Methods and Spatial Extent of Geophysical Investigations, Mono Lake, California, 2009 to 2011
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geologic Map of the Long Valley Caldera, Mono-Inyo Craters
DEPARTMENT OF THE INTERIOR TO ACCOMPANY MAP 1-1933 US. GEOLOGICAL SURVEY GEOLOGIC MAP OF LONG VALLEY CALDERA, MONO-INYO CRATERS VOLCANIC CHAIN, AND VICINITY, EASTERN CALIFORNIA By Roy A. Bailey GEOLOGIC SETTING VOLCANISM Long Valley caldera and the Mono-Inyo Craters Long Valley caldera volcanic chain compose a late Tertiary to Quaternary Volcanism in the Long Valley area (Bailey and others, volcanic complex on the west edge of the Basin and 1976; Bailey, 1982b) began about 3.6 Ma with Range Province at the base of the Sierra Nevada frontal widespread eruption of trachybasaltic-trachyandesitic fault escarpment. The caldera, an east-west-elongate, lavas on a moderately well dissected upland surface oval depression 17 by 32 km, is located just northwest (Huber, 1981).Erosional remnants of these mafic lavas of the northern end of the Owens Valley rift and forms are scattered over a 4,000-km2 area extending from the a reentrant or offset in the Sierran escarpment, Adobe Hills (5-10 km notheast of the map area), commonly referred to as the "Mammoth embayment.'? around the periphery of Long Valley caldera, and The Mono-Inyo Craters volcanic chain forms a north- southwestward into the High Sierra. Although these trending zone of volcanic vents extending 45 km from lavas never formed a continuous cover over this region, the west moat of the caldera to Mono Lake. The their wide distribution suggests an extensive mantle prevolcanic basement in the area is mainly Mesozoic source for these initial mafic eruptions. Between 3.0 granitic rock of the Sierra Nevada batholith and and 2.5 Ma quartz-latite domes and flows erupted near Paleozoic metasedimentary and Mesozoic metavolcanic the north and northwest rims of the present caldera, at rocks of the Mount Morrisen, Gull Lake, and Ritter and near Bald Mountain and on San Joaquin Ridge Range roof pendants (map A). -

Yosemite, Lake Tahoe & the Eastern Sierra
Emerald Bay, Lake Tahoe PCC EXTENSION YOSEMITE, LAKE TAHOE & THE EASTERN SIERRA FEATURING THE ALABAMA HILLS - MAMMOTH LAKES - MONO LAKE - TIOGA PASS - TUOLUMNE MEADOWS - YOSEMITE VALLEY AUGUST 8-12, 2021 ~ 5 DAY TOUR TOUR HIGHLIGHTS w Travel the length of geologic-rich Highway 395 in the shadow of the Sierra Nevada with sightseeing to include the Alabama Hills, the June Lake Loop, and the Museum of Lone Pine Film History w Visit the Mono Lake Visitors Center and Alabama Hills Mono Lake enjoy an included picnic and time to admire the tufa towers on the shores of Mono Lake w Stay two nights in South Lake Tahoe in an upscale, all- suites hotel within walking distance of the casino hotels, with sightseeing to include a driving tour around the north side of Lake Tahoe and a narrated lunch cruise on Lake Tahoe to the spectacular Emerald Bay w Travel over Tioga Pass and into Yosemite Yosemite Valley Tuolumne Meadows National Park with sightseeing to include Tuolumne Meadows, Tenaya Lake, Olmstead ITINERARY Point and sights in the Yosemite Valley including El Capitan, Half Dome and Embark on a unique adventure to discover the majesty of the Sierra Nevada. Born of fire and ice, the Yosemite Village granite peaks, valleys and lakes of the High Sierra have been sculpted by glaciers, wind and weather into some of nature’s most glorious works. From the eroded rocks of the Alabama Hills, to the glacier-formed w Enjoy an overnight stay at a Yosemite-area June Lake Loop, to the incredible beauty of Lake Tahoe and Yosemite National Park, this tour features lodge with a private balcony overlooking the Mother Nature at her best. -

Consequences of Drying Lake Systems Around the World
Consequences of Drying Lake Systems around the World Prepared for: State of Utah Great Salt Lake Advisory Council Prepared by: AECOM February 15, 2019 Consequences of Drying Lake Systems around the World Table of Contents EXECUTIVE SUMMARY ..................................................................... 5 I. INTRODUCTION ...................................................................... 13 II. CONTEXT ................................................................................. 13 III. APPROACH ............................................................................. 16 IV. CASE STUDIES OF DRYING LAKE SYSTEMS ...................... 17 1. LAKE URMIA ..................................................................................................... 17 a) Overview of Lake Characteristics .................................................................... 18 b) Economic Consequences ............................................................................... 19 c) Social Consequences ..................................................................................... 20 d) Environmental Consequences ........................................................................ 21 e) Relevance to Great Salt Lake ......................................................................... 21 2. ARAL SEA ........................................................................................................ 22 a) Overview of Lake Characteristics .................................................................... 22 b) Economic -
Introducing Terminal Lakes Joe Eilers and Ron Larson
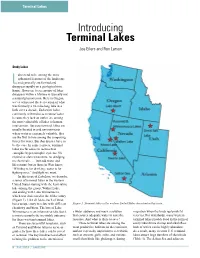
Terminal Lakes Introducing Terminal Lakes Joe Eilers and Ron Larson Study Lakes akes tend to be among the more ephemeral features of the landscape Land generally are formed and disappear rapidly on a geological time frame. However, to see groups of lakes disappear within a lifetime is typically not a natural phenomenon. Here in Oregon, we’ve witnessed the desiccation of what was formerly a 16-mile-long lake in a little over a decade. Endorehic lakes, commonly referred to as terminal lakes because they lack an outlet, are among the most vulnerable of lakes to human intervention. Because terminal lakes are usually located in arid environments where water is extremely valuable, they are the first to lose among the competing forces for water. But that doesn’t have to be the case. In some respects, terminal lakes are far easier to restore than eutrophic/hypereutrophic systems. No expensive alum treatments, no dredging, no chemicals . just add water and life returns: but as those in West know, “Whiskey is for drinking; water is for fighting over.” And fight we must. In this issue of LakeLine, we describe a series of terminal lakes in the western United States starting with the least saline lake among the group, Walker Lake, and ending with Lake Winnemucca, which was desiccated in the 20th century (Figure 1). Like all lakes, each of these has a unique story to relate with different Figure 1. Terminal lakes in the western United States described in this issue. chemistry and biota. The loss of Lake Winnemucca is an informative tale, but it a wider audience and reach a solution migration when the birds replenish fat is not necessarily the inevitable outcome that ensures adequate water to save the reserves. -

Open-File/Color For
Questions about Lake Manly’s age, extent, and source Michael N. Machette, Ralph E. Klinger, and Jeffrey R. Knott ABSTRACT extent to form more than a shallow n this paper, we grapple with the timing of Lake Manly, an inconstant lake. A search for traces of any ancient lake that inundated Death Valley in the Pleistocene upper lines [shorelines] around the slopes Iepoch. The pluvial lake(s) of Death Valley are known col- leading into Death Valley has failed to lectively as Lake Manly (Hooke, 1999), just as the term Lake reveal evidence that any considerable lake Bonneville is used for the recurring deep-water Pleistocene lake has ever existed there.” (Gale, 1914, p. in northern Utah. As with other closed basins in the western 401, as cited in Hunt and Mabey, 1966, U.S., Death Valley may have been occupied by a shallow to p. A69.) deep lake during marine oxygen-isotope stages II (Tioga glacia- So, almost 20 years after Russell’s inference of tion), IV (Tenaya glaciation), and/or VI (Tahoe glaciation), as a lake in Death Valley, the pot was just start- well as other times earlier in the Quaternary. Geomorphic ing to simmer. C arguments and uranium-series disequilibrium dating of lacus- trine tufas suggest that most prominent high-level features of RECOGNITION AND NAMING OF Lake Manly, such as shorelines, strandlines, spits, bars, and tufa LAKE MANLY H deposits, are related to marine oxygen-isotope stage VI (OIS6, In 1924, Levi Noble—who would go on to 128-180 ka), whereas other geomorphic arguments and limited have a long and distinguished career in Death radiocarbon and luminescence age determinations suggest a Valley—discovered the first evidence for a younger lake phase (OIS 2 or 4). -
2021 Falling for the Migration
Falling for the Migration: Bridgeport, Crowley, Mono American Avocets in flight, photo by Bob Steele August 20–22, 2021 ● Dave Shuford $182 per person / $167 for Mono Lake Committee members enrollment limited to 10 participants Welcome to our field seminar on the fall migration of birds in the Bridgeport Valley and the adjacent Sierra, the Mono Basin, Crowley Lake, Long Valley, and the outskirts of Mammoth Lakes. Beginners as well as experts will enjoy this introduction to the area’s birdlife found in a wide variety of habitats, from the shimmering shores of Mono Lake to lofty Sierra peaks. We will identify about 100 species by plumage and calls, and probe the secrets of their natural history. This seminar will include informal discussions on migration strategies, behavior, and ecology that complement our field observations. This seminar will involve easy hiking at elevations ranging from 6,400 to 9,600 feet above sea level. We will hike 1–2 miles a day, mostly on level terrain. The first stop Friday morning is at Bridgeport Reservoir, a mecca for migrant and late‐breeding waterbirds. For those who prefer to meet the seminar at this location (arriving Friday morning from points north), please contact Nora Livingston at [email protected] or (760) 647‐6595 to obtain directions. Dave Shuford is an expert birder, avid naturalist and teacher, and a retired professional ornithologist. Dave’s bird research in the region includes a long‐term study on the ecology of Mono Lake’s California Gull colony, an atlas of breeding birds in the Glass Mountain area, and surveys of Snowy Plovers at Mono and Owens lakes. -

Most Recent Eruption of the Mono Craters, Eastern Central California
JOURNALOF GEOPHYSICALRESEARCH, VOL. 91, NO. B12, PAGES12,539-12,571, NOVEMBER10, 1986 MOST RECENT ERUPTION OF THE MONO CRATERS, EASTERN CENTRAL CALIFORNIA Kerry Sieh and Marcus Bursik Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena Abstract. The most recent eruption at the gradually diminishing explosiveness of the North Mono Craters occurred in the fourteenth century Mono eruption probably resulted from a decrease A.D. Evidence for this event includes 0.2 km3 of of water content downward in the dike. The pyroclastic fall, flow, and surge deposits and pulsating nature of the early, explosive phase of 0.4 km3 of lava domesand flows. These rhyolitic the eruption may represent the repeated rapid deposits emanated from aligned vents at the drawdown of slowly rising vesiculated magma to northern end of the volcanic chain. Hence we about the saturation depth of the water within have named this volcanic episode the North Mono it. eruption. Initial explosions were Plinian to sub-Plinian events whose products form Introduction overlapping blankets of air fall tephra. Pyroclastic flow and surge deposits lie upon Several dozen silicic eruptions have occurred these undisturbed fall beds within several along the tectonically active eastern flank of kilometers of the source vents. Extrusion of the central Sierra Nevada within the past 35,000 five domes and coulees, including Northern Coulee years; many of these eruptions have, in fact, and Panurn Dome, completed the North Mono occurred within the past 2000 years. This eruption. Radiocarbon dates and violent, exciting, and youthful past suggests an dendrochronological considerations constrain the interesting future and encouraged us to undertake eruption to a period between A.D. -

Decline of the World's Saline Lakes
PERSPECTIVE PUBLISHED ONLINE: 23 OCTOBER 2017 | DOI: 10.1038/NGEO3052 Decline of the world’s saline lakes Wayne A. Wurtsbaugh1*, Craig Miller2, Sarah E. Null1, R. Justin DeRose3, Peter Wilcock1, Maura Hahnenberger4, Frank Howe5 and Johnnie Moore6 Many of the world’s saline lakes are shrinking at alarming rates, reducing waterbird habitat and economic benefits while threatening human health. Saline lakes are long-term basin-wide integrators of climatic conditions that shrink and grow with natural climatic variation. In contrast, water withdrawals for human use exert a sustained reduction in lake inflows and levels. Quantifying the relative contributions of natural variability and human impacts to lake inflows is needed to preserve these lakes. With a credible water balance, causes of lake decline from water diversions or climate variability can be identified and the inflow needed to maintain lake health can be defined. Without a water balance, natural variability can be an excuse for inaction. Here we describe the decline of several of the world’s large saline lakes and use a water balance for Great Salt Lake (USA) to demonstrate that consumptive water use rather than long-term climate change has greatly reduced its size. The inflow needed to maintain bird habitat, support lake-related industries and prevent dust storms that threaten human health and agriculture can be identified and provides the information to evaluate the difficult tradeoffs between direct benefits of consumptive water use and ecosystem services provided by saline lakes. arge saline lakes represent 44% of the volume and 23% of the of migratory shorebirds and waterfowl utilize saline lakes for nest- area of all lakes on Earth1. -

Eastern Sierra Fall Color
Quick Fall Facts When and How to Get Here WHY OUR FALL COLOR SEASON FIND OUT WHEN TO “GO NOW!” GOES ON AND ON AND ON See detailed fall color reporting at The Eastern Sierra’s varied elevations — from www.CaliforniaFallColor.com approximately 5,000 to 10,000 feet (1,512 to 3,048 m) Follow the Eastern Sierra on Facebook: — means the trees peak in color at different times. Mono County (VisitEasternSierra) Bishop Creek, Rock Creek, Virginia Lakes and Green Mammoth Lakes (VisitMammoth) Creek typically turn color first (mid-to late September), Bishop Chamber of Commerce (VisitBishop) with Mammoth Lakes, McGee Creek, Bridgeport, Conway Summit, Sonora and Monitor passes peaking next (late September), and finally June Lake Loop, Lundy Canyon, Lee Vining Canyon, Convict Lake and the West Walker River offering a grand finale from FLY INTO AUTUMN! the first to third week of October. The City of Bishop From any direction, the drive to the shows color into early November. Eastern Sierra is worth it…but the flight connecting through LAX to Mammoth Yosemite Airport is TREE SPECIES possibly more spectacular and gets you here faster: Trees that change color in the Eastern Sierra www.AlaskaAir.com include aspen, cottonwood and willow. LIKE CLOCKWORK NEED HELP PLANNING YOUR TRIP? Ever wonder how Eastern Sierra leaves know CONTACT US: to go from bright green to gold, orange and russet Bishop Chamber of Commerce & Visitor Center as soon as the calendar hits mid-September? Their 760-873-8405 www.BishopVisitor.com cue is actually from the change in air temperature 690 N. -

Revised Chronology for Late Pleistocene Mono Lake Sediments Based on Paleointensity Correlation to the Global Reference Curve ⁎ Susan H
Earth and Planetary Science Letters 252 (2006) 94–106 www.elsevier.com/locate/epsl Revised chronology for late Pleistocene Mono Lake sediments based on paleointensity correlation to the global reference curve ⁎ Susan H. Zimmerman a, , Sidney R. Hemming a,b, Dennis V. Kent b,c, Stephanie Y. Searle a a Department of Earth and Environmental Sciences, Columbia University, New York, NY 10027, USA b Lamont-Doherty Earth Observatory of Columbia University, Palisades, NY 10964, USA c Department of Geological Sciences, Rutgers University, Piscataway, NJ 08854, USA Received 2 May 2006; received in revised form 12 September 2006; accepted 13 September 2006 Available online 25 October 2006 Editor: M.L. Delaney Abstract Lakes are highly sensitive recorders of climate processes, but are extremely difficult to correlate precisely to ice-core and marine records, especially in the absence of reliable radiocarbon dates. Relative paleointensity (RPI) of Earth's magnetic field is an independent method of correlating high-resolution climate records, and can be applied to both marine and terrestrial sediments, as well as (inversely) correlated to the cosmogenic nuclide records preserved in ice cores. Here we present the correlation of an RPI record from Mono Lake, California to GLOPIS, the Global PaleoIntensity Stack, which increases the age estimation of the basal Mono Lake sediments by N20000 yr (20 kyr), from ∼40 ka (kyr before present) to 67 ka. The Mono Lake sediments thus preserve paleoclimatic records of most of the last glacial period, from 67 to 14 ka. In addition, the paleointensity-based age of 40 ka for the geomagnetic excursion preserved at Mono Lake indicates that this is a record of the global Laschamp excursion. -

Mono and Southeastern Great Basin
3 •. .,• .{ • ,l<. • --• - • • •• 4:"."".. • 116 •,. California’s Botanical Landscapes - 3 chapter five Mono and Southeastern Great Basin The eastern fringe of California slices The crest of the Sierra Nevada defines Above: The crest of the Sierra off a thin strand at the edge of a vast the western hydrologic edge of the Great Nevada defines the western edge of interior biome, the Great Basin. Often Basin, within which waters drain into the Great Basin in central eastern California. The Mono Basin, characterized as an immense and homo interior basins. The entirety of the Sierra with its crown jewel Mono Lake, geneous sagebrush (Artemisia sp.) sea, Nevada was built by similar geologic exemplifies the character of the this region in fact encompasses great forces that created the Great Basin. The California part of this province, topographic, geologic, climatic, and vege narrative for vegetation in this chapter with expansive cold-adapted tative diversity, haunting in expansiveness starts with the lower montane (~2,500 m sagebrush steppe intermixed with hardy forbs and grasses. of landscape, surprising in richness of at the latitude of Mono Lake) and basin Robert Wick hidden canyons and wetlands. Long lines bottom environments of the eastern Opposite: A winter evening of basin and range draw the eye outward Sierra Nevada, and goes on to embrace along Hot Creek, with rubber to where land meets sky; wave after wave the entire elevation gradients from basin rabbitbrush and sagebrush of mountain ranges pounding the sage to summits of the mountain ranges east spread over rolling hills of the surf. If only a slice, California is fortunate ward to the California-Nevada state Long Valley Caldera. -

CHARACTERISTICS and DISTRIBUTION of LAKES 557 Great Salt Lake, the Density of the Waters of Which Is 1.168; the Wind Alone Somet
CHARACTERISTICS AND DISTRIBUTION OF LAKES 557 Great Salt Lake, the density of the waters of which is 1.168; the wind alone sometimes makes a change in the level of the water of several feet, and a consequent change of density from 1.009 to 1.014 within five minutes has been observed. The water is not alkaline, but contains an excessive quantity of saline material, chiefly sodium chloride.1 Sevier Lake in Utah, the waters of which are intensely saline, is vir- tually a " playa"2 of variable dimensions, attaining in humid seasons an extent of from 180 to 200 square miles, while during periods of drought it practically dries up, leaving a crystalline bed of sodium chloride and sodium sulphate to mark its site. Soda, Walker, Winnemucca, and Pyramid Lakes in Nevada; Albert Lake in Oregon; Mono Lake and Owen's Lake in California, also belong to this category. Great Salt Lake of Utah, 4200 feet above sea-level, about 75 miles long by 50 miles in maximum width, lies at the western base of the Wasatch range, from which it receives numerous streams. The inflow to the lake is variable in amount owing to irregularity in rainfall, and as evaporation, the only means of discharge, is uniform, the lake is subject to fluctuations in area and volume. The lake-bed is shallow and the shores quite flat, so that a slight reduction in water-level causes a notable diminution in the area of the lake, which has varied from 1750 to 2000 square miles. Evaporation from the surface of the lake must be enormous.