Iot Configuration for Industrial and Domestic Water Saving Monitoring
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Setting up Odroid C2 – Throughtput Testing
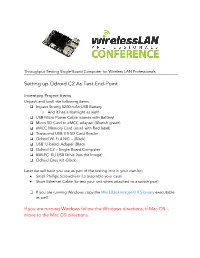
Throughput Testing Single-Board Computer for Wireless LAN Professionals Setting up Odroid C2 As Test End-Point Inventory Project Items Unpack and knoll the following items ❑ Impact Strong 5200 mAh USB Battery o And it has a flashlight as well! ❑ USB Micro Power Cable (comes with Battery) ❑ Micro SD Card to eMCC adapter (Blueish green) ❑ eMCC Memory Card (small with Red label) ❑ Transcend USB 3.0 SD Card Reader ❑ Odroid Wi-Fi 4 NIC – (Black) ❑ USB ‘U-bend’ Adaper (Black ❑ Odroid C2 – Single Board Computer ❑ #WLPC_EU USB Drive (has the Image) ❑ Odroid Case Kit (Black) Later we will have you use as part of the testing (not in your own kit) • Small Phillips Screwdriver (to assemble your case) • Short Ethernet Cable (to test your unit when attached to a switch port) ❑ If you are running Windows copy the Win32DiskImager-0.9.5-binary executable as well. If you are running Windows follow the Windows directions, if Mac OS – move to the Mac OS directions. Mac OS Version Configure Image ❑ Copy Image File from the #WLPC_EU USB drive (in the Odroid for #WLPC_EU folder) to your Desktop… the file name is DietPi_v133_OdroidC2-arm64- (WLAN_PRO) ❑ Open Image File – Boot Drive ❑ Should have a Folder Call “Boot” ❑ Find the dietpi.txt We are changing setting so your Odroid device can join a local SSID and download more files we’ll need. ❑ Under the Wi-Fi Details section change the Wi-Fi SSID to WLPC_EU-01 with a PSK of password. #Enter your Wifi details below, if applicable (Case Sensitive). Wifi_SSID=WLPC_EU-01 Wifi_KEY=password ❑ Under WiFi Hotspot Settings, -

LAB-Manual Iot for Intel Edison
Evaluation of Intel Architecture An Experimental Manual for Computer Architecture, Advanced Microprocessor, System On Chip (SoC) and Compiler Design In association with Intel Collaboration Program Designed by: Zeenat Shareef, MTech (Mobile and Pervasive Computing) Under the guidance of: Dr. S.R.N Reddy, HOD and Associate Professor, CSE Mr. Naveen , Mr. Sumit Verma, Intel Department of Computer Science Indira Gandhi Delhi Technical University for Women Kashmere Gate, Delhi-110006 LIST OF EXPERIMENTS EXP. No Description of Experiment 1. To familiarize with Intel Edison. 2. Write the steps to install the drivers and IDE for Intel Edison 3. Write the steps to configure Intel Edison and enable the WIFI module 4. To enable the Bluetooth module in Intel Edison and connect with a device. 5. Write the steps to blink the LED on the Intel Edison using Eclipse CDT remote explorer(WiFi). EXPERIMENT 1 AIM: To familiarize with Intel Edison. INTEL EDISON- A SOC based on Intel Atom The Intel Edison compute module is designed to lower the barriers to entry for anyone prototyping and producing IoT and wearable computing products. Intel Edison contains the core system processing and connectivity elements: processor, PMIC, RAM, eMMC, and Wi- Fi/BT. Intel Edison is a module that interfaces with end-user systems via a 70-pin connector. The Intel Edison compute module does not include any video input or output interfaces (MIPI CSI, MIPI DSI, HDMI, etc.). Internal image processing and graphics processing cores are disabled (ISP, PowerVR, VED, VEC, VSP, etc.). Intel Edison relies on the end-user support of input power. -
Improving the Beaglebone Board with Embedded Ubuntu, Enhanced GPMC Driver and Python for Communication and Graphical Prototypes
Final Master Thesis Improving the BeagleBone board with embedded Ubuntu, enhanced GPMC driver and Python for communication and graphical prototypes By RUBÉN GONZÁLEZ MUÑOZ Directed by MANUEL M. DOMINGUEZ PUMAR FINAL MASTER THESIS 30 ECTS, JULY 2015, ELECTRICAL AND ELECTRONICS ENGINEERING Abstract Abstract BeagleBone is a low price, small size Linux embedded microcomputer with a full set of I/O pins and processing power for real-time applications, also expandable with cape pluggable boards. The current work has been focused on improving the performance of this board. In this case, the BeagleBone comes with a pre-installed Angstrom OS and with a cape board using a particular software “overlay” and applications. Due to a lack of support, this pre-installed OS has been replaced by Ubuntu. As a consequence, the cape software and applications need to be adapted. Another necessity that emerges from the stated changes is to improve the communications through a GPMC interface. The depicted driver has been built for the new system as well as synchronous variants, also developed and tested. Finally, a set of applications in Python using the cape functionalities has been developed. Some extra graphical features have been included as example. Contents Contents Abstract ..................................................................................................................................................................................... 5 List of figures ......................................................................................................................................................................... -

Suzanne's Microcluster Slides
csinparallel.org Microclusters for teaching PDC Suzanne J. Matthews (West Point) 1 csinparallel.org What is a Microcluster? • A personal, highly portable Beowulf cluster • Enables highly interactive and tactile experiential learning • Notable early examples: – Ultimate Linux Lunch Box (Ron Minnich and Mitch Williams, Sandia National Labs) – LittleFe (Charlie Peck, Earlham College) – Microwulf (Joel Adams, Calvin College) 2 csinparallel.org Single Board Computers (SBCs) 3 csinparallel.org Student Pi (West Point) Suzanne J. Matthews Raspberry Pi nodes - Prototype: Raspberry Pi B nodes - Initial: Raspberry Pi B+ nodes - Current: Raspberry Pi 2 nodes - 900 Mhz quad-core CPU, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Raspbian Linux June 2014 - ~$40 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html October 2014 May 2016 4 csinparallel.org Student Parallella (West Point) Suzanne J. Matthews Parallella nodes - dual-core ARM A9 CPU, 16-core Epiphany co-processor, 1 GB of RAM, μHDMI, μUSB, Gigabit Ethernet - Linaro Linux - ~$145 p/node - Materials: - http://suzannejmatthews.com/private/cluster.html - http://suzannejmatthews.github.io/ October 2014 April 2016 January 2015 5 csinparallel.org Half ShoeBox Clusters (Centre College) David Toth Cubieboard/ODROID nodes (2-node clusters) - Prototype: Cubieboard2: dual-core ARM Cortex A7, 1 GB of RAM, HDMI, USB, 10/100 Ethernet - Latest: ODROID C2: 2Ghz quad-core A53, 2 GB of RAM, HDMI, USB, Gigabit Ethernet, - Android/Ubuntu Linux - ~ $150-$200 p/cluster - Materials: Early 2014 - http://web.centre.edu/david.toth/portablecluster/index.html -

INSTALL ARCH LINUX ARM for a SIMPLE LAN SERVER the Hardware
INSTALL ARCH LINUX ARM FOR A SIMPLE LAN SERVER The Hardware At the top, two possibilities for the DATA drive which will store all your files. A USB-3 SSD external housing with a SSD of your choice and size. In this case a Samsung 850 500GB SSD. OR if more storage is needed, a USB-3 3.5 inch external hard drive enclosure, in this case with a 2 TB WD Red Label hard drive. Next is a 5 VDC 6 Amp power brick for the Odroid-XU4, not shown is a 12 VDC power supply included with the 3.5 inch hard drive if used. At the bottom, a USB SD Reader. A micro SD to SD adapter. A micro SD card OR an emmc to micro SD adapter with an emmc card for the Operating System. Then the Odroid- XU4 SBC (Single Board Computer). With optional Real Time Clock battery, 40 mm cooling fan, and a 1/4 inch plywood base with stand offs to protect the components on the bottom. Of course, any ARM device that Arch Linux Arm supports can be used, such as a Raspberry PI 4 or the new Odroid N2 with 4 GB RAM, or what ever. Just go to the Arch Linux Arm site, https://archlinuxarm.org/ Hover over "Platforms" then the Architecture, brand name, etc. to see if your device is supported. Click on your device and get a page with overview and installation tabs. Page 1 of 12 EndeavourOS_Server_ARM.odt For security reasons, this server is not intended to be accessed from the internet and should be connected directly by LAN cable to a router or to a switch connected to the router. -

Introduction to Microcontrollers 9/16/2017
Introduction to Microcontrollers 9/16/2017 Introduction to Microcontrollers June 2017 Scott A. Theis — W2LW Rev 5 (08/02/2017) What’s it all about • How to get started • What are some of the common controller options • General introduction to terms and types • Input and Output • Information on getting started Sampling of Microcontrollers • tinyAVR — As little as 6 pins, over 1MHz • PICAXE — As little as 8 pins, up to 64MHz • Ardunio (ATMega) — Standalone or on board, 16+MHz • Raspberry Pi — Single-Board Computer, up to (and over) 1GHz • There are dozens of common microcontrollers Propeller BasicStamp 8051 MIP • There are a number of single-board computers: Beagle Bone NetDuino Intel Galileo ASUS Tinker Scott A. Theis, W2LW 1 Introduction to Microcontrollers 9/16/2017 Focus • Arduino and PICAXE— Microcontroller: • Well suited for specific application • Code is lightweight (so is memory) • Does not have an operating system per se • Raspberry Pi — Single-Board Computer: • Really a small computer with GPIO pins and lots of interface logic • Can be used for a wide spectrum of tasks • Lots of options and compute power Covering…. • Introduction, Jargon and Background • General Purpose Input and Output (GPIO) • Integrated Development Environment (IDE) • Some Examples Introduction, Background and Jargon Scott A. Theis, W2LW 2 Introduction to Microcontrollers 9/16/2017 The Arduino • Created as a simple, open source, easy to use platform • Developed in 2003 as a less costly replacement to the BASIC Stamp • Support has grown dramatically in the past -

Passmark - Android Device List
PassMark - Android Device List https://www.androidbenchmark.net/device_list.php AndroidTM Benchmarks Performance Comparison of Android Devices Below is an alphabetical list of all Android device types that appear in the charts. Clicking on a specific device name will take you to the charts where it appears in and will highlight it for you. PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) 4G R17S 1,572 4,088 1253 1 A-gold BV9500Plus 5,052 13,068 375 1 A-gold BV9800 4,450 11,400 487 1 A-gold F1 4,237 10,869 531 7 A-gold S3_Pro 4,392 11,219 504 2 A-gold Z2_PRO 4,406 11,246 499 1 A1 Alpha 20+ 4,753 12,266 435 1 Acer A3-A40 1,982 5,269 1082 1 Acer AO722 519 1,272 1725 1 1 z 62 2020-10-14, 12:02 PassMark - Android Device List https://www.androidbenchmark.net/device_list.php PassMark Rating CPUMark Rating PassMark Rank Android Device Type Samples (higher is better) (higher is better) (lower is better) AGM A10 2,030 8,521 1066 1 ALCATEL A574BL 497 1,202 1736 1 AlcatelOneTouch Alcatel_5044R 438 1,129 1759 1 Alco CT9223W97 1,214 3,111 1384 1 ALLDOCUBE M8 2,730 7,274 882 5 ALLDOCUBE T701 1,092 4,554 1437 1 ALLDOCUBE U1006H 1,902 4,931 1125 1 ALLVIEW P7_PRO 1,691 4,543 1210 1 ALLVIEW X4_Soul 2,536 6,938 925 1 Alps Acer One 8 T4-82L 2,539 6,526 924 1 Alps Tablet18T 1,201 3,043 1394 1 Alps tb8788p1_64_bsp 2,343 5,784 983 2 Amazon KFKAWI 712 1,701 1589 4 Amazon KFMAWI 2,306 5,640 992 19 Amazon KFONWI 1,082 2,588 1442 3 Amlogic A95X-A3 1,228 3,182 1381 1 Amlogic ABOX A4 397 -

Security Monitor for Mobile Devices: Design and Applications
UNIVERSITY OF CALIFORNIA, IRVINE Security Monitor for Mobile Devices: Design and Applications DISSERTATION submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in Computer Science by Saeed Mirzamohammadi Dissertation Committee: Professor Ardalan Amiri Sani, UCI, Chair Professor Gene Tsudik, UCI Professor Sharad Mehrotra, UCI Doctor Sharad Agarwal, MSR 2020 Portion of Chapter 1 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 1 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 1 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 1 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 2 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 2 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 3 c 2018 ACM, reprinted, with permission, from [148] Portion of Chapter 4 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 5 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 6 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2020 ACM, reprinted, with permission, from [151] Portion of Chapter 7 c 2017 ACM, reprinted, with permission, from [150] Portion of Chapter 7 c 2018 IEEE, reprinted, with permission, from [149] Portion of Chapter 7 c 2018 ACM, reprinted, with permission, from [148] All other materials c 2020 Saeed Mirzamohammadi TABLE OF CONTENTS Page LIST OF FIGURES v LIST OF TABLES vii ACKNOWLEDGMENTS viii VITA ix ABSTRACT OF THE DISSERTATION xi 1 Introduction 1 1.1 Applications of the security monitor . -

Cubieboard Cubieboard2 Cubietruck Beaglebone Black
Raspberry Pi (Model B rev.2) Cubieboard Cubieboard2 Cubietruck Beaglebone Black 1 Ghz (OC) ARM® Cortex-A6 1 Ghz ARM® Cortex-A8 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A7 Dual Core 1 Ghz ARM® Cortex-A8 CPU ARM1176JZF-F Allwinner A10 C8096CA Allwinner A20 Allwinner A20 AM335x GPU/FPU VideoCore IV Mali-400 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) Mali-400MP2 (CedarX, OpenGL) SGX350 3D / NEON FPU accelerator RAM 512 MB 1 GB DDR3 2 GB 2 GB 512 MB DDR3 Storage micro SD/SDHC 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 4 GB NAND Flash, micro SD/SDHC, SATA 2.0 2GB eMMC Power micro USB (5V/1A) 3.5 W DC 5v/2A DC 5v/2A DC 5v/2.5A DC 5V/500mA Video RCA Composite Video, HDMI 1.4 HDMI HDMI HDMI/VGA microHDMI Audio 3.5 mm Headphone Jack 3.5 mm Headphone Jack / Line In 3.5 mm Headphone Jack 3.5 mm Headphone Jack, SPDIF Network 10/100 Mbps 10/100 Mbps 10/100 Mbps 10/100/1000 Mbps, Wifi, Bluetooth 10/100 Mbps 2x46 PIN GPIO I/O ports 26 PIN GPIO, 2x Ribon 2x48 PIN GPIO, 4PIN Serial, 1IR 2x48 PIN GPIO, 4PIN Serial, 1IR 1x 54 PIN GPIO (Arduino Shield Compatible) USB ports 2x USB 2.0 2x USB 2.0 2x USB 2.0, 1 mini USB OTG 2x USB 2.0, 1 mini USB OTG 1x USB 2.0 Linux (Raspbian, Debian, Fedora, Arch, Gentoo, Kali), Andoid, Angstrom, Ubuntu, Fedora, Gentoo. -
Passmark Android Benchmark Charts - CPU Rating
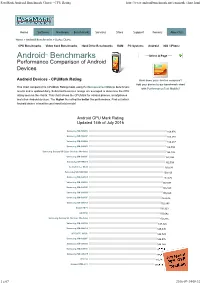
PassMark Android Benchmark Charts - CPU Rating http://www.androidbenchmark.net/cpumark_chart.html Home Software Hardware Benchmarks Services Store Support Forums About Us Home » Android Benchmarks » Device Charts CPU Benchmarks Video Card Benchmarks Hard Drive Benchmarks RAM PC Systems Android iOS / iPhone Android TM Benchmarks ----Select A Page ---- Performance Comparison of Android Devices Android Devices - CPUMark Rating How does your device compare? Add your device to our benchmark chart This chart compares the CPUMark Rating made using PerformanceTest Mobile benchmark with PerformanceTest Mobile ! results and is updated daily. Submitted baselines ratings are averaged to determine the CPU rating seen on the charts. This chart shows the CPUMark for various phones, smartphones and other Android devices. The higher the rating the better the performance. Find out which Android device is best for your hand held needs! Android CPU Mark Rating Updated 14th of July 2016 Samsung SM-N920V 166,976 Samsung SM-N920P 166,588 Samsung SM-G890A 166,237 Samsung SM-G928V 164,894 Samsung Galaxy S6 Edge (Various Models) 164,146 Samsung SM-G930F 162,994 Samsung SM-N920T 162,504 Lemobile Le X620 159,530 Samsung SM-N920W8 159,160 Samsung SM-G930T 157,472 Samsung SM-G930V 157,097 Samsung SM-G935P 156,823 Samsung SM-G930A 155,820 Samsung SM-G935F 153,636 Samsung SM-G935T 152,845 Xiaomi MI 5 150,923 LG H850 150,642 Samsung Galaxy S6 (Various Models) 150,316 Samsung SM-G935A 147,826 Samsung SM-G891A 145,095 HTC HTC_M10h 144,729 Samsung SM-G928F 144,576 Samsung -
Ethernet Access and Remote Control with Intel Galileo Prepared By
Ethernet Access and Remote Control with Intel Galileo Prepared by Derrick Anang For EECE456 Embedded Systems Design Lab Instructor: Dr. Charles Kim Electrical and Computer Engineering Howard University Class Web: www.mwftr.com/emblab.html 1 INTEL® GALILEO ∗ Intel® Galileo Gen2 Board A microcontroller board based on the Intel® Quark SoC X1000 application processor (a 32-bit Intel® Pentium brand system on a chip). The 32-bit processor can run at up to 400MHz and has a 512KB SRAM built in. This board functions as a fully featured, cost-effective development platform which complements with the Arduino software to provide an advanced compute functionality. It basically serves as an interface between the Arduino Software (IDE) and the Grove system components. ∗ It comes with an on-board 10/100 Mb/s Ethernet connector port. ∗ This on-board Ethernet port is accessible via Linux and Arduino IDE using the Ethernet Library. 2 GETTING STARTED HARDWARE COMPONENTS ∗ Intel® Galileo Gen 2 Board ∗ Micro-SD Card ∗ USB to 6-pin FTDI Serial Cable ∗ Ethernet Cable ∗ Grove Starter Kit ∗ An Ethernet Switch or Wi-Fi Router with a free Ethernet port (connects Galileo board to the Local Access Network (LAN) being used) ∗ Micro B to Type A USB Cable ∗ 12 VDC, 1.5A Power Supply 3 SOFTWARE COMPONENTS ∗ Arduino Integrated Development Environment (IDE) for Galileo ∗ Intel XDK IoT Edition (Download link: http://software.intel.com/en- us/html5/xdk-iot) ∗ Terminal Emulator e.g. PuTTy (http://www.putty.org/)or Bonjour Browser for Mac OS, link: (http://www.tildesoft.com/files/BonjourBrowser.dmg) -

An Efficient Solution of Technological Thrust for Iot in COVID-19
International Journal of Engineering in Computer Science 2020; 2(2): 30-33 E-ISSN: 2663-3590 P-ISSN: 2663-3582 IJECS 2020; 2(2): 30-33 An efficient solution of technological thrust for IoT in Received: 22-05-2020 Accepted: 24-06-2020 COVID-19 era Rakesh Kumar RNTU, Bhopal, Rakesh Kumar, Pratishtha Bowade and Rajiv Saxena Madhya Pradesh, India Pratishtha Bowade Abstract SIRT, Bhopal, The stringent connectedness between the digital and physical world is referred to as IoT (Internet of Madhya Pradesh, India Things). In the COVID-19 era, technology is being implemented in a rigorous manner to handle and balance the situation. Internet of Things (IoT) technology is playing a great role in all the aspects. In Rajiv Saxena this research paper researcher compare four hardware platforms and concluded the best suitability of SIRT, Bhopal, the hardware platform. Researchers provide the solution to the technological thrust for the IoT in terms Madhya Pradesh, India of the hardware platform. Keywords: internet of things, COVID-19, technological thrust, hardware platforms Introduction The term "Internet of Things" is used as a keyword to cover various aspects related to Internet and Web expansion in the physical space, through the widespread deployment of distributed geographical devices with integrated use of Internet-Things that foresees the future where digital and physical objects can be linked, through relevant knowledge and [1] communication technologies, enabling a whole new category of applications and services . The Internet of Things (IoT) is one of the most promising research topics in engineering and business. It is believed that the IoT will revolutionize the way people live in the near future by connecting ordinary things with each other remotely and establishing channels of communication between them.