The Security of Autonomous Driving: Threats, Defences, and Future
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2002 Nissan Xterra Owners Manual
The inside pages of this manual contain a minimum of 50% recycled fibers, Foreword including 10% post-consumer fibers. Welcome to the growing family of new NISSAN familiarity with controls and maintenance For descriptions specified for four-wheel owners. This vehicle has been delivered to you requirements, assisting you in the safe op- drive models, a mark is placed at with confidence. It was produced using the eration of your vehicle. the beginning of the applicable latest techniques and strict quality control. sections/items. This manual was prepared to help you under- WARNING As with other vehicles with features for stand the operation and maintenance of your IMPORTANT SAFETY INFORMATION vehicle so that you may enjoy many miles off-road use, failure to operate four- (kilometers) of driving pleasure. Please read REMINDERS FOR SAFETY! wheel drive models correctly may result through this manual before operating your in loss of control or an accident. Be sure vehicle. Follow these important driving rules to to read ‘‘Driving safety precautions’’ in help ensure a safe and complete trip for the ‘‘Starting and driving’’ section of this In the U.S., a separate Warranty Informa- you and your passengers! tion Booklet or in Canada, a Warranty and manual. Roadside Assistance Information Book- ² NEVER drive under the influence of let explains details about the warranties alcohol or drugs. ON-PAVEMENT AND OFF-ROAD DRIV- covering your vehicle. The “NISSAN Ser- ING vice and Maintenance Guide” explains ² ALWAYS observe posted speed lim- its and never drive too fast for con- This vehicle will handle and maneuver details about maintaining and servicing differently from an ordinary passenger your vehicle. -

Relay Attack Resistant Passive Keyless Entry Securing PKE Systems with Immobility Detection
DEGREE PROJECT IN MECHANICAL ENGINEERING, FIRST CYCLE, 15 CREDITS STOCKHOLM, SWEDEN 2020 Relay Attack Resistant Passive Keyless Entry Securing PKE Systems with Immobility Detection ABEL VALKO KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF INDUSTRIAL ENGINEERING AND MANAGEMENT Relay Attack Resistant Passive Keyless Entry ABEL VALKO Bachelor’s Thesis at ITM Supervisor and Examiner: Nihad Subasic TRITA-ITM-EX 2020:48 Abstract A significant security risk of modern vehicles is their vulner- ability to relay attacks, due to challenge-response methods, such as those employed in Passive Keyless Entry (PKE) used by most commercial cars, being inherently exposed. This class of attacks are where communication between a vehicle and its key is relayed by an attacker over long range - thereby bypassing any encryption and unlocking the ve- hicle without requiring direct access to the key. While a multitude of defenses have been proposed in recent years, many lack either robustness or practicality. Any viable sys- tem will likely have to rely on an environmental parameter which is not easily manipulated. Moreover, the system has to be: cost effective; easily implementable; and take user comfort, such as the key’s battery life, into account. This thesis implements and evaluates a PKE system re- sistant to relay attacks, analyses a multitude of proposed strategies in literature for feasibility, as well as suggests a novel method: Approach Curve Matching. It is concluded that the most promising strategies are: Immobility Detec- tion, Distance Bounding Protocols, and Approach Curve Matching - the first of which is chosen to be implemented in the prototype PKE system. The project develops a PKE system and implements the communication protocol using Bluetooth, as opposed to the conventional RFID. -

Sevice Munual for CHERY QQ6
Foreword ADVICE This Service Manual clearly defines the agreement between CHERY Automobile Co., Ltd. and its customers on the product quality assurance, and the establishment and termination of rights and bligations on after-sales service. Please carefully read this Service Manual before using the parts manufactured by the CHERY Company. Sevice Munual for CHERY QQ6 You are sincerely congratulated to be an owner of CHERY QQ6! Thank you for your belief for Chery Automobile Co., Ltd and your choice for Chery products! You will receive the high quality services from Chery Authorized Sales and Service Station whose employees have been trained well and specially. State-of-art technology offers CHERY QQ6 the excellent performance. Selecting CHERY QQ6 shows that you have very high requireements on the performance and style of a vehicle. Prior to using this car, please carefully read this service manual because the information hereto enables you to know how to properly manipulate and maintain this vehicle, and get the maximum enjoyable driving experience. This Service Manual is applied to the CHERY QQ6 only. Chery Automobile Co., LTD 1 Foreword This manualis compiled in accordance Important Declaration service station. with the structural features of QQ6 Before operating the products, please manufactured by CHERY Automobile Co., carefully read the Manual, which your Ltd.. This manual is applied to the QQ6. rights for enjoy services of warranty from In case that abnormality occurs to your This manual covers the latest information our corporation are lost due to the vehicle during the operation, it must be until it is printed. Chery Automobile Co., violation of the operational provisions. -

Fingerprint Identification Keyless Entry System
World Academy of Science, Engineering and Technology International Journal of Electronics and Communication Engineering Fingerprint Identification Vol:2, No:8, 2008 Keyless Entry System Chih-Neng Liang, Huang-Bin Huang, and Bo-Chiuan Chen palm print, voice, vein and multi-pattern identification. Abstract—Nowadays, keyless entry systems are widely adopted According to International Biometric Group (IBG) [3], for vehicle immobilizer systems due to both advantages of security and AFIS/Live-Scan accounts for the highest share in biometric convenience. Keyless entry systems could overcome brute-force key identification market in 2007 with 33.6%, followed by guessing attack, statistics attack and masquerade attack, however, fingerprint ID (25.3%), face profile 12.9%), intermediate they can't prevent from thieves stealing behavior. In this paper, we proposed a new architecture try to improve the existent flaws. The software (5.4%), iris ID (5.1%), palm print (4.7%), voice integration of the keyless entry system and the fingerprint (audio) (3.2%), vein patterns (3.0%), multi-pattern ID (2.9%) identification technology is more suitable to implement on the and other types of identification (4.0%). Among all, portable transponder to achieve higher security needs. We also adopt AFIS/Live-Scan and fingerprint ID account for 58.9% of all and modify AES security protocol for life expectancy and security of identification methods. It is clear that fingerprint ID has the portable transponder. In addition, the identification of a driver's become the mainstream of biometric identification. The reason fingerprint makes the service of automatic reinstatement of a driver's is that it costs less and requires less calculation compared to preferences become possible. -
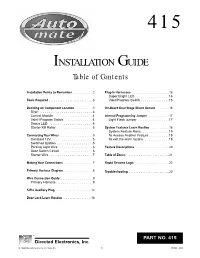
INSTALLATION GUIDE Table of Contents
415 INSTALLATION GUIDE Table of Contents Installation Points to Remember . .2 Plug-In Harnesses . .16 Super Bright LED . .16 Tools Required . .3 Valet/Program Switch . .16 Deciding on Component Location . .3 On-Board Dual Stage Shock Sensor . .16 Siren . 3 Control Module . 4 Internal Programming Jumper . .17 Valet®/Program Switch . 4 Light Flash Jumper . .17 Status LED . 4 Starter Kill Relay . 5 System Features Learn Routine . .18 System Feature Menu . .19 Connecting Your Wires . .5 To Access Another Feature . .19 Constant 12V . 5 To exit the learn routine . .19 Switched Ignition . .5 Parking Light Wire . 6 Feature Descriptions . 20 Door Switch Circuit . 6 Starter Wire . 7 Table of Zones . .21 Making Your Connections . .7 Rapid Resume Logic . .22 Primary Harness Diagram . .8 Troubleshooting . .22 Wire Connection Guide . .9 Primary Harness . .9 5-Pin Auxiliary Plug . .12 Door Lock Learn Routine . .16 ® PART NO. 415 Directed Electronics, Inc. © 1999 Directed Electronics, Inc. Vista, CA 1 N415A 2/99 Primary Control Module Harness Plug H1 514T Revenger 2-pin Soft Chirp micro siren LED plug Shock Sensor DRW-101 Adjustment 2-pin-mini blue valet/program plug 4-pin 5-pin optional auxiliary sensor plug plug Also Included: Plug-in Status LED Plug in Valet/program switch Primary Harness (H1) 5-Pin Auxiliary Harness Pre-wired Starter Kill Relay INSTALLATION POINTS TO REMEMBER Before beginning the installation: • Check with the customer on Status LED location. • Use seat and fender covers to protect the vehicle. • Remove the domelight fuse. This prevents accidentally draining the battery. • Roll down a window to avoid being locked out of the car. -

Marelli Aims for Big Boost from China Bosch Foresees Large
AN_070820_14.qxd.ps 10.08.2007 17:46 Uhr Page 14 PAGE 14 · www.autonewseurope.com August 20, 2007 Car Cutaway ZF gets the new Alfa Romeo Spider ready for any weather Numerous suppliers help with the new Alfa Romeo Spider’s power- Spider is mainly equipped (uptake expected to be well above 90 per- those transmissions. Italy’s Mazzucconi casts and fully assembles the train. ZF Friedrichshafen contributes the axle, angle drives, differential cent) with the F40 and M20/32 six-speed manual transmissions from 2.4-liter turbodiesel’s cylinder heads. and propshaft for the premium roadster’s four-wheel-drive system, GM Powertrain Europe, which is based in Turin. Swiss supplier Hoer- which it supplies from its plants in Gotha and Thyrnau, Germany. The biger Antriebstechnik delivers the majority of synchronizer systems to Steven Wingett OIL PUMP: OIL AND FUEL FILTERS: GASKETS: WATER HOSES: ANTI-FRICTION BEARINGS: SYNCHRONIZER COMPONENTS: TECHNICAL ADHESIVE TAPES: OVERHEAD CONSOLE SWITCH BANK: SUNVISORS: SEAT PLASTIC TRIMMING PROFILES: MAGNA POWERTRAIN UFI FILTERS FEDERAL-MOGUL HUTCHINSON INA NEUMAYER TEKFOR HOLDING SCAPA METHODE ELECTRONICS AUTOMOTIVE GROUP SATURNO GALLINA CYLINDER HEAD: SELF ADHESIVE LABELS: MAZZUCCONI GROUP AVERY DENNISON OIL COOLER: MODINE EUROPE PASSENGER AIRBAG MODULE: TRW AUTOMOTIVE ENGINE SEALS: FREUDENBERG-DS NAVIGATION SYSTEM: MAGNETI MARELLI TIMING BELTS: DAYCO EUROPE MAIN FLOOR CARPET: CYLINDER HEAD GASKETS: RIETER ELRINGKLINGER REMOTE KEYLESS SYSTEM: DIAPHRAGMS: GIOBERT CONTITECH CONROD: CD/MP3 RADIO: MAHLE ROBERT BOSCH -

Ssangyong-Actyon-Sports-2013-INT
New Actyon Sports Delivers More Power A new, more powerful engine, dynamic styling and better fuel efficiency are all yours with this exciting SUT from Ssangyong Motor. New Actyon Sports is equipped to boost your performance at work and at play. And More Fun The great utility, comfort and versatility of New Actyon Sports bring greater enjoyment to your leisure. That translates into a better quality of life. This New Look Sets a New Standard New Actyon Sports lets you stand apart from the crowd in any environment. The sharp front hood character line, hexagonal radiator grille and chic black bezel blend dynamism with refinement. Wide and straightforward character lines on the hood elicit stateliness and charismatic appeal, accentuated by the mesh radiator grille finished in chrome high-gloss black. Fog lamps and daytime running lamps are standard. All the controls are oriented toward the driver, and the switches are grouped by function to facilitate their location by the driver. The gauge cluster has six illumination settings for optimal visibility day and night, and energy-efficient LEDs that make the gauges easy to read at a glance. The center fascia is now black, providing a refined and progressive appearance. In addition, the air vents and digital clock have been redesigned for greater ease of operability. The Spruced-up Driver’s Space Offers Lots of Extras The new trip computer in the gauge cluster tracks your travel distance, travel time and fuel consumption, while the speed-sensitive power steering system self-adjusts the amount of steering assist necessary to enhance driving stability and control at any speed. -
AM1 Security System Installation Guide
AM1AM1 Security System installation guide © 2005 Directed Electronics, Inc. Vista, CA N427A 01-05 NOTE: This product is intended for installation by a professional installer only! Any attempt to install this product by any person other than a trained professional may result in severe damage to a vehicle’s electrical system and components. trademarks and copyrights Bitwriter®, Clifford®, Code-Hopping®, Directed®, Doubleguard®, ESP®, FailSafe®, Ghost Switch®, Learn Routine™, Nite-Lite®, Nuisance Prevention®, NPC®, Revenger®, Silent Mode™, Soft Chirp®, Stealth Coding™, Stinger®, Valet®, Vehicle Recovery System™, VRS™, and Warn Away® are all Trademarks or Registered Trademarks of Directed Electronics, Inc. contents what is included . .3 four-pin optional sensor harness .21 control module . .3 RED wire . .21 BLACK wire . .21 installation points to remember . .3 BLUE, GREEN wires . .21 before beginning the installation: 4 after the install: . .4 dealer master control loop . .21 tools required . .4 door lock learn routine . .21 to learn lock: . .22 deciding on component location . .5 to learn unlock: . .22 control module . .5 to exit the learn routine: . .23 integrated LED/Valet® switch . .6 starter kill relay . .6 on-board dual stage shock sensor 23 connecting your wires . .6 internal programming jumper . .24 obtaining constant 12V . .6 zones . .24 finding the 12V switched . long term event history . .25 ignition wire . .7 rapid resume logic . .25 finding the door pin switch circuit 9 feature programming . .26 main harness wire . to enter feature programming . connection guide . .10 routine . .26 main harness wiring diagram . .10 once a feature is programmed . .27 main harness wiring guide . .10 accessing another feature . .27 auxiliary harness wire . -

Smart Lock –A Milestone for Robeers
International Journal of Engineering Science Invention Research & Development; Vol. III, Issue IX, March 2017 www.ijesird.com, e-ISSN: 2349-6185 SMART LOCK –A MILESTONE FOR ROBEERS Ishwarya Niranjana.M.1, Manonmani.G.2, Suganya.D.3, Poorani.G.4 1Assistant Professor(ECE), 2,3,4 UG student (ECE), Pollachi Institute of Engineering and Technology, Poosaripatti 1 [email protected], [email protected] Abstract: Currently most of the public having own vehicle, theft is happening on parking. The safety of a vehicle is extremely II. RELATED WORK essential for public vehicles. The development of technology in the field of electronics has brought a drastic change in everyday In [2], the hardware and software of the GPS life. The proposed systems consist of a digital keypad to provide password authorization to lock vehicles.It alerts the owner about and GSM network were developed. The proposed the theft and allows the user to control the system removed by GPS/GSM based System has the two parts, first is a SMS. It also provides tracking of vehicle using GPS and servo mobile unit and another is controlling station. The motor operating locking system (fuel lock, handle lock and rear lock).This system is compatible with all branded vehicles. system processes, interfaces, connections, data transmission and reception of data among the Keywords: GSM Technology, Vehicle tracking, Microcontroller, mobile unit and control stations are working Short message services, Locking system. successfully. These results are compatible with GPS technologies. I. INTRODUCTION The traditional security systems as priced low, This is based on “GSM control system” to but they merely act as an alarm system and are no construct a control system that implements the match to the well equipped thief. -
Biometric Automobile Ignition Locking System
International Journal of Electronics and Communication Engineering and Technology (IJECET) Volume 7, Issue 5, September-October 2016, pp. 28–37, Article ID: IJECET_07_05_004 Available online at http://iaeme.com/Home/issue/IJECET?Volume=7&Issue=5 Journal Impact Factor (2016): 8.2691 (Calculated by GISI) www.jifactor.com ISSN Print: 0976-6464 and ISSN Online: 0976-6472 © IAEME Publication BIOMETRIC AUTOMOBILE IGNITION LOCKING SYSTEM R.M.Vithlani Assistant Professor, Department of Electronics, Saurashtra University, Rajkot Sagar Shingala Engineer, UFO Moviez India Ltd., Rajkot Dr. H.N.Pandya Professor and HOD, Department of Electronics, Saurashtra University, Rajkot ABSTRACT Automobile theft is the biggest problem in the remote location of the city and neither key lock nor Remote keyless system provides reliable solution because key can be copied very easily and remote keyless system encrypted data use radio waves which can be recorded and used to unlock the car. To design a unique key which doesn’t rely on key or radio wave, biometric solution is the only better option. Our purpose here is to provide biometric solution with very low cost hardware and using open source hardware and software tool plus does it your self-installation. Key words: Automobile theft security, automobile ignition control, open source hardware and software, do it your self-installation. Cite this Article: R.M.Vithlani, Sagar Shingala and Dr. H.N.Pandya, Biometric Automobile Ignition Locking System, International Journal of Electronics and Communication Engineering and Technology, 7(5), 2016, pp. 28–37. http://iaeme.com/Home/issue/IJECET?Volume=7&Issue=5 1. INTRODUCTION Every person has its own unique fingerprint which can be used as unique unlock/lock key of your automobile. -

Hybrid Pipeline Hardware Architecture Based on Error Detection and Correction for AES
sensors Article Hybrid Pipeline Hardware Architecture Based on Error Detection and Correction for AES Ignacio Algredo-Badillo 1,† , Kelsey A. Ramírez-Gutiérrez 1,† , Luis Alberto Morales-Rosales 2,* , Daniel Pacheco Bautista 3,† and Claudia Feregrino-Uribe 4,† 1 CONACYT-Instituto Nacional de Astrofísica, Óptica y Electrónica, Puebla 72840, Mexico; [email protected] (I.A.-B.); [email protected] (K.A.R.-G.) 2 Faculty of Civil Engineering, CONACYT-Universidad Michoacana de San Nicolás de Hidalgo, Morelia 58000, Mexico 3 Departamento de Ingeniería en Computación, Universidad del Istmo, Campus Tehuantepec, Oaxaca 70760, Mexico; [email protected] 4 Instituto Nacional de Astrofísica, Óptica y Electrónica, Puebla 72840, Mexico; [email protected] * Correspondence: [email protected] † These authors contributed equally to this work. Abstract: Currently, cryptographic algorithms are widely applied to communications systems to guarantee data security. For instance, in an emerging automotive environment where connectivity is a core part of autonomous and connected cars, it is essential to guarantee secure communications both inside and outside the vehicle. The AES algorithm has been widely applied to protect communications in onboard networks and outside the vehicle. Hardware implementations use techniques such as iterative, parallel, unrolled, and pipeline architectures. Nevertheless, the use of AES does not Citation: Algredo-Badillo, I.; guarantee secure communication, because previous works have proved that implementations of secret Ramírez-Gutiérrez, K.A.; key cryptosystems, such as AES, in hardware are sensitive to differential fault analysis. Moreover, Morales-Rosales, L.A.; Pacheco it has been demonstrated that even a single fault during encryption or decryption could cause Bautista, D.; Feregrino-Uribe, C. -

Ssangyong-Actyon-2013-INT.Pdf
FASHIONABLE, FLEXIBLE AND FUN This coupe-like SUV lets you do more in style and comfort. A BOLD STATEMENT OF INDIVIDUALITY A hatchback has been incorporated into the body of a small SUV to create an unmistakable appearance. The luxurious, modern look of this cross-over SUV sets you apart from the urban crowd. VIGOROUS AND STYLISH OUTSIDE The front has been made over for a bolder look with sharply a protruding bonnet character line, mesh radiator grille and sporty black bezel headlamps. The sports coupe silhouette has been enhanced with chrome-accented waist-line molding and chrome side repeater. The wedge-shaped profile in the rear is reminiscent of a sports car, while the tail lamps naturally continue the side character lines for a graceful, uncomplicated rear view. Tail lamp assembly Headlamps Radiator grille Full-bodied bonnet character line RELAXING AND SPORTY INSIDE The Actyon redefines the meaning of “Sports Utility”. The black tone accentuated with chrome projects the feeling of speed, enhancing the sporty feel of this coupe-like SUV. The interior not only looks great but is laid out for easy operability. The steering wheel is covered in leather, is heated and power-tilts. Bluetooth switches mounted on the steering wheel enable the driver to operate the audio system more easily and stay focused on the road. The centre fascia and monitor are slanted toward the driver, and the switches are arrayed in the driver’s direction. A trip computer in the centre of the LED cluster keeps tabs on distance travelled, average speed, and fuel consumption.