Radiometric Actuators for Spacecraft Attitude Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

30. Electromagnetic Waves and Optics
30. Electromagnetic waves and optics www.ariel.ac.il Ԧ 1 푊 Power per unit area and points Poynting vector: 푆 = 퐸 × 퐵 has units [ 2] 휇0 푚 in the direction of propagation 1 푆Ԧ = 퐸 × 퐵 휇0 퐸 퐸 퐵 푆Ԧ http://www.ariel.ac.il/ 퐵 푆Ԧ Intensity is time averaged norm of Poynting vector: 1 푇 퐼 = 푆 = 푆Ԧ 푑푡 푎푣 푇 0 퐸 푥, 푡 = 퐸 cos 푘푥 − 휔푡 푦 0 1 푆Ԧ = 퐸 × 퐵 퐸0 휇 퐵 푥, 푡 = cos 푘푥 − 휔푡 0 푧 푐 Intensity is time averaged norm of Poynting vector: 2 1 푇 Ԧ 퐸0 푇 2 퐼 = 푆푎푣 = 푆 푑푡 = cos 푘푥 − 휔푡 푑푡 푇 0 푐휇0 0 퐸 푥, 푡 = 퐸 cos 푘푥 − 휔푡 푦 0 1 푆Ԧ = 퐸 × 퐵 퐸0 휇 퐵 푥, 푡 = cos 푘푥 − 휔푡 0 푧 푐 Intensity is time averaged norm of Poynting vector: 푇 푇 1 퐸2 퐸2 푐퐵2 Ԧ 0 2 0 0 푊 퐼 = 푆푎푣 = න 푆 푑푡 = න cos 푘푥 − 휔푡 푑푡 = = units [ ൗ 2] 푇 푐휇0 2푐휇0 2휇0 푚 0 0 1 2 1 1 2 Energy density 푢 = 휀표퐸 + 퐵 2 2 휇0 퐸푦 푥, 푡 = 퐸0cos 푘푥 − 휔푡 퐸 Electric field Magnetic field 0 퐵푧 푥, 푡 = cos 푘푥 − 휔푡 energy density energy density 푐 1 2 1 1 2 2 Energy density 푢 = 휀표퐸 + 퐵 = 휀표퐸 2 2 휇0 퐸푦 푥, 푡 = 퐸0cos 푘푥 − 휔푡 퐸 Electric field Magnetic field 0 퐵푧 푥, 푡 = cos 푘푥 − 휔푡 energy density energy density 푐 퐸 (퐵 = = 휀 휇 퐸) 푐 표 0 1 2 1 1 2 2 Energy density 푢 = 휀표퐸 + 퐵 = 휀표퐸 2 2 휇0 퐸푦 푥, 푡 = 퐸0cos 푘푥 − 휔푡 퐸 Electric field Magnetic field 0 퐵푧 푥, 푡 = cos 푘푥 − 휔푡 energy density energy density 푐 1 푇 1 Average energy density 푢 = 휀 퐸2푑푡 = 휀 퐸2 푎푣 푇 0 표 2 표 0 1 2 1 1 2 2 Energy density 푢 = 휀표퐸 + 퐵 = 휀표퐸 2 2 휇0 퐸푦 푥, 푡 = 퐸0cos 푘푥 − 휔푡 퐸 Electric field Magnetic field 0 퐵푧 푥, 푡 = cos 푘푥 − 휔푡 energy density energy density 푐 2 1 푇 2 1 2 퐸0 ( = Average energy density 푢푎푣 = 휀표퐸 푑푡 = 휀표퐸0 = 휀표휇0푐퐼 (Intensity = 퐼 푇 0 2 2푐휇0 퐼 퐽 푢 = units: -

HISTORY Nuclear Medicine Begins with a Boa Constrictor
HISTORY Nuclear Medicine Begins with a Boa Constrictor Marshal! Brucer J Nucl Med 19: 581-598, 1978 In the beginning, a boa constrictor defecated in and then analyzed the insoluble precipitate. Just as London and the subsequent development of nuclear he suspected, it was almost pure (90.16%) uric medicine was inevitable. It took a little time, but the acid. As a thorough scientist he also determined the 139-yr chain of cause and effect that followed was "proportional number" of 37.5 for urea. ("Propor inexorable (7). tional" or "equivalent" weight was the current termi One June week in 1815 an exotic animal exhibi nology for what we now call "atomic weight.") This tion was held on the Strand in London. A young 37.5 would be used by Friedrich Woehler in his "animal chemist" named William Prout (we would famous 1828 paper on the synthesis of urea. Thus now call him a clinical pathologist) attended this Prout, already the father of clinical pathology, be scientific event of the year. While he was viewing a came the grandfather of organic chemistry. boa constrictor recently captured in South America, [Prout was also the first man to use iodine (2 yr the animal defecated and Prout was amazed by what after its discovery in 1814) in the treatment of thy he saw. The physiological incident was common roid goiter. He considered his greatest success the place, but he was the only person alive who could discovery of muriatic acid, inorganic HC1, in human recognize the material. Just a year earlier he had gastric juice. -

(19) United States (12) Patent Application Publication (10) Pub
US 20060001569A1 (19) United States (12) Patent Application Publication (10) Pub. N0.: US 2006/0001569 A1 Scandurra (43) Pub. Date: Jan. 5, 2006 (54) RADIOMETRIC PROPULSION SYSTEM Publication Classi?cation (76) Inventor: Marco Scandurra, Cambridge, MA (51) 110.0. 001s 3/02 (2006.01) 601K 15/00 (2006.01) Correspondence Address: (52) Us. 01. ............................................... ..342/351;374/1 STANLEY H. KREMEN 4 LENAPE LANE (57) ABSTRACT EAST BRUNSWICK, NJ 08816 (US) Ahighly ef?cient propulsion system for ?ying, ?oating, and Appl. No.: ground vehicles that operates in an atmosphere under stan (21) 11/068,470 dard conditions according to radiornetric principles. The Filed: Feb. 22, 2005 propulsion system comprises specially fabricated plates that (22) exhibit large linear thrust forces upon application of a Related US. Application Data temperature gradient across edge surfaces. Several ernbodi rnents are presented. The propulsion system has no moving (60) Provisional application No. 60/521,774, ?led on Jul. parts, does not use Working ?uids, and does not burn 1, 2004. hydrocarbon fuels. 1O 13 12 \ 11 Patent Application Publication Jan. 5, 2006 Sheet 1 0f 16 US 2006/0001569 A1 FIG. 2 Patent Application Publication Jan. 5, 2006 Sheet 2 0f 16 US 2006/0001569 A1 25 2X - FIG. 6 Patent Application Publication Jan. 5, 2006 Sheet 3 0f 16 US 2006/0001569 A1 27 0000000. I.N... 000000. FIG. 7 FIG. 8 FIG. 9 ~ FIG. 10 34 39 QI 40/? 9: 38 35 FIG. 11 Patent Application Publication Jan. 5, 2006 Sheet 4 0f 16 US 2006/0001569 A1 42 43/ FIG. 12 Patent Application Publication Jan. -

Pulling and Lifting Macroscopic Objects by Light
Pulling and lifting macroscopic objects by light Gui-hua Chen1,2, Mu-ying Wu1, and Yong-qing Li1,2* 1School of Electronic Engineering & Intelligentization, Dongguan University of Technology, Dongguan, Guangdong, P.R. China 2Department of Physics, East Carolina University, Greenville, North Carolina 27858-4353, USA (Received XX Month X,XXX; published XX Month, XXXX) Laser has become a powerful tool to manipulate micro-particles and atoms by radiation pressure force or photophoretic force, but optical manipulation is less noticeable for large objects. Optically-induced negative forces have been proposed and demonstrated to pull microscopic objects for a long distance, but are hardly seen for macroscopic objects. Here, we report the direct observation of unusual light-induced attractive forces that allow pulling and lifting centimeter-sized light-absorbing objects off the ground by a light beam. This negative force is based on the radiometric effect on a curved vane and its magnitude and temporal responses are directly measured with a pendulum. This large force (~4.4 μN) allows overcoming the gravitational force and rotating a motor with four-curved vanes (up to 600 rpm). Optical pulling of macroscopic objects may find nontrivial applications for solar radiation-powered near-space propulsion systems and for understanding the mechanisms of negative photophoretic forces. PACS number: 42.50.Wk, 87.80.Cc, 37.10.Mn In Maxwell’s theory of electromagnetic waves, light carries rotation of the objects, they are insufficient to manipulate the energy and momentum, and the exchange of the energy and objects in vertical direction. momentum in light-matter interaction generates optically-induced Here we report a direct observation of a negative optically- forces acting on material objects. -

Capítulo 21 21
Capítulo 21 21 Universidade Estadual de Campinas Instituto de Física “Gleb Wataghin” Instrumentação para Ensino – F 809 RADIÔMETRO DE CROOKES III Aluno: Everton Geiger Gadret Orientadora: Profª. Dra. Mônica Alonso Cotta Coordenador: Prof. Dr. José Joaquim Lunazzi 21-1 Introdução O radiômetro é um instrumento capaz de medir radiação. Ao incidir sobre as palhetas do radiômetro, a luz faz com que se inicie um movimento de rotação das palhetas em torno do eixo da haste que o sustenta (figura 1). Quando observou pela primeira vez o movimento, Maxwell imaginou estar observando um experimento que comprovava sua previsão a respeito da pressão de radiação que uma onda eletromagnética exerce sobre a matéria. Ledo engano, pois o movimento ocorria no sentido inverso ao previsto por sua teoria. Até os dias de hoje, acredita-se que o fenômeno que ocorre tem natureza termodinâmica, sendo o movimento gerado por correntes de convecção do meio geradas pelo aquecimento desigual das faces das palhetas. A solução correta para o fenômeno foi dada qualitativamente por Osborne Reynolds. Em 1879 Reynolds submeteu um artigo à Royal Society no qual considerava o que chamou de “transpiração térmica” e também discutiu a teoria do radiômetro. Ele chamou de “transpiração térmica” o fluxo de gás através de palhetas porosas caudado pela diferença de pressão entre os lados da palheta. Se o gás está inicialmente à mesma pressão dos dois lados, há um fluxo de gás do lado mais frio para o lado mais quente, resultando em uma pressão maior do lado quente se as palhetas não se movessem. O equilíbrio é alcançado quando a razão entre as pressões de cada lado é a raiz quadrada da razão das temperaturas absolutas. -

Ihtc14-22023
Proceedings of the 14th International Heat Transfer Conference IHTC14 August 08-13, 2010, Washington, DC, USA IHTC14-22023 REYNOLDS, MAXWELL AND THE RADIOMETER, REVISITED Holger Martin Thermische Verfahrenstechnik, Karlsruhe Institute of Technology (KIT) Karlsruhe, Germany ABSTRACT later by G. Hettner, goes through a maximum. Albert Einstein’s In 1969, S. G. Brush and C. W. F. Everitt published a approximate solution of the problem happens to give the order historical review, that was reprinted as subchapter 5.5 Maxwell, of magnitude of the forces in the maximum range. Osborne Reynolds, and the radiometer, in Stephen G. Brush’s famous book The Kind of Motion We Call Heat. This review A comprehensive formula and a graph of the these forces covers the history of the explanation of the forces acting on the versus pressure combines all the relevant theories by Knudsen vanes of Crookes radiometer up to the end of the 19th century. (1910), Einstein (1924), Maxwell (1879) (and Hettner (1926), The forces moving the vanes in Crookes radiometer (which are Sexl (1928), and Epstein (1929) who found mathematical not due to radiation pressure, as initially believed by Crookes solutions for Maxwells creeping flow equations for non- and Maxwell) have been recognized as thermal effects of the isothermal spheres and circular discs, which are important for remaining gas by Reynolds – from his experimental and thermophoresis and for the radiometer). theoretical work on Thermal Transpiration and Impulsion, in 1879 – and by the development of the differential equations The mechanism of Thermal Creeping Flow will become of describing Thermal Creeping Flow, induced by tangential increasing interest in micro- and submicro-channels in various stresses due to a temperature gradient on a solid surface by new applications, so it ought to be known to every graduate Maxwell, earlier in the same year, 1879. -

Forces, Light and Waves Mechanical Actions of Radiation
Forces, light and waves Mechanical actions of radiation Jacques Derouard « Emeritus Professor », LIPhy Example of comets Cf Hale-Bopp comet (1997) Exemple of comets Successive positions of a comet Sun Tail is in the direction opposite / Sun, as if repelled by the Sun radiation Comet trajectory A phenomenon known a long time ago... the first evidence of radiative pressure predicted several centuries later Peter Arpian « Astronomicum Caesareum » (1577) • Maxwell 1873 electromagnetic waves Energy flux associated with momentum flux (pressure): a progressive wave exerts Pressure = Energy flux (W/m2) / velocity of wave hence: Pressure (Pa) = Intensity (W/m2) / 3.10 8 (m/s) or: Pressure (nanoPa) = 3,3 . I (Watt/m2) • NB similar phenomenon with acoustic waves . Because the velocity of sound is (much) smaller than the velocity of light, acoustic radiative forces are potentially stronger. • Instead of pressure, one can consider forces: Force = Energy flux x surface / velocity hence Force = Intercepted power / wave velocity or: Force (nanoNewton) = 3,3 . P(Watt) Example of comet tail composed of particles radius r • I = 1 kWatt / m2 (cf Sun radiation at Earth) – opaque particle diameter ~ 1µm, mass ~ 10 -15 kg, surface ~ 10 -12 m2 – then P intercepted ~ 10 -9 Watt hence F ~ 3,3 10 -18 Newton comparable to gravitational attraction force of the sun at Earth-Sun distance Example of comet tail Influence of the particles size r • For opaque particles r >> 1µm – Intercepted power increases like the cross section ~ r2 thus less strongly than gravitational force that increases like the mass ~ r3 Example of comet tail Influence of the particles size r • For opaque particles r << 1µm – Solar radiation wavelength λ ~0,5µm – r << λ « Rayleigh regime» – Intercepted power varies like the cross section ~ r6 thus decreases much stronger than gravitational force ~ r3 Radiation pressure most effective for particles size ~ 1µm Another example Ashkin historical experiment (1970) A. -

Researchers Turn Classic Children's Toy Into Tiny Motor 30 June 2010, by Eric Betz
Researchers Turn Classic Children's Toy Into Tiny Motor 30 June 2010, By Eric Betz from the radiometer, leaving a thin, low-pressure atmosphere inside. The air molecules near the black surface get warm, while the air molecules on the silver side of the blade stay cool. That creates a strong temperature difference between the two sides. It’s this temperature difference that causes the air to flow and makes the propeller spin, generating a miniscule amount of power, but enough to be useful. By modifying the design and applying a high- tech coating to the blades, they were able to remove the bulb and make it small enough to navigate human arteries. “When there is a temperature difference between the gas and the room, there’s a flow of air,” said Li- Pictured above is a Crookes radiometer -- also known as Hsin Han, of the University of Texas at Austin who the light mill -- which consists of an airtight glass bulb, headed up the team of researchers. “We needed a containing a partial vacuum. Inside are a set of vanes tiny little motor to place at the end of a catheter, which are mounted on a spindle. The vanes rotate when and we realized we could build a micromotor much exposed to light, with faster rotation for more intense smaller for cheaper—and with less effort—using this light, providing a quantitative measurement of method.” electromagnetic radiation intensity. The approach is part of an effort to get high quality, 3D-images from inside arteries and blood vessels using a technique called optical coherence Researchers at the University of Texas at Austin tomography (OCT). -

By Philip Gibbs
How does a light-mill work? By Philip Gibbs Abstract: This answer to the Frequently Asked Question first appeared in the Usenet Physics FAQ in 1997. In 1873, while investigating infrared radiation and the element thallium, the eminent Victorian experimenter Sir William Crookes developed a special kind of radiometer, an instrument for measuring radiant energy of heat and light. Crookes's Radiometer is today marketed as a conversation piece called a light-mill or solar engine. It consists of four vanes, each of which is blackened on one side and silvered on the other. These are attached to the arms of a rotor which is balanced on a vertical support in such a way that it can turn with very little friction. The mechanism is encased inside a clear glass bulb that has been pumped out to a high, but not perfect, vacuum. When sunlight falls on the light-mill, the vanes turn with the black surfaces apparently being pushed away by the light. Crookes at first believed this demonstrated that light radiation pressure on the black vanes was turning it around, just like water in a water mill. His paper reporting the device was refereed by James Clerk Maxwell, who accepted the explanation Crookes gave. It seems that Maxwell was delighted to see a demonstration of the effect of radiation pressure as predicted by his theory of electromagnetism. But there is a problem with this explanation. Light falling on the black side should be absorbed, while light falling on the silver side of the vanes should be reflected. The net result is that there is twice as much radiation pressure on the metal side as on the black. -

Sir William Crookes (1832-1919) Published on Behalf of the New Zealand Institute of Chemistry in January, April, July and October
ISSN 0110-5566 Volume 82, No.2, April 2018 Realising the hydrogen economy: economically viable catalysts for hydrogen production From South America to Willy Wonka – a brief outline of the production and composition of chocolate A day in the life of an outreach student Ngaio Marsh’s murderous chemistry Some unremembered chemists: Sir William Crookes (1832-1919) Published on behalf of the New Zealand Institute of Chemistry in January, April, July and October. The New Zealand Institute of Chemistry Publisher Incorporated Rebecca Hurrell PO Box 13798 Email: [email protected] Johnsonville Wellington 6440 Advertising Sales Email: [email protected] Email: [email protected] Printed by Graphic Press Editor Dr Catherine Nicholson Disclaimer C/- BRANZ, Private Bag 50 908 The views and opinions expressed in Chemistry in New Zealand are those of the individual authors and are Porirua 5240 not necessarily those of the publisher, the Editorial Phone: 04 238 1329 Board or the New Zealand Institute of Chemistry. Mobile: 027 348 7528 Whilst the publisher has taken every precaution to ensure the total accuracy of material contained in Email: [email protected] Chemistry in New Zealand, no responsibility for errors or omissions will be accepted. Consulting Editor Copyright Emeritus Professor Brian Halton The contents of Chemistry in New Zealand are subject School of Chemical and Physical Sciences to copyright and must not be reproduced in any Victoria University of Wellington form, wholly or in part, without the permission -
Numerical Simulation of the Crookes Radiometer
Numerical Simulation of the Crookes Radiometer Luc Mieussens, Guillaume Dechristé Institut de Mathématiques de Bordeaux Université de Bordeaux Séminaire de mécanique des fluides numériques, Institut Henri Poincaré January 25–26, 2016 Crookes radiometer invented by W. Crookes (1874) • rarefied gas effect (Kn 0:1): disappears in vacuum or with • dense gases ≈ Reynolds, Maxwell: light• heated vanes ! temperature difference in ! white side the gas temperature Tw black side force (radiometric forces) temperature Tb>Tw ! Radiometric forces renewed interest: possible application for microflows (MEMS) • this talk: a numerical tool for 3D simulations of the Crookes • radiometer (based on the Boltzmann equation) other applications: any rarefied flow with moving obstacles • (e.g. vacuum pumps) Outline 1 Origin of the radiometric forces 2 Kinetic model 3 Numerical method 4 2D Simulations 5 Extensions Origin of the radiometric forces Crookes: radiation pressure ("radiometer”) • Reynolds 1874: pressure difference in the gas • gas pressure difference white side temperature Tw pb>pw black side temperature Tb>Tw “area” effect Origin of the radiometric forces Reynolds and Maxwell 1879: edge effect • white side temperature Tw black side Tb temperature Tb>Tw Tw temperature gradient Origin of the radiometric forces Reynolds and Maxwell 1879: edge effect • white side temperature Tw black side Tb temperature Tb>Tw Tw temperature gradient Origin of the radiometric forces Reynolds and Maxwell 1879: edge effect • white side temperature Tw black side Tb temperature Tb>Tw Tw temperature gradient Origin of the radiometric forces Reynolds and Maxwell 1879: edge effect • white side temperature Tw radiometric force black side Tb temperature Tb>Tw Tw temperature gradient Origin of the radiometric forces Reynolds and Maxwell 1879: edge effect • white side temperature Tw radiometric force black side Tb temperature Tb>Tw Tw temperature gradient Origin of the radiometric forces recent works: • • Gimelshein, Muntz, Selden, Ketsdever, Alexeenko, etc. -
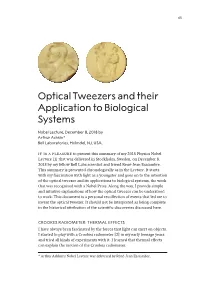
Nobel Lecture: Optical Tweezers and Their Application to Biological Systems
65 Optical Tweezers and their Application to Biological Systems Nobel Lecture, December 8, 2018 by Arthur Ashkin* Bell Laboratories, Holmdel, NJ, USA. it is a pleasure to present this summary of my 2018 Physics Nobel Lecture [1] that was delivered in Stockholm, Sweden, on December 8, 2018 by my fellow Bell Labs scientist and friend René-Jean Essiambre. This summary is presented chronologically as in the Lecture. It starts with my fascination with light as a youngster and goes on to the invention of the optical tweezer and its applications to biological systems, the work that was recognized with a Nobel Prize. Along the way, I provide simple and intuitive explanations of how the optical tweezer can be understood to work. This document is a personal recollection of events that led me to invent the optical tweezer. It should not be interpreted as being complete in the historical attribution of the scientifc discoveries discussed here. CROOKES RADIOMETER: THERMAL EFFECTS I have always been fascinated by the forces that light can exert on objects. I started to play with a Crookes radiometer [2] in my early teenage years and tried all kinds of experiments with it. I learned that thermal efects can explain the motion of the Crookes radiometer. * Arthur Ashkin's Nobel Lecture was delivered by René-Jean Essiambre. 66 THE NOBEL PRIZES Figure 1. Crookes radiometer: a) side view b) top view showing the direction of rotation. Thermal effects are responsible for the rotation of the vanes. Black surfaces absorb light which heats up the surface. In contrast, metallic surfaces refect light with negligible heat generation.