Iceberg Calving Dynamics of Jakobshavn Isbrę, Greenland
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
100 Magic Water Words
WaterCards.(WebFinal).qxp 6/15/06 8:10 AM Page 1 estuary ocean backwater canal ice flood torrent snowflake iceberg wastewater 10 0 ripple tributary pond aquifer icicle waterfall foam creek igloo cove Water inlet fish ladder snowpack reservoir sleet Words slough shower gulf rivulet salt lake groundwater sea puddle swamp blizzard mist eddy spillway wetland harbor steam Narcissus surf dew white water headwaters tide whirlpool rapids brook 100 Water Words abyssal runoff snow swell vapor EFFECT: Lay 10 cards out blue side up. Ask a participant to mentally select a word and turn the card with the word on it over. You turn all marsh aqueduct river channel saltwater the other cards over and mix them up. Ask the participant to point to the card with his/her water table spray cloud sound haze word on it. You magically tell the word selected. KEY: The second word from the top on the riptide lake glacier fountain spring white side is a code word for a number from one to ten. Here is the code key: Ocean = one (ocean/one) watershed bay stream lock pool Torrent = two (torrent/two) Tributary = three (tributary/three) Foam = four (foam/four) precipitation lagoon wave crest bayou Fish ladder = five (fish ladder/five) Shower = six (shower/six) current trough hail well sluice Sea = seven (sea/seven) Eddy = eight (eddy/eight) Narcissus = nine (Narcissus/nine) salt marsh bog rain breaker deluge Tide = ten (tide/ten) Notice the code word on the card that is first frost downpour fog strait snowstorm turned over. When the second card is selected the chosen word will be the secret number inundation cloudburst effluent wake rainbow from the top. -
Lecture 21: Glaciers and Paleoclimate Read: Chapter 15 Homework Due Thursday Nov
Learning Objectives (LO) Lecture 21: Glaciers and Paleoclimate Read: Chapter 15 Homework due Thursday Nov. 12 What we’ll learn today:! 1. 1. Glaciers and where they occur! 2. 2. Compare depositional and erosional features of glaciers! 3. 3. Earth-Sun orbital parameters, relevance to interglacial periods ! A glacier is a river of ice. Glaciers can range in size from: 100s of m (mountain glaciers) to 100s of km (continental ice sheets) Most glaciers are 1000s to 100,000s of years old! The Snowline is the lowest elevation of a perennial (2 yrs) snow field. Glaciers can only form above the snowline, where snow does not completely melt in the summer. Requirements: Cold temperatures Polar latitudes or high elevations Sufficient snow Flat area for snow to accumulate Permafrost is permanently frozen soil beneath a seasonal active layer that supports plant life Glaciers are made of compressed, recrystallized snow. Snow buildup in the zone of accumulation flows downhill into the zone of wastage. Glacier-Covered Areas Glacier Coverage (km2) No glaciers in Australia! 160,000 glaciers total 47 countries have glaciers 94% of Earth’s ice is in Greenland and Antarctica Mountain Glaciers are Retreating Worldwide The Antarctic Ice Sheet The Greenland Ice Sheet Glaciers flow downhill through ductile (plastic) deformation & by basal sliding. Brittle deformation near the surface makes cracks, or crevasses. Antarctic ice sheet: ductile flow extends into the ocean to form an ice shelf. Wilkins Ice shelf Breakup http://www.youtube.com/watch?v=XUltAHerfpk The Greenland Ice Sheet has fewer and smaller ice shelves. Erosional Features Unique erosional landforms remain after glaciers melt. -

Minimal Geological Methane Emissions During the Younger Dryas-Preboreal Abrupt Warming Event
UC San Diego UC San Diego Previously Published Works Title Minimal geological methane emissions during the Younger Dryas-Preboreal abrupt warming event. Permalink https://escholarship.org/uc/item/1j0249ms Journal Nature, 548(7668) ISSN 0028-0836 Authors Petrenko, Vasilii V Smith, Andrew M Schaefer, Hinrich et al. Publication Date 2017-08-01 DOI 10.1038/nature23316 Peer reviewed eScholarship.org Powered by the California Digital Library University of California LETTER doi:10.1038/nature23316 Minimal geological methane emissions during the Younger Dryas–Preboreal abrupt warming event Vasilii V. Petrenko1, Andrew M. Smith2, Hinrich Schaefer3, Katja Riedel3, Edward Brook4, Daniel Baggenstos5,6, Christina Harth5, Quan Hua2, Christo Buizert4, Adrian Schilt4, Xavier Fain7, Logan Mitchell4,8, Thomas Bauska4,9, Anais Orsi5,10, Ray F. Weiss5 & Jeffrey P. Severinghaus5 Methane (CH4) is a powerful greenhouse gas and plays a key part atmosphere can only produce combined estimates of natural geological in global atmospheric chemistry. Natural geological emissions and anthropogenic fossil CH4 emissions (refs 2, 12). (fossil methane vented naturally from marine and terrestrial Polar ice contains samples of the preindustrial atmosphere and seeps and mud volcanoes) are thought to contribute around offers the opportunity to quantify geological CH4 in the absence of 52 teragrams of methane per year to the global methane source, anthropogenic fossil CH4. A recent study used a combination of revised 13 13 about 10 per cent of the total, but both bottom-up methods source δ C isotopic signatures and published ice core δ CH4 data to 1 −1 2 (measuring emissions) and top-down approaches (measuring estimate natural geological CH4 at 51 ± 20 Tg CH4 yr (1σ range) , atmospheric mole fractions and isotopes)2 for constraining these in agreement with the bottom-up assessment of ref. -
Sea Level and Climate Introduction
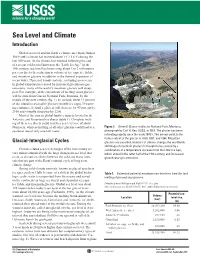
Sea Level and Climate Introduction Global sea level and the Earth’s climate are closely linked. The Earth’s climate has warmed about 1°C (1.8°F) during the last 100 years. As the climate has warmed following the end of a recent cold period known as the “Little Ice Age” in the 19th century, sea level has been rising about 1 to 2 millimeters per year due to the reduction in volume of ice caps, ice fields, and mountain glaciers in addition to the thermal expansion of ocean water. If present trends continue, including an increase in global temperatures caused by increased greenhouse-gas emissions, many of the world’s mountain glaciers will disap- pear. For example, at the current rate of melting, most glaciers will be gone from Glacier National Park, Montana, by the middle of the next century (fig. 1). In Iceland, about 11 percent of the island is covered by glaciers (mostly ice caps). If warm- ing continues, Iceland’s glaciers will decrease by 40 percent by 2100 and virtually disappear by 2200. Most of the current global land ice mass is located in the Antarctic and Greenland ice sheets (table 1). Complete melt- ing of these ice sheets could lead to a sea-level rise of about 80 meters, whereas melting of all other glaciers could lead to a Figure 1. Grinnell Glacier in Glacier National Park, Montana; sea-level rise of only one-half meter. photograph by Carl H. Key, USGS, in 1981. The glacier has been retreating rapidly since the early 1900’s. -

Calving Processes and the Dynamics of Calving Glaciers ⁎ Douglas I
Earth-Science Reviews 82 (2007) 143–179 www.elsevier.com/locate/earscirev Calving processes and the dynamics of calving glaciers ⁎ Douglas I. Benn a,b, , Charles R. Warren a, Ruth H. Mottram a a School of Geography and Geosciences, University of St Andrews, KY16 9AL, UK b The University Centre in Svalbard, PO Box 156, N-9171 Longyearbyen, Norway Received 26 October 2006; accepted 13 February 2007 Available online 27 February 2007 Abstract Calving of icebergs is an important component of mass loss from the polar ice sheets and glaciers in many parts of the world. Calving rates can increase dramatically in response to increases in velocity and/or retreat of the glacier margin, with important implications for sea level change. Despite their importance, calving and related dynamic processes are poorly represented in the current generation of ice sheet models. This is largely because understanding the ‘calving problem’ involves several other long-standing problems in glaciology, combined with the difficulties and dangers of field data collection. In this paper, we systematically review different aspects of the calving problem, and outline a new framework for representing calving processes in ice sheet models. We define a hierarchy of calving processes, to distinguish those that exert a fundamental control on the position of the ice margin from more localised processes responsible for individual calving events. The first-order control on calving is the strain rate arising from spatial variations in velocity (particularly sliding speed), which determines the location and depth of surface crevasses. Superimposed on this first-order process are second-order processes that can further erode the ice margin. -

2007 – 2008 – Roger Moe, Former Democratic Letter from Will Steger
ANNUAL REPORT 2007–2008 INSPIRE EMPOWER EDUCATE SOLAR WIND TABLE OF CONTENTS 1 The Will Steger Foundation (WSF) is dedicated to creating programs that foster international “ [Will Steger and the leadership and cooperation through environmental education and policy. WSF] were the ones that brought the left and the WSF seeks to inspire, educate and empower the world to understand the threat of and solutions right into the center on to global warming. this issue [global warm- CHANGE ACTION ing].” ANNUAL REPORT 2007 – 2008 – Roger Moe, former Democratic Letter from Will Steger...................................................................................................... 2 Congressman Letter from the Executive Director ................................................................................... 4 Fostering Leadership and International Cooperation ...................................................... 6 Inspiring Others through the Eyewitness Account .......................................................... 8 Empowering Others through Education ........................................................................ 10 Global Warming 101 initiative ....................................................................................... 18 Media Outreach .............................................................................................................. 24 Supporters ....................................................................................................................... 26 2801 21st Avenue South, Suite -

Comparison of Remote Sensing Extraction Methods for Glacier Firn Line- Considering Urumqi Glacier No.1 As the Experimental Area
E3S Web of Conferences 218, 04024 (2020) https://doi.org/10.1051/e3sconf/202021804024 ISEESE 2020 Comparison of remote sensing extraction methods for glacier firn line- considering Urumqi Glacier No.1 as the experimental area YANJUN ZHAO1, JUN ZHAO1, XIAOYING YUE2and YANQIANG WANG1 1College of Geography and Environmental Science, Northwest Normal University, Lanzhou, China 2State Key Laboratory of Cryospheric Sciences, Northwest Institute of Eco-Environment and Resources/Tien Shan Glaciological Station, Chinese Academy of Sciences, Lanzhou, China Abstract. In mid-latitude glaciers, the altitude of the snowline at the end of the ablating season can be used to indicate the equilibrium line, which can be used as an approximation for it. In this paper, Urumqi Glacier No.1 was selected as the experimental area while Landsat TM/ETM+/OLI images were used to analyze and compare the accuracy as well as applicability of the visual interpretation, Normalized Difference Snow Index, single-band threshold and albedo remote sensing inversion methods for the extraction of the firn lines. The results show that the visual interpretation and the albedo remote sensing inversion methods have strong adaptability, alonger with the high accuracy of the extracted firn line while it is followed by the Normalized Difference Snow Index and the single-band threshold methods. In the year with extremely negative mass balance, the altitude deviation of the firn line extracted by different methods is increased. Except for the years with extremely negative mass balance, the altitude of the firn line at the end of the ablating season has a good indication for the altitude of the balance line. -
Download Itinerary
HIGH ARCTIC EXPLORER REVERSE TRIP CODE ACACHA DEPARTURE 02/08/2022, 25/07/2023 DURATION INTRODUCTION 12 Days LOCATIONS BOOK AND SAVE: Book by 30 November to save up to 15% off select cabins and departures* Greenland and Canada Jump aboard the Ocean Endeavour for 11 days and cruise in comfort from Kangerlussuaq to Qaqsuittuq (resolute Bay, Nunavut). This is the high Arctic at the height of summer and you will be rewarded with the history, culture, marine life and glittering scenery of this region. Highlights include a visit to Beechey Island National Historic Site; Tallurutiup Imanga National Marine Protected Area; an Inuit cultural welcome at Mittimatilik; cruise amid icebergs at Jakobshavn Glacier (a UNESCO World Heritage Site) and explore Greenlandâs beautiful west coast. This journey starts in Toronto with a charter flight Northbound and ends with a charter flight southbound to Ottawa. There is the opportunity to do it in reverse from Ottawa to Toronto on certain dates. *Offers aboard the Ocean Endeavour end 30 November 2021 subject to availability. Not combinable with any other promotion. Applies to voyage only; cabins limited. Subject to availability and currency fluctuations. Further conditions apply, contact us for more information. ITINERARY DAY 1: Arrival and Embarkation in Kangerlussuaq Kangerlussuaq is a former U.S. Air Force base and Greenland’s primary flight hub. Here we will be transferred by Zodiac to the Ocean Endeavour. With 190 kilometres of superb scenery, Kangerlussuaq Fjord (Sondre Stromfjord) is one of the longest fjords in the world. We begin our adventure by sailing down this dramatic fjord, crossing the Arctic Circle as we go. -

Ilulissat Icefjord
World Heritage Scanned Nomination File Name: 1149.pdf UNESCO Region: EUROPE AND NORTH AMERICA __________________________________________________________________________________________________ SITE NAME: Ilulissat Icefjord DATE OF INSCRIPTION: 7th July 2004 STATE PARTY: DENMARK CRITERIA: N (i) (iii) DECISION OF THE WORLD HERITAGE COMMITTEE: Excerpt from the Report of the 28th Session of the World Heritage Committee Criterion (i): The Ilulissat Icefjord is an outstanding example of a stage in the Earth’s history: the last ice age of the Quaternary Period. The ice-stream is one of the fastest (19m per day) and most active in the world. Its annual calving of over 35 cu. km of ice accounts for 10% of the production of all Greenland calf ice, more than any other glacier outside Antarctica. The glacier has been the object of scientific attention for 250 years and, along with its relative ease of accessibility, has significantly added to the understanding of ice-cap glaciology, climate change and related geomorphic processes. Criterion (iii): The combination of a huge ice sheet and a fast moving glacial ice-stream calving into a fjord covered by icebergs is a phenomenon only seen in Greenland and Antarctica. Ilulissat offers both scientists and visitors easy access for close view of the calving glacier front as it cascades down from the ice sheet and into the ice-choked fjord. The wild and highly scenic combination of rock, ice and sea, along with the dramatic sounds produced by the moving ice, combine to present a memorable natural spectacle. BRIEF DESCRIPTIONS Located on the west coast of Greenland, 250-km north of the Arctic Circle, Greenland’s Ilulissat Icefjord (40,240-ha) is the sea mouth of Sermeq Kujalleq, one of the few glaciers through which the Greenland ice cap reaches the sea. -

An Analytical Model of Iceberg Drift
JULY 2017 W A G N E R E T A L . 1605 An Analytical Model of Iceberg Drift TILL J. W. WAGNER,REBECCA W. DELL, AND IAN EISENMAN University of California, San Diego, La Jolla, California (Manuscript received 2 December 2016, in final form 6 April 2017) ABSTRACT The fate of icebergs in the polar oceans plays an important role in Earth’s climate system, yet a detailed understanding of iceberg dynamics has remained elusive. Here, the central physical processes that determine iceberg motion are investigated. This is done through the development and analysis of an idealized model of iceberg drift. The model is forced with high-resolution surface velocity and temperature data from an obser- vational state estimate. It retains much of the most salient physics, while remaining sufficiently simple to allow insight into the details of how icebergs drift. An analytical solution of the model is derived, which highlights how iceberg drift patterns depend on iceberg size, ocean current velocity, and wind velocity. A long-standing rule of thumb for Arctic icebergs estimates their drift velocity to be 2% of the wind velocity relative to the ocean current. Here, this relationship is derived from first principles, and it is shown that the relationship holds in the limit of small icebergs or strong winds, which applies for typical Arctic icebergs. For the opposite limit of large icebergs (length . 12 km) or weak winds, which applies for typical Antarctic tabular icebergs, it is shown that this relationship is not applicable and icebergs move with the ocean current, unaffected by the wind. -

PRESS RELEASE Icebergs A-70 and A-71 Calve from Larsen-D Ice Shelf in the Weddell
U.S. National Ice Center NOAA Satellite Operations Facility 4231 Suitland Road Suitland, MD 20746 PRESS RELEASE FOR IMMEDIATE RELEASE Contact: LT Falon Essary, NOAA [email protected] 3 01-817-3934 Icebergs A-70 and A-71 Calve from Larsen-D Ice Shelf in the Weddell Sea 08JAN2021, Suitland, MD — The Larsen-D Ice Shelf calved several icebergs in a calving event, two of which are large enough to be named. The breakup occurred in early November 2020, but until now it had been impossible to confirm whether these were icebergs large enough to be named or extremely old sea ice that had fasted to the ice shelf. Recent imagery showing surface topography typical of icebergs has allowed us to confirm these are indeed icebergs. The new iceberg A-70 is located at 72° 21' South, 59° 39' West and measures 8 nautical miles on its longest axis and 5 nautical miles on its widest axis. The new iceberg A-71 is located at 72° 31' South, 59° 31' West and measures 8 nautical miles on its longest axis and 3 nautical miles on its widest axis. A-70 and A-71 were first spotted by USNIC Ice Analyst Michael Lowe and confirmed by USNIC Ice Analyst Chris Readinger using the Sentinel-1A image shown below. Iceberg names are derived from the Antarctic quadrant in which they were originally sighted. The quadrants are divided counter-clockwise in the following manner: A = 0-90W (Bellingshausen/Weddell Sea) C = 180-90E (Western Ross Sea/Wilkesland) B = 90W-180 (Amundsen/Eastern Ross Sea) D = 90E-0 (Amery/Eastern Weddell Sea) When first sighted, an iceberg’s point of origin is documented by USNIC. -

SAR Image Observations of the A-68 Iceberg Drift Ludwin Lopez-Lopez1, Flavio Parmiggiani2, Miguel Moctezuma-Flores 1, and Lorenzo Guerrieri3 1UNAM, Fac
https://doi.org/10.5194/tc-2020-180 Preprint. Discussion started: 21 July 2020 c Author(s) 2020. CC BY 4.0 License. SAR image observations of the A-68 iceberg drift Ludwin Lopez-Lopez1, Flavio Parmiggiani2, Miguel Moctezuma-Flores 1, and Lorenzo Guerrieri3 1UNAM, Fac. Ingenieria, Cd. Universitaria, CDMX, 01430, Mexico 2CNR Institute of Polar Sciences, via Gobetti 101, Bologna, 40129, Italy 3INGV, via di Vigna Murata 605, Rome, 00143, Italy Correspondence: M. Moctezuma-Flores (mmoctezuma@fi-b.unam.mx) Abstract. A methodology for examining a temporal sequence of Synthetic Aperture Radar (SAR) images as applied to the detection of the A-68 iceberg and its drifting trajectory, is presented. Using an improved image processing scheme, the analysis covers a period of eighteen months and makes use of a set of Sentinel-1 images. A-68 iceberg calved from the Larsen C ice shelf in July 2017 and is one of the largest icebergs observed by remote sensing on record. After the calving, there was only a modest 5 decrease in the area (about 1%) in the first six months. It has been drifting along the east coast of the Antarctic Peninsula and it is expected to continue its path for more than a decade. It is important to track the huge A-68 iceberg to retrieve information on the physics of iceberg dynamics and for maritime security reasons. Two relevant problems are addressed by the image processing scheme presented here: (a) How to achieve quasi-automatic analysis using a fuzzy logic approach to image contrast enhancement, and (b) Adoption of ferromagnetic concepts to define a stochastic segmentation.