Nutational Damping Times in Solids of Revolution
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

14 Mass on a Spring and Other Systems Described by Linear ODE
14 Mass on a spring and other systems described by linear ODE 14.1 Mass on a spring Consider a mass hanging on a spring (see the figure). The position of the mass in uniquely defined by one coordinate x(t) along the x-axis, whose direction is chosen to be along the direction of the force of gravity. Note that if this mass is in an equilibrium, then the string is stretched, say by amount s units. The origin of x-axis is taken that point of the mass at rest. Figure 1: Mechanical system “mass on a spring” We know that the movement of the mass is determined by the second Newton’s law, that can be stated (for our particular one-dimensional case) as ma = Fi, X where m is the mass of the object, a is the acceleration, which, as we know from Calculus, is the second derivative of the displacement x(t), a =x ¨, and Fi is the net force applied. What we know about the net force? This has to include the gravity, of course: F1 = mg, where g is the acceleration 2 P due to gravity (g 9.8 m/s in metric units). The restoring force of the spring is governed by Hooke’s ≈ law, which says that the restoring force in the opposite to the movement direction is proportional to the distance stretched: F2 = k(s + x), here minus signifies that the force is acting in the opposite − direction, and the distance stretched also includes s units. Note that at the equilibrium (i.e., when x = 0) and absence of other forces we have F1 + F2 = 0 and hence mg ks = 0 (this last expression − often allows to find the spring constant k given the amount of s the spring is stretched by the mass m). -

Vibration and Sound Damping in Polymers
GENERAL ARTICLE Vibration and Sound Damping in Polymers V G Geethamma, R Asaletha, Nandakumar Kalarikkal and Sabu Thomas Excessive vibrations or loud sounds cause deafness or reduced efficiency of people, wastage of energy and fatigue failure of machines/structures. Hence, unwanted vibrations need to be dampened. This article describes the transmis- sion of vibrations/sound through different materials such as metals and polymers. Viscoelasticity and glass transition are two important factors which influence the vibration damping of polymers. Among polymers, rubbers exhibit greater damping capability compared to plastics. Rubbers 1 V G Geethamma is at the reduce vibration and sound whereas metals radiate sound. Mahatma Gandhi Univer- sity, Kerala. Her research The damping property of rubbers is utilized in products like interests include plastics vibration damper, shock absorber, bridge bearing, seismic and rubber composites, and soft lithograpy. absorber, etc. 2R Asaletha is at the Cochin University of Sound is created by the pressure fluctuations in the medium due Science and Technology. to vibration (oscillation) of an object. Vibration is a desirable Her research topic is NR/PS blend- phenomenon as it originates sound. But, continuous vibration is compatibilization studies. harmful to machines and structures since it results in wastage of 3Nandakumar Kalarikkal is energy and causes fatigue failure. Sometimes vibration is a at the Mahatma Gandhi nuisance as it creates noise, and exposure to loud sound causes University, Kerala. His research interests include deafness or reduced efficiency of people. So it is essential to nonlinear optics, synthesis, reduce excessive vibrations and sound. characterization and applications of nano- multiferroics, nano- We can imagine how noisy and irritating it would be to pull a steel semiconductors, nano- chair along the floor. -

Leonhard Euler - Wikipedia, the Free Encyclopedia Page 1 of 14
Leonhard Euler - Wikipedia, the free encyclopedia Page 1 of 14 Leonhard Euler From Wikipedia, the free encyclopedia Leonhard Euler ( German pronunciation: [l]; English Leonhard Euler approximation, "Oiler" [1] 15 April 1707 – 18 September 1783) was a pioneering Swiss mathematician and physicist. He made important discoveries in fields as diverse as infinitesimal calculus and graph theory. He also introduced much of the modern mathematical terminology and notation, particularly for mathematical analysis, such as the notion of a mathematical function.[2] He is also renowned for his work in mechanics, fluid dynamics, optics, and astronomy. Euler spent most of his adult life in St. Petersburg, Russia, and in Berlin, Prussia. He is considered to be the preeminent mathematician of the 18th century, and one of the greatest of all time. He is also one of the most prolific mathematicians ever; his collected works fill 60–80 quarto volumes. [3] A statement attributed to Pierre-Simon Laplace expresses Euler's influence on mathematics: "Read Euler, read Euler, he is our teacher in all things," which has also been translated as "Read Portrait by Emanuel Handmann 1756(?) Euler, read Euler, he is the master of us all." [4] Born 15 April 1707 Euler was featured on the sixth series of the Swiss 10- Basel, Switzerland franc banknote and on numerous Swiss, German, and Died Russian postage stamps. The asteroid 2002 Euler was 18 September 1783 (aged 76) named in his honor. He is also commemorated by the [OS: 7 September 1783] Lutheran Church on their Calendar of Saints on 24 St. Petersburg, Russia May – he was a devout Christian (and believer in Residence Prussia, Russia biblical inerrancy) who wrote apologetics and argued Switzerland [5] forcefully against the prominent atheists of his time. -

Notes on the Critically Damped Harmonic Oscillator Physics 2BL - David Kleinfeld
Notes on the Critically Damped Harmonic Oscillator Physics 2BL - David Kleinfeld We often have to build an electrical or mechanical device. An understand- ing of physics may help in the design and tuning of such a device. Here, we consider a critically damped spring oscillator as a model design for the shock absorber of a car. We consider a mass, denoted m, that is connected to a spring with spring constant k, so that the restoring force is F =-kx, and which moves in a lossy manner so that the frictional force is F =-bv =-bx˙. Prof. Newton tells us that F = mx¨ = −kx − bx˙ (1) Thus k b x¨ + x + x˙ = 0 (2) m m The two reduced constants are the natural frequency k ω = (3) 0 m and the decay constant b α = (4) m so that we need to consider 2 x¨ + ω0x + αx˙ = 0 (5) The above equation describes simple harmonic motion with loss. It is dis- cussed in lots of text books, but I want to consider a formulation of the solution that is most natural for critical damping. We know that when the damping constant is zero, i.e., α = 0, the solution 2 ofx ¨ + ω0x = 0 is given by: − x(t)=Ae+iω0t + Be iω0t (6) where A and B are constants that are found from the initial conditions, i.e., x(0) andx ˙(0). In a nut shell, the system oscillates forever. 1 We know that when the the natural frequency is zero, i.e., ω0 = 0, the solution ofx ¨ + αx˙ = 0 is given by: x˙(t)=Ae−αt (7) and 1 − e−αt x(t)=A + B (8) α where A and B are constants that are found from the initial conditions. -

Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS
energies Article Low Frequency Damping Control for Power Electronics-Based AC Grid Using Inverters with Built-In PSS Ming Yang 1, Wu Cao 1,*, Tingjun Lin 1, Jianfeng Zhao 1 and Wei Li 2 1 School of Electrical Engineering, Southeast University, Nanjing 210096, China; [email protected] (M.Y.); [email protected] (T.L.); [email protected] (J.Z.) 2 NARI Group Corporation (State Grid Electric Power Research Institute), Nanjing 211106, China; [email protected] * Correspondence: [email protected] Abstract: Low frequency oscillations are the most easily occurring dynamic stability problem in the power system. With the increasing capacity of power electronic equipment, the coupling coordination of a synchronous generator and inverter in a low frequency range is worth to be studied further. This paper analyzes the mechanism of the interaction between a normal active/reactive power control grid-connected inverters and power regulation of a synchronous generator. Based on the mechanism, the power system stabilizer built in the inverter is used to increase damping in low frequency range. The small-signal model for electromagnetic torque interaction between the grid-connected inverters and the generator is analyzed first. The small-signal model is the basis for the inverters to provide damping with specific amplitude and phase. The additional damping torque control of the inverters is realized through a built-in power system stabilizer. The fundamentals and the structure of a built-in power system stabilizer are illustrated. The built-in power system stabilizer can be realized through the active or reactive power control loop. -
Tuned Mass Damper Systems
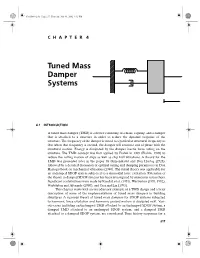
ConCh04v2.fm Page 217 Thursday, July 11, 2002 4:33 PM C H A PT E R 4 Tuned Mass Damper Systems 4.1 INTRODUCTION A tuned mass damper (TMD) is a device consisting of a mass, a spring, and a damper that is attached to a structure in order to reduce the dynamic response of the structure. The frequency of the damper is tuned to a particular structural frequency so that when that frequency is excited, the damper will resonate out of phase with the structural motion. Energy is dissipated by the damper inertia force acting on the structure. The TMD concept was first applied by Frahm in 1909 (Frahm, 1909) to reduce the rolling motion of ships as well as ship hull vibrations. A theory for the TMD was presented later in the paper by Ormondroyd and Den Hartog (1928), followed by a detailed discussion of optimal tuning and damping parameters in Den Hartog’s book on mechanical vibrations (1940). The initial theory was applicable for an undamped SDOF system subjected to a sinusoidal force excitation. Extension of the theory to damped SDOF systems has been investigated by numerous researchers. Significant contributions were made by Randall et al. (1981), Warburton (1981, 1982), Warburton and Ayorinde (1980), and Tsai and Lin (1993). This chapter starts with an introductory example of a TMD design and a brief description of some of the implementations of tuned mass dampers in building structures. A rigorous theory of tuned mass dampers for SDOF systems subjected to harmonic force excitation and harmonic ground motion is discussed next. -

Teaching the Difference Between Stiffness and Damping
LECTURE NOTES « Teaching the Difference Between Stiffness and Damping Henry C. FU and Kam K. Leang In contrast to the parallel spring-mass-damper, in the necessary step in the design of an effective control system series mass-spring-damper system the stiffer the system, A is to understand its dynamics. It is not uncommon for a the more dissipative its behavior, and the softer the sys- well-trained control engineer to use such an understanding to tem, the more elastic its behavior. Thus teaching systems redesign the system to become easier to control, which requires modeled by series mass-spring-damper systems allows an even deeper understanding of how the components of a students to appreciate the difference between stiffness and system influence its overall dynamics. In this issue Henry C. damping. Fu and Kam K. Leang discuss the diff erence between stiffness To get students to consider the difference between soft and damping when understanding the dynamics of mechanical and damped, ask them to consider the following scenario: systems. suppose a bullfrog is jumping to land on a very slippery floating lily pad as illustrated in Figure 2 and does not want to fall off. The frog intends to hit the flower (but he simple spring, mass, and damper system is ubiq- cannot hold onto it) in the center to come to a stop. If the uitous in dynamic systems and controls courses [1]. TThis column considers a concept students often have trouble with: the difference between a “soft” system, which has a small elastic restoring force, and a “damped” system, x c which dissipates energy quickly. -

Fig 8.4.1 Coulomb Friction Consider Two Dry Sliding Surfaces with a Normal Reaction R Between Them
Module 8 : Free Vibration with Viscous Damping; Critical Damping and Aperiodic Motion; Logarithmic Decrement;Systems with Coulomb Damping. Lecture 20 : Systems with Coulomb Damping. Objectives In this lecture you will learn the following Damping effect due to friction and its characteristics. Solution of equation of motion for frictional damping. Frictionally damped natural frequency. Dry friction or Coloumb Damping:This type of damping occurs when two machine parts rub against each other, dry or unlubricated. The dry friction is a complex phenomenon and there are several theories about the mechanism of dry friction. A typical dry friction characteristic is as shown in Fig 8.4.1. This form of damping brings in non-linearities and the mathematical model of the system becomes non-linear . Non-linear dynamical systems can exhibit very complex behavior and detailed analysis of such systems is beyond the scope of our present discussion. Interested readers can refer to advanced reference material . Fig 8.4.1 Coulomb Friction Consider two dry sliding surfaces with a normal reaction R between them. Then the force of friction acting on each of the two mating surfaces is given by: where is defined as the coefficient of friction between the two mating surfaces. For ideally smooth surfaces, dry friction coefficient is independent of velocity. For rough surfaces, dry friction cofficient decreases somewhat initially with increase in velocity and finally is constant through out. For lubricated surfaces, is approximately proportional to velocity giving approxiamtely viscous damping. The aspects we are intrested here regarding free vibration with Coulomb damping are: The frequency of damped oscillations. -

MOMENT of INERTIA and DAMPING of LIQUIDS in BAFFLED CYLINDRICAL TANKS by Franklin T
, ,- .. *., a I' k NASA CONTRACTOR REPORT MOMENT OF INERTIA AND DAMPING OF LIQUIDS IN BAFFLED CYLINDRICAL TANKS by Franklin T. Dodge and Daniel D. Kana Prepared under Contract No. NAS 8-1555 by SOUTHWEST RESEARCH INSTITUTE San Antonio, Texas for George C. Marshall Space Flight Center , -. ,. !... '.:I NATIONALAERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. F~BRu~RY..:l;9~6 ..., ...>,. j.2 I NASA CR-383 MOMENT OF INERTIA AND DAMPING OF LIQUIDS IN BAFFLED CYLINDRICAL TANKS By Franklin T. Dodge and Daniel D. Kana Distribution of this report is provided in the interest of informationexchange. Responsibility for the contents resides in the author or organization that prepared it. Prepared under Contract No. NAS 8-1555 by SOUTHWEST RESEARCH INSTITUTE San Antonio, Texas for George C. Marshall Space Flight Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION For sale by the Clearinghouse for Federal Scientific and Technical Information Springfield, Virginia 22151 - Price $2.00 ABSTRACT The moment of inertia and the damping of a liquid in a completely filled, closed cylindrical tank is investigated experimentally for tanks wit11 and without baffles. The results are compared with Bauer's mechanical model, and it is shown that a simpler model, which, however, is not con- ceptually correct for extremely large damping, is sufficient for cases where only small damping is expected. An approximate method of computing the liquid moment of inertia in a baffled tank is given. .. 11 TABLE OF CONTENTS Page .” - LIST OF FIGURES iv LIST OF TABLES iv -

Leonhard Euler and the Koenigsberg Bridges
LEONHARD EULER AND THE KOENIGSBERG BRIDGES In a proble!ll that entertained the strollers of an East "0- Prussjan city the great mathematician sa,v an illlportant principle of the branch of mathen1atics called topology Leonhard Euler, the most eminent of Switzerland's scien changes of its size or shape. The Koenigsberg puzzle is a so tists, was a gifted 18th-century mathematician who enriched called network problem in topology. mathematics in almost every department and whose energy In the town of Koenigsberg (where the philosopher Im was at least as remarkable as his genius. "Euler calculated manuel Kant was born) there were in the 18th century seven t without apparent effor , as men breathe, or as eagles sustain bridges which crossed the river Pre gel. They connected two themselves in the wind," wrote Frall(,ois Arago, the French islands in the river with each other and with the opposite astronomer and physicist. It is said that Euler "dashed off banks. The townsfolk had long amused themselves with this memoirs in the half-hour between the first and second calls problem: Is it possible to cross the seven bridges in a con to dinner." According to the mathematical historian Eric tinuous walk without recrossing any of them? When the puz Temple Bell he "would often compose his memoirs with a zle came to Euler's attention, he recognized that an important baby in his lap while the older children played all about scientific principle lay concealed in it. He applied himself to him"-the number of Euler's children was 13. -
Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University
Montclair State University Montclair State University Digital Commons Theses, Dissertations and Culminating Projects 1-2019 Least Action Principle Applied to a Non-Linear Damped Pendulum Katherine Rhodes Montclair State University Follow this and additional works at: https://digitalcommons.montclair.edu/etd Part of the Applied Mathematics Commons Recommended Citation Rhodes, Katherine, "Least Action Principle Applied to a Non-Linear Damped Pendulum" (2019). Theses, Dissertations and Culminating Projects. 229. https://digitalcommons.montclair.edu/etd/229 This Thesis is brought to you for free and open access by Montclair State University Digital Commons. It has been accepted for inclusion in Theses, Dissertations and Culminating Projects by an authorized administrator of Montclair State University Digital Commons. For more information, please contact [email protected]. Abstract The principle of least action is a variational principle that states an object will always take the path of least action as compared to any other conceivable path. This principle can be used to derive the equations of motion of many systems, and therefore provides a unifying equation that has been applied in many fields of physics and mathematics. Hamilton’s formulation of the principle of least action typically only accounts for conservative forces, but can be reformulated to include non-conservative forces such as friction. However, it can be shown that with large values of damping, the object will no longer take the path of least action. Through numerical -

Leonhard Euler and the Theory of Ships
Leonhard Euler and the Theory of Ships Horst Nowacki, Berlin Abstract On April 15, 2007 the scientific world has commemorated Leonhard Euler’s 300th birthday. Euler’s eminent work has become famous in many fields: Mathematics, mechanics, optics, acoustics, astronomy and geodesy, even in the theory of music. This article will recall his no less distinguished contributions to the founding of the modern theory of ships. These are not so widely known to the general professional public. In laying these foundations in ship theory like in other fields Euler was seeking “first principles, generality, order and above all clarity”. This article will highlight those achievements for which we owe him our gratitude. There is no doubt that Leonhard Euler was one of the founders of the modern theory of ships. He raised many fundamental questions for the first time and through all phases of his professional lifetime devoted himself to subjects of ship theory. Thereby he gave a unique profile to this still nascent scientific discipline. Many of his approaches have been of lasting, incisive influence on the structure of this field. Some of his ideas have become so much a matter of routine today that we have forgotten their descent from Euler. This article will synoptically review Euler’s contributions to the foundation of this discipline, will correlate them with the stages of Euler’s own scientific development, embedded in the rich environment of scientific enlightenment in the 18th c., and will appreciate the value of his lasting aftereffects until today. The same example will serve to recognize the fertile field of tension always existing between Euler’s fundamental orientation and his desire to make contributions to practical applications, which has remained characteristic of ship theory to the present day.