuss the results of this testing on some widely used decoders. Keywords: Ambisonics, decoder design, listening tests, surround sound, psychoacoustics NOTE: This is a revised and corrected version of the paper presented at the 125th Convention of the Audio Engineering Society, held October 1 – 5, 2008 in San Francisco, CA USA $Id: imda-revised.tex 25737 2012-06-10 23:40:07Z heller $ 1 1 INTRODUCTION rience with good Ambisonic reproduction, we This paper is about testing Ambisonic de- might have stopped there and written off Am- coders. -

Unique Directional Properties of Dual-Diaphragm Microphones
Unique Directional Properties of Dual-Diaphragm Microphones Guy Torio, Jeff Segota Department of Acoustical Development Shure Incorporated Evanston, Illinois 60202, USA Abstract - Dual-diaphragm condenser capsules are commonly used in popular multi-pattern microphones, as well as some single pattern unidirectional designs. These capsules react much differently to sound sources than single- diaphragm capsules in the frequency range up to approximately 1 kHz. As a method of developing intuition, frequency response and directionality as a function of distance from the sound source are demonstrated using a simple model. Pop sensitivity and multi-pattern operation are also investigated. Comparisons and conclusions are validated with measurements made on physical microphones. 1. INTRODUCTION A practical and effective method for implementing multiple directional responses in a condenser microphone is to use a dual-diaphragm capsule. Since its invention by Von Braummuhl and Weber in the 1930’s [1], numerous manufacturers have used this approach to produce many popular and commonly used studio microphones. Also, several single pattern designs contain dual-diaphragm capsules. The frequency and polar responses of directional microphones are dependent upon proximity of the sound source, particularly at frequencies below 1 kHz. This subject has been studied for the case of a single-diaphragm condenser capsule [2]. Dual-diaphragm condenser capsules respond differently, however, and this can have real implications in certain applications. The main purpose of this study is to derive and measure the effect of source proximity on the frequency and polar responses of a dual-diaphragm condenser capsule operating as a cardioid, and to compare the results to that of a single-diaphragm cardioid capsule. -

Microphones 101 - a Brief Guide
Microphones 101 - A Brief Guide Introduction If microphones seem a mystery, a few minutes reading this guide may help clear up some misconceptions and assist you in understanding the differences between various microphone types and the advantages of important microphone features. The fact is, microphones are simple devices. And if you know the meaning of just a few key terms, you are well on your way to becoming a microphone expert. With this basic knowledge under your belt, it will be easier to select the right model for almost any application. Although there are many kinds of microphones for many uses, we will concentrate on those models most suited for high-quality recording, broadcasting and sound reinforcement. We’ll skip over the most common microphone of them all (the one in your phone) and many specialised types used for CB radio, industry and other similar areas. Contents 1. What A Microphone Does Find out about Dynamic Microphones, Condenser Microphones, Phantom Power for Condenser Mics as well as Other Types of Microphones. 2. What's the Pattern? Omnidirectional, Directional, Representing Polar Patterns, Distance Factor, Line Microphones, How Do They Sound? Proximity Effect, Which Pattern is "Best"? 3. Important Microphone Characteristics Find out about Impedance, Balanced Output, Microphone Phasing and Sensitivity. 4. Two Common Problems Find out about Feedback and Acoustic Phase Interference. 5. Some Basic Concepts The Basic Sound System, Why Condenser Microphones, Why Unidirectional Microphones. 6. Miking Musical Instruments How to mic a Grand Piano, Upright Piano and Acoustic Guitars. What A Microphone Does Like phono cartridges, headphones and loudspeakers, the microphone is a transducer —in other words, an energy converter. -

Omni Application Guide
Omni Application Guide At Earthworks we are concerned that unfamiliarity with omni microphone use may be precluding some people from trying out our omnis. Before Earthworks, most of us never gave omnis a second look much less a serious listen simply because of their lack of directionality. They cause feedback, right? How do you get any separation? They pick up everything, don’t they? And what about their imaging in stereo? It turns out that omnis do have very positive strengths for recording and even sound reinforcement applications. They sound great! They add very little phase distortion or coloration. You just have to know how to use them. Don’t let the discussions of technical issues throw you off, skip ahead to the specifics that interest you. Why omni? – Omnis have some inherent advantages over directional mics. They sample sound at a single point in space, capturing it exactly – directional mics use a combination of sounds sampled at several different points to achieve rear rejection, creating phase problems in the process. The omnis do not exhibit any proximity effect or off-axis coloration. They have extended accurate low frequency response. Benefits of Earthworks Omnis – Earthworks omnis are designed for the best time-domain performance. Their impulse response is the most accurate of any recording microphones available on the market. They impose no coloration on the signal and have very high SPL handling capabilities, which makes it possible to position them very close to the source. Earthworks omnis have accurate and extended low frequency response (9Hz for TC30 or 4Hz for QTC40). -

Chapter 5(A): Microphones This Is Where It All Begins Really – the Microphone Emulates the Human Ear and Responds to the Pressure Variations of the Sound Waves
Chapter 5(a): Microphones This is where it all begins really – the microphone emulates the human ear and responds to the pressure variations of the sound waves. Microphones range from extremely inexpensive “throw-away” units, to precise studio instruments costing tens of thousands of dollars. They all sound slightly different, and if you ask any three audio professionals what they think of a particular microphone, you will probably get at least 5 different answers. In recent years, the quality of even inexpensive microphones has dramatically improved, and there are some real bargains out there. There are even quality microphones available which plug directly into a computer USB slot. But if you hope to be able to make a wise selection among the plethora of options, you need to know some very basic information. So, once again, we begin with some definitions. Transducer: Any device that transfers the energy of one system to another. These may be the same or different types of systems (i.e. motion to electricity, electric signal to sound, sound pressure to electricity etc.). Microphone: A transducer that converts sound pressure to an electrical signal1. The first broad classification of microphones is as to the manner in which this conversion takes place, and consists of Dynamic and Condenser (or Capacitor) microphone types. Dynamic Microphone: One in which the electrical signal is produced by the movement of a conductor through a magnetic field. There are two major types of dynamic microphones, moving coil, and ribbon. Moving Coil microphone: A coil of wire wrapped around a tube is attached to the rear of the microphone diaphragm (the disc that is moved by the force of the sound pressure), and suspended in a magnetic field.