Tr-Set-207-All
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Digital Adapter Channel Lineup
Digital Adapter Channel Lineup BREVARD, FLAGLER, VOLUSIA, LAKE, MARION, ORANGE, OSCEOLA, SEMINOLE AND SUMTER november 2013 basic & standard channels specific to county basic & standard channels all counties ORANGE, OSCEOLA, SEMINOLE 97 Zap2it 2 WUCF PBS 8 WKCF CW 113 Bright House Sports Network 3 WOFL FOX 9 See specific to county C-SPAN 4 WESH NBC 10 WRDQ C-SPAN2 5 WKMG CBS 11 TNT C-SPAN3 6 WRBW MyTV 12 TBS WEFS 7 WFTV ABC 13 News 13 456 WEFS Classic Arts 15 WDSC 14 WACX 457 WEFS NASA Education 16 WOPX ION 458 WEFS Florida Channel 20 WGN 17 WOTF UniMás 459 WDSC-ED 21 QVC 18 WVEN Univision 460 WDSC MHz Worldview 49 Bright House Networks 49 19 WTGL 463 WKMG RTV 198 Vision TV (Orange only) 464 WKCF Estrella 199 Government/Education 22 WHLV TBN 465 WRDQ Antenna TV 200 Government Access (Ocoee only) 23 HLN 466 WKCF This TV 24 CNN 468 WESH Me-TV 25 CNBC 469 WFTV Mega TV 26 MSNBC 470 WUCF PBS 27 Weather Channel 471 WUCF Create 28 Fox News 472 WUCF UCF/World 29 ESPN 473 WUCF V-me 30 ESPN2 1013 News 13 HD 31 Sun Sports 1016 WOPX ION HD 32 Fox Sports 1 1018 WVEN Univision HD 34 Nickelodeon 1020 WESH NBC HD 35 Disney Channel 1024 WUCF PBS HD 36 Cartoon Network 1027 WRDQ HD 37 WE 1035 WOFL HD 38 TV Land 1050 WDSC HD 39 USA 1060 WKMG CBS HD 40 Lifetime 1065 WRBW MyTV HD 41 Discovery 1080 WKCF CW HD 42 A&E 1090 WFTV ABC HD 43 History 1102 Nickleodeon HD 44 Animal Planet 1105 Disney Channel HD 45 TLC 1122 Hallmark Channel HD 46 TCM 1127 ESPN HD 47 Bright House Sports Network 1128 ESPN2 HD 48 AMC 1154 Golf Channel HD 49 See specific to county 1214 Fox -
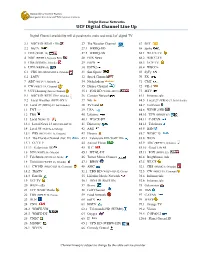
UCF Digital Channel Line Up
University of Central Florida Computer Services and Telecommunications Bright House Networks UCF Digital Channel Line Up Digital Channel availability will depend on the make and model of digital TV. 2.1 NBC HD (WESH 2-HD) 27 The Weather Channel 67 BET 2.2 MeTV 27.1 WRDQ-HD 68 Spike 3 FOX (WOFL 35) 27.2 WRDQ-AN 68.1 WUCF-TV 4 NBC (WESH 2, Daytona Bch) 28 FOX News 68.2 WBCC-TV 5 CBS (WKMG 6, Orlando) 29 ESPN 68.3 UCF-TV 6 UPN (WRBW 65) 30 ESPN2 68.4 WBCC+ 6.1 CBS HD (WKMG-HD 6, Orlando) 31 Sun Sports 69 SyFy 6.2 LATV 32 Speed Channel 70 FX 7 ABC (WFTV 9, Orlando) 34 Nickelodeon 71 CMT 8 CW (WKCF 18, Clermont) 35 Disney Channel 72 VH-1 9 UCF Housing (Movie Channel) 35.1 FOX HD (WOFL-HD 35) 73 MTV 9.1 ABC HD (WFTV-HD 9, Orlando) 36 Cartoon Network 81.1 Infomercials 9.2 Local Weather (WFTV-WX 9) 37 WE 84.5 Local 27 (WRDQ-27, Ind Orlando) 10 Local 27 (WRDQ-27, Ind Orlando) 38 TV Land 84.7 Univision 11 TNT 39 USA 84.8 WESH 2 HD 12 TBS 40 Lifetime 84.10 UPN (WRBW 65) 13 Local News 13 40.1 WACX-DT 84.11 C-SPAN 13.1 Local News 13 HD (CFN-HD 13) 41 Discovery 84.12 Telefutura 14 Local 55 (WACX, Leesburg) 42 A&E 85.5 HSN 15.1 PBS (WCEU-DT 15, Daytona) 43 History 85.7 WDSC 15 15.2 The Florida Channel (DSC-ED) 43.1 Telefutura HD (WOTF-HD) 85.8 WGN 15.3 CCTV 9 44 Animal Planet 85.9 ABC (WFTV 9, Orlando) 15.13 Galavision HD 45 TLC 85.10 Good Life 45 16 ION (WOPX 56, Orlando) 45.1 WTGL-DT 85.11 FOX (WOFL 35) 17 Telefutura (WOTF 43, Melb.) 46 Turner Movie Classics 86.4 Brighthouse Ads 18 Univision (WVEN 26, Orlando) 47.1 BHSN 87.3 WUCF 18.1 CW HD (WKFC-HD -

I. Tv Stations
Before the FEDERAL COMMUNICATIONS COMMISSION Washington, DC 20554 In the Matter of ) ) MB Docket No. 17- WSBS Licensing, Inc. ) ) ) CSR No. For Modification of the Television Market ) For WSBS-TV, Key West, Florida ) Facility ID No. 72053 To: Office of the Secretary Attn.: Chief, Policy Division, Media Bureau PETITION FOR SPECIAL RELIEF WSBS LICENSING, INC. SPANISH BROADCASTING SYSTEM, INC. Nancy A. Ory Paul A. Cicelski Laura M. Berman Lerman Senter PLLC 2001 L Street NW, Suite 400 Washington, DC 20036 Tel. (202) 429-8970 April 19, 2017 Their Attorneys -ii- SUMMARY In this Petition, WSBS Licensing, Inc. and its parent company Spanish Broadcasting System, Inc. (“SBS”) seek modification of the television market of WSBS-TV, Key West, Florida (the “Station”), to reinstate 41 communities (the “Communities”) located in the Miami- Ft. Lauderdale Designated Market Area (the “Miami-Ft. Lauderdale DMA” or the “DMA”) that were previously deleted from the Station’s television market by virtue of a series of market modification decisions released in 1996 and 1997. SBS seeks recognition that the Communities located in Miami-Dade and Broward Counties form an integral part of WSBS-TV’s natural market. The elimination of the Communities prior to SBS’s ownership of the Station cannot diminish WSBS-TV’s longstanding service to the Communities, to which WSBS-TV provides significant locally-produced news and public affairs programming targeted to residents of the Communities, and where the Station has developed many substantial advertising relationships with local businesses throughout the Communities within the Miami-Ft. Lauderdale DMA. Cable operators have obviously long recognized that a clear nexus exists between the Communities and WSBS-TV’s programming because they have been voluntarily carrying WSBS-TV continuously for at least a decade and continue to carry the Station today. -

Central Florida Channel Lineup Q3 2021
Q3 2021 Central Florida Channel Lineup DigiBasic DigiMax 38 A&E 60 FX 86 Start TV (WKMG 6.4) 244 American Heroes 260 Game Show Network Channel 110 America Teve 106 FXX 11 Super Channel 291 Hallmark Channel HD 280 BET Jams 52 AMC 45 FYI (WACX) 295 Hallmark Drama HD HD 274 BET Gospel 56 Animal Planet 19 Galavision 62 SyFy 293 Hallmark Movies 273 BET HR 92 AV (WACX2) 92 GOD TV (WACX) 16 TBN (WHLV) and Mysteries HD 271 BET Soul 84 AWE HD 34 Golf Channel 35 TBS 294 Independent Film 238 Boomerang HD 56 BBC America 59 HGTV 15 Telemundo Channel HD 225 CBS Sports HD 67 BET 21 Headline News (WTMO) 255 Lifetime Real Women 277 CMT Music 32 Big Ten Network HD 88 Hillsong (WHLV) 98 The Florida Channel 256 Logo (WEFS) 201 CNBC World 22 Bloomberg 46 History Channel 245 Military History Channel 54 The Learning 202 CNN International HD 39 Bravo 101 Home Shopping 221 MLB Network HD Channel 253 Cooking Channel HD HD 108 BTN Network 249 Motor Trend 13 The Weather 241 Crime & Investigation 111 BYU TV HD 93 Inspire (WACX3) 270 MTV Classic Channel 204 C-SPAN3 HD 44 Cartoon Network 50 Investigation 279 MTV Hits Discovery 113 The Weather 246 Destination America HD 6 CBS (WKMG) HD 278 MTV2 10 ION (WOPX) HD Channel HD 233 Discovery Family HD 68 CMT 250 National Geographic 94 IONLife (WOPX) 79 ThisTV (WKCF) 215 Discovery Life HD 25 CNBC 251 Nat Geo Wild 89 JCTV (WHLV) 36 TNT 232 Disney XD HD HD 20 CNN 223 NBA TV 74 Laff 58 Travel Channel 252 DIY Network HD 64 Comedy Central WFTV 220 NBC Sports Network 47 Lifetime 70 truTV 212 ESPN Classic HD 71 C-SPAN 224 NFL Network 51 LMN 53 Turner Classic 211 ESPNews HD HD 72 C-SPAN2 222 NHL Network 73 MeTV Movies 213 ESPNU HD 18 CW 18 (WKCF) 235 Nick Jr. -

Central Florida Channel Lineup
January 2021 For the latest channel lineup please visit summit-broadband.com Central Florida Channel Lineup DigiBasic DigiMax 38 A&E 106 FXX (WACX) 244 American Heroes 260 Game Show Network Channel 110 America Teve 45 FYI 62 SyFy 291 Hallmark Channel HD HD 280 BET Jams 52 AMC 19 Galavision 16 TBN (WHLV) 295 Hallmark Drama HD 274 BET Gospel 56 Animal Planet 92 GOD TV (WACX) 35 TBS 293 Hallmark Movies 273 BET HR 92 AV (WACX2) 34 Golf Channel 15 Telemundo and Mysteries HD HD 271 BET Soul 27 BBC America 59 HGTV (WTMO) 294 Independent Film 238 Boomerang 67 BET 21 Headline News 98 The Florida Channel Channel HD (WEFS) 225 CBS Sports HD 32 Big Ten Network HD 88 Hillsong (WHLV) 255 Lifetime Real Women 54 The Learning 277 CMT Music 22 Bloomberg 46 History Channel 256 Logo Channel 201 CNBC World 39 Bravo 101 Home Shopping 245 Military History Channel HD 13 The Weather 202 CNN International 108 BTN Network 221 MLB Network HD Channel 253 Cooking Channel HD 111 BYU TV HD 93 Inspire (WACX3) 249 Motor Trend HD 113 The Weather 241 Crime & Investigation 44 Cartoon Network 50 Investigation 270 MTV Classic Discovery Channel HD 204 C-SPAN3 HD 6 CBS (WKMG) HD 279 MTV Hits 10 ION (WOPX) HD 79 ThisTV (WKCF) 246 Destination America HD 68 CMT 278 MTV2 94 IONLife (WOPX) 36 TNT 233 Discovery Family 25 CNBC 250 National Geographic HD 89 JCTV (WHLV) 58 Travel Channel 215 Discovery Life 20 CNN 251 Nat Geo Wild HD 74 Laff 70 truTV 232 Disney XD HD 64 Comedy Central 223 NBA TV HD 47 Lifetime 53 Turner Classic 252 DIY Network 71 C-SPAN 220 NBC Sports Network HD 51 LMN Movies 212 ESPN Classic 72 C-SPAN2 224 NFL Network HD 73 MeTV 43 TV Land 211 ESPNews HD 18 CW 18 (WKCF) 222 NHL Network HD 24 MSNBC 12 UniMas HD 213 ESPNU HD 85 DABL (WKMG 6.2) HD 235 Nick Jr. -

Orlando-Daytona Beach-Melbourne, FL
TV Station WACX · Analog Channel 55, DTV Channel 40 · Leesburg, FL Expected Change In Coverage: Licensed Operation Licensed (solid): 1000 kW ERP at 494 m HAAT vs. Analog (dashed): 5000 kW ERP at 515 m HAAT Market: Orlando-Daytona Beach-Melbourne, FL FL-4 Union Columbia Bradford Clay St. Johns Alachua Gainesville FL-6 Putnam FL-3 FL-7 Flagler Levy FL-8 Marion Ocala Daytona Beach Volusia Lake A55 Deltona Citrus Leesburg Seminole Sumter FL-24 Hernando D40 FL-5 Orlando Orange Pasco Kissimmee FL-9 Osceola FL-11 Lakeland Tampa FL-15 Palm Bay Hillsborough Polk Brevard Pinellas FL-12 FL-10 Indian River Manatee Hardee FL-16 FL-13 Highlands Okeechobee St. Lucie FL-23 2008Sarasota Hammett & Edison, Inc.DeSoto 10 MI 0 10 20 30 40 50 60 70 100 80 60 40 20 0 KM 20 Coverage gained after DTV transition (no symbol) No change in coverage Coverage lost after DTV transition WACX Licensed TV Station WBCC · Analog Channel 68, DTV Channel 30 · Cocoa, FL Expected Change In Coverage: Licensed Operation Licensed (solid): 182 kW ERP at 491 m HAAT, Network: PBS vs. Analog (dashed): 2820 kW ERP at 287 m HAAT, Network: PBS Market: Orlando-Daytona Beach-Melbourne, FL FL-4 Bradford Clay St. Johns FL-6 Alachua Gainesville Putnam FL-3 FL-7 Flagler Levy FL-8 Marion Ocala Daytona Beach Volusia Lake Deltona Citrus Seminole Sumter FL-24 D30 Titusville Hernando FL-5 Orlando Orange Cocoa Pasco Kissimmee A68 FL-9 Osceola Lakeland FL-15 Palm Bay Hillsborough Polk Brevard FL-11 FL-12 Indian River Manatee Hardee FL-13 FL-16 Okeechobee Highlands St. -

Channel Lineup
Fox Hollow CUSTOMER SERVICE: 1-800-355-5668 Entertainment Channel Lineup 0 PBS 252 Lifetime 316 ShopHQ 2 WESH (NBC) 253 Lifetime Movie Network 327 CMT 6 WKMG (CBS) 254 American Movie Classics (AMC) 329 Black Entertainment Television (BET) 9 WFTV (ABC) 256 Turner Classic Movies (TCM) 331 MTV 15 WDSC (ETV) 259 Cinemoi 333 MTV2 18 WKCF (CW) 260 WE: Women's Entertainment 335 VH1 24 WUCF (PBS) 264 BBC America 340 AXSTV 26 WVEN (UNI) 265 A&E 345 RFD TV 27 WRDQ (IND) 269 History Channel 346 NASA TV 35 WOFL (FOX) 273 POP 348 Free Speech TV 43 WOTF (UMA) 275 QVC 350 CSPAN 1 45 WTGL (ETV) 276 National Geographic Channel 351 CSPAN 2 55 WACX (IND) 277 Travel Channel 353 Bloomberg Television 56 WOPX (ION) 278 Discovery Channel 355 CNBC 65 WRBW (MNT) 279 OWN 356 MSNBC 106 ESPN 3D (HD) 280 The Learning Channel 357 CNBC World 202 CNN 281 MotorTrend 360 Fox News Channel 204 Headline News 282 Animal Planet 361 Weather Nation 206 ESPN 285 Investigation Discovery (ID) 362 The Weather Channel 209 ESPN2 289 Disney Junior Channel 364 INSP 229 Home & Garden Television (HGTV) 290 Disney Channel (East) 365 GOD TV 231 Food Network 291 Disney Channel (West) 366 Jewish Life Television 233 GSN 292 Disney XD 367 World Harvest Television 236 E! Entertainment 293 BabyFirstTV 368 Hope 237 Bravo 296 Cartoon Network (East) 369 Daystar 238 ReelzChannel 297 Cartoon Network (West) 370 EWTN 239 Audience Network 299 Nickelodeon (East) 371 Church Channel 240 Home Shopping Network 300 Nickelodeon (West) 372 Trinity Broadcasting Network (TBN) 241 Paramount Network 301 Nick Jr. -

04-01-21 Arlington Ridge Service Guide
ARLINGTON RIDGE BULK COMMUNITY SERVICES VIDEO SERVICE Bulk Basic Cable Service, featuring over 229 channels • 1 HD-DVR Receiver • 1 HD Receiver FIBERNOW® INTERNET SERVICE Internet Service 100Mbps Symmetrical (Wireless Gateway Included) PREMIUM MOVIE PACKAGES UPGRADES: ONE PREMIUM MOVIE PACKAGE: $17.95/mo THREE PREMIUM MOVIE PACKAGES: $41.95/mo TWO PREMIUM MOVIE PACKAGES: $31.95/mo FOUR PREMIUM MOVIE PACKAGES: $51.95/mo INTERNET UPGRADES DIGITAL PHONE UPGRADES FIBERNOW EXTREME 250: $99.95 / mo PRIMARY CHOICE $26.95 / mo Internet Connection 250Mbps Full featured, including voicemail, unlimited long distance to North America, Puerto Rico, and Canada. FIBERNOW INTERNET 500: $149.95 / mo Digital Phone prices do not include: regulatory fees, E911 surcharges, or applicable taxes. Internet Connection 500Mbps FIBERNOW SUPERGIG: $249.95 / mo Internet Connection 1Gbps MONTHY EQUIPMENT RENTAL (Does not apply to included bulk STB’s) Additional taxes and fees may apply. Prices, Promotional Period, and Channels are subject to change without notice. For additional information please contact ADDITIONAL HD SET-TOP-BOX $7.95 / mo an OpticalTel representative at 1-855-30 FIBER (3-4237). ADDITIONAL HD-DVR SET-TOP-BOX $14.95 / mo * Digital Basic requires subscription to Full Basic TV. Additional equipment rental may be required for multiple TVs. Refundable deposit required on rental equipment. Digital Phone requires subscription to Internet service. Monthly charges do not include applicable overages, applicable taxes or fees. Channel lineup and rates are subject to change at any time. 1.855.303.4237 [email protected] www.opticaltel.com ARLINGTON RIDGE Channel Lineup WESH NBC SD 2 Hallmark SD 89 NBA HD 157 WRDQ HD 747 WACX4 SBN HD 761 WKMG CBS SD 4 GATE CAMERAS SD 90 WGN America HD 158 RTV HD 748 WACX Vida Vision HD 762 WRBW 65 UPN SD 5 Community Channel SD 91 ESPN News HD 159 WDSC 15 HD 749 WACX6 VICTORY HD 763 AD CHANNEL SD 7 WGN America SD 93 ESPNU HD 160 WDSC The Florida Ch. -
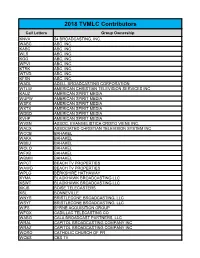
2018 TVMLC Contributors
2018 TVMLC Contributors Call Letters Group Ownership KNVA 54 BROADCASTING, INC. WABC ABC, INC. KABC ABC, INC. WLS ABC, INC. KGO ABC, INC. WPVI ABC, INC. KTRK ABC, INC. WTVD ABC, INC. KFSN ABC, INC. WADL ADELL BROADCASTING CORPORATION WTLW AMERICAN CHRISTIAN TELEVISION SERVICES INC KAUZ AMERICAN SPIRIT MEDIA WUPW AMERICAN SPIRIT MEDIA WSFX AMERICAN SPIRIT MEDIA WXTX AMERICAN SPIRIT MEDIA WDBD AMERICAN SPIRIT MEDIA KVHP AMERICAN SPIRIT MEDIA WVSN ASSOC. EVANGELISTICA CRISTO VIENE INC. WACX ASSOCIATED CHRISTIAN TELEVISION SYSTEM INC WCCB BAHAKEL WAKA BAHAKEL WBBJ BAHAKEL WOLO BAHAKEL WFXB BAHAKEL WBMM BAHAKEL WPCT BEACH TV PROPERTIES WAWD BEACH TV PROPERTIES WPLG BERKSHIRE HATHAWAY KYMA BLACKHAWK BROADCASTING LLC KSWT BLACKHAWK BROADCASTING LLC KKJB BOISE TELECASTERS KSL BONNEVILLE WNYS BRISTLECONE BROADCASTING, LLC WSYT BRISTLECONE BROADCASTING, LLC WIFS BYRNE ACQUISITION GROUP WFQX CADILLAC TELECASTING CO WABG CALA BROADCAST PARTNERS, LLC WRAL CAPITOL BROADCASTING COMPANY INC WRAZ CAPITOL BROADCASTING COMPANY INC WORO CATHOLIC CHURCH OF PR WCBS CBS TV KCBS CBS TV WBBM CBS TV KPIX CBS TV WBZ CBS TV KYW CBS TV KCAL CBS TV KCNC CBS TV WCCO CBS TV WJZ CBS TV KTVT CBS TV KOVR CBS TV KDKA CBS TV WFOR CBS TV KBCW CBS TV WSBK CBS TV WPSG CBS TV KSTW CBS TV KTXA CBS TV WKBD CBS TV WWJ CBS TV WUPA CBS TV WBFS CBS TV WTOG CBS TV KMAX CBS TV WLNY CBS TV WPCW CBS TV WGGN CHRISTIAN FAITH BROADCASTING WLLA CHRISTIAN FAITH BROADCASTING WISH CIRCLE CITY BROADCASTING INC WLNE CITADEL COMMUNICATIONS KLKN CITADEL COMMUNICATIONS WLOV COASTAL TELEVISION KTBY -

Spectrum TV Channel Lineup - January 2021
Spectrum TV Channel Lineup - January 2021 Chennel Network Chennel Network 2 WESH NBC 49 NBC Sports Network 3 WOR FOX 50 FS Florida 4 WRBW MyTV 51 Hallmark Channel 5 WUCF PBS 52 OWN 6 WKMG CBS 54 SEC Network 8 WKCF The CW 55 LMN 9 WFTV ABC 56 Travel Channel 10 WRDQ IND 57 Bravo 11 TNT 58 Golf Channel 12 TBS 59 Food Network 13 News Channel 13 60 truTV 14 WACX IND 61 HGTV 15 WGN America 62 WTMO | Telemundo 16 WOPX ION 63 IFC 17 WOTF UniMas 64 Oxygen 18 WVEN Univision 65 E! 19 WTGL IND 66 Comedy Central 21 Ovation 67 BET 22 WHLV TBN 68 Paramount Network 23 HLN 69 SYFY 24 CNN 70 FX 25 CNBC 71 CMT 26 msnbc 72 VH1 27 The Weather Channel 73 MTV 28 FOX News Channel 74 SundanceTV 29 ESPN 75 BBC America 30 ESPN2 76 Disney Junior 31 FS Sun 77 Disney XD 32 FOX Sports 1 78 Nicktoons 33 ESPNEWS 79 Freeform 34 Nickelodeon 80 GSN 35 Disney Channel 81 Discovery Family 36 Cartoon Network 82 Science Channel 37 WE tv 83 American Heroes Channel 38 TV Land 84 Investigation Discovery 39 USA Network 85 National Geographic 40 Lifetime 86 Smithsonian Channel 41 Discovery Channel 87 National Geographic Wild 42 A&E 88 Destination America 43 HISTORY 90 ACC Network 44 Animal Planet 95 fyi, 45 TLC 96 FXX 46 TCM 97 DIY Network 48 AMC 98 Pop 1 of 3 Spectrum TV Channel Lineup - January 2021 Chennel Network Chennel Network 99 Cooking Channel 184 GEM Shopping Network 100 MLB Network 185 Liquidation Channel 101 NFL Network 186 Shop Zeal 1 105 FOX Sports 2 187 LOVE 106 CBS Sports Network 188 Shop Zeal 3 107 Olympic Channel 189 Shop Zeal 4 108 NBA TV 190 Shop Zeal 5 109 ESPNU 191 Shop Zeal 6 112 Discovery Life Channel 192 FETV 115 ESPN Deportes 193 Shop Zeal 8 124 FOX Business Network 195 C-SPAN 125 CNBC World 196 C-SPAN2 126 Bloomberg Television 197 C-SPAN3 127 QVC 198 JBS Jewish Broadcasting Service 128 SHOPHQ 199 i24 130 BET Jams 203 Newsy 131 Boomerang 204 RFD-TV 133 Teen Nick 205 Cheddar 134 Nick Jr. -
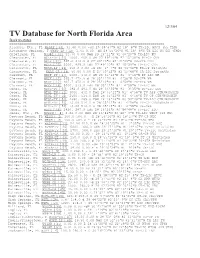
W9WI.Com Tiger Map Server Is Used to Create Maps
12/3/04 TV Database for North Florida Area Back to states =============================================================================== Alachua, Etc., FL W69AY [69] 31.40 0.00 -dH 29/39'47"N 82/18' 8"W TX-LIC WACX (55 TBN) Altamonte Springs, F WXXU-LP [12] 1.65 0.00 -dH 28/55'16"N 81/19' 9"W TX-LIC W07BZ (TMD) Chiefland, FL W33BL [33] 22.70 0.00 NdH 29/28'12"N 82/48'20"W TX-LIC FN Clearwater, FL WCLF-DT [21] 1000. 409.0 dH 27/49'10"N 82/15'39"W DT-CP CTN Clearwater, FL WCLF [21] 565.0 414.0 d 27/49'10"N 82/15'39"W DS-STA CTN Clearwater, FL WCLF [22] 5000. 409.0 ZdH 27/49'10"N 82/15'39"W TV-LIC CTN Clearwater, FL WXAX-LP [26] 150.0 0.00 -d 28/ 1' 7"N 82/36'32"W TX-CP Dream/As Clearwater, FL WXAX-CA [26] 50.00 0.00 Z 27/50'52"N 82/15'48"W CA-LIC Dream/As Clermont, FL WKCF-DT [17] 1000. 472.0 dH 28/35'12"N 81/ 4'58"W DT-LIC WB Clermont, FL WKCF [17] 595.7 472.0 d 28/35'12"N 81/ 4'58"W DS-STA WB Clermont, FL WKCF [17] 905.7 472.0 d 28/35'12"N 81/ 4'58"W DS-STA WB Clermont, FL WKCF [18] 5000. 513.0 -dH 28/35'12"N 81/ 4'58"W TV-LIC WB Cocoa, FL WBCC-DT [30] 182.0 491.0 dH 28/36'35"N 81/ 3'35"W DT-LIC EDU Cocoa, FL WTGL-TV [52] 3000. -

Television Stations 8/11/2018
Florida Broadcasters DB 1922-2015 TELEVISION STATIONS 8/11/2018 Date of Original License or 2015 call 2015 visual On Air Subsequent (*noncomm Virtual Designated Market DMA 2015 city of Original Original power Original City of Original (1/1/xx is Subsequent Visual Pwr ercial) ch 2015 licensee Area (DMA) Rank license call channel (rounded) License county Original licensee default) Subseqent Licensees Channel (rounded) Subsequent Call WACX-TV 40 Associated Christian Television Orlando-Daytona 19 Leesburg WIYE-TV 55 221kw Leesburg Orange Sharp Communications (H. 3/6/1982 Associated Christian Television 81kw 1982; WACX-TV 1988 System Beach-Melbourne James Sharp pres/GM) System acq 6/8/1983 5000kw 1986 WALA-TV 10 Meredith Corporation Mobile AL-Pensacola Mobile, AL WALA-TV 10 Mobile, AL W.O. Pape 1/14/1953 Record incomplete since licensed in Alabama; Meredith Corporation acq 12/17/14 WAMI-TV 69 Unimas Miami Miami-Ft. Lauderdale 16 Hollywood WYHS-TV 69 4786kw Hollywood Broward Channel 69 of Hollywood 8/10/1988 HSN Broadcasting of Hollywood 5000kw WAMI-TV 1998 (HSN Silverking Florida aka SKFL Broadcasting 1990 Broadcasting Company, Partnership (HSN Eddie L. Whitehead Communications aka Silver King pres/GM) Communications, Jeff McGrath pres, Eddie L. Whitehead VP/GM) acq 12/21/1988; Univision Partnership of Hollywood, Florida aka TeleFutura Miami aka Unimas Miami (Univision Communications, Jim Miller chmn/pres, Chuck Budt VP/GM) acq 6/6/2001 WAWD-TV 58 Beach TV Properties Mobile AL-Pensacola 61 Fort Walton Beach WAWD-TV 58 490kw Fort Walton Beach Okaloosa Rainbow 58 Broadcasting 7/1/1991 Rainbow 58 Broadcasting aka Dark 1998, (Wendell M.