The CFD Module User's Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

HVAC SYSTEM PRESSURE RELIEF Correcting Pressure Imbalances in Your HVAC System Can Result in a Healthier, More Efficient Home
HVAC SYSTEM PRESSURE RELIEF Correcting pressure imbalances in your HVAC system can result in a healthier, more efficient home. BY PAUL H. RAYMER AND NEIL MOYER grows mold, which may not be HVAC noticed for a long time. The Florida Solar Energy Cen- ithout central ter (FSEC) and my company, air condi- Tamarack Technologies, Incorpo- Wtioning, the rated, decided to test a variety of South wouldn’t be what it is pressure relief solutions to see today. Central air conditioning which worked best to solve these has made living in the South pressure problems. year-round a real pleasure, but it has also created its own set of Equalizing problems—including the subtle Circulation but critical problem of pressures that differ from room to room. Ideally, forced-air heating and To keep the installed costs of cooling systems circulate an equal air conditioning down, it became volume of return air and supply common practice to put supplies air through the conditioning sys- into each room and use a central tem, keeping air pressure in the return, eliminating individual house neutral. Each conditioned return runs. Rooms can serve as space in the building should, ide- ducts as long as all the doors in ally,be at neutral air pressure at all the house stay open. As soon as times.When the building is under doors, working as dampers, start a positive air pressure, indoor air to close, the system changes. RAYMER PAUL will be pushed outward to uncon- Uneven pressures are created, and ditioned spaces and beyond to system performance and comfort outside. -

Experimental Study of Forced Convective Heat Transfer in Grille-Particle Composite Packed Beds
International Journal of Heat and Mass Transfer 129 (2019) 103–112 Contents lists available at ScienceDirect International Journal of Heat and Mass Transfer journal homepage: www.elsevier.com/locate/ijhmt Experimental study of forced convective heat transfer in grille-particle composite packed beds ⇑ Yingxue Hu a, Jingyu Wang a, Jian Yang a,b, , Issam Mudawar b, Qiuwang Wang a a Key Laboratory of Thermo-Fluid Science and Engineering, Ministry of Education, School of Energy and Power Engineering, Xi’an Jiaotong University, Xi’an, Shaanxi 710049, PR China b Purdue University Boiling and Two-Phase Flow Laboratory (PU-BTPFL), School of Mechanical Engineering, 585 Purdue Mall, West Lafayette, IN 47907, USA article info abstract Article history: Due to high surface area-to-volume ratio and superior thermal performance, packed beds are widely used Received 7 August 2018 in variety of industries. In the present study, forced convective heat transfer in a novel grille-particle Received in revised form 15 September composite packing (GPCP) bed, was experimentally investigated in pursuit of reduced pressure drop 2018 and enhanced overall heat transfer. The effects of sub-channel to particle diameter ratio, grille thickness Accepted 20 September 2018 and grille thermal conductivity on pressure drop, Nusselt number and overall heat transfer efficiency in Available online 25 October 2018 the grille-particle channel were carefully analyzed. And performances of grille-particle channels were compared with those of random particle channels in detail. It is shown that looser packing structure com- Keywords: promises heat transfer in the grille-particle channel, while decreasing pressure drop and improving over- Packed bed Grille-particle composite packing all heat transfer efficiency. -
Laminar Flow Diffuser with Integrated High Efficiency Filter LFDCX Series E-124
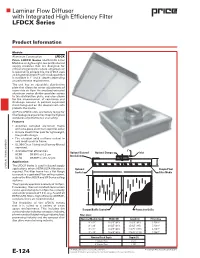
Laminar Flow Diffuser with Integrated High Efficiency Filter LFDCX Series Product Information Models Aluminum Construction LFDCX Price LFDCX Series HEPA/ULPA Filter Modules are lightweight, low profile ducted supply modules that are designed for critical environments where ultraclean air is required. To achieve this, the LFDCX uses an integrated Dimple Pleat® media pack that is available in 2” and 4” depths depending on performance requirements. The unit has an adjustable distribution plate that allows for minor adjustments of room-side air flow. An anodized extruded aluminum center divider provides access to this distribution plate, and also allows for the measurement of resistance and challenge aerosol. A painted expanded metal faceguard on the downstream side protects the media. All Price LFDCX units are factory tested for filter leakage to ensure they meet the highest standards of performance and safety. Features • Anodized extruded aluminum frame with one-piece aluminum top/inlet collar • Dimple Pleat® filter pack for lightweight, low profile design. • Fire retardant solid urethane sealant to seal media pack to frame. • UL 900 Class 1 listed and Factory Mutual approved. • Available filter efficiencies: 3” Optional External Optional Damper Inlet HEPA 99.99% at 0.3 μm Insulation ULPA 99.9995% at 0.12 μm Application D TICAL ENVIRONMENTS The LFDCX Series is used in ducted supply CRI applications where HEPA/ULPA filtration is Optional Dimple Pleat required. The filter frame has a flat flange Gasket L Filter Media to mount in a gasketed T-bar ceiling system, such as the Price HDCR and CR Series ceiling systems. They typically operate at a velocity of 100 fpm. -

Passivent Aircool Ventilators 16/03/2018 06:45 Page 2
63677 Passivent Aircool Vent WEB 12pp_Passivent Aircool Ventilators 16/03/2018 06:45 Page 2 CI/SfB (57.7) Xy Uniclass Ss_65_40_33_56 March 2018 U-VALUE IMPROVED BY 22% AIRCOOL VENTILATORS HYBRID PLUS2 NEW AIRCOOL ................................ 63677 Passivent Aircool Vent WEB 12pp_Passivent Aircool Ventilators 16/03/2018 06:46 Page 3 ........................................................ AIRCOOL᭨ VENTILATORS ........................................................................... Passivent Aircool is a range of controllable insulated ventilators primarily for BENEFITS installation in external façades in commercial and similar buildings. ● Improved insulated internal dampers provide a superior U-value as low as The electrically-actuated dampers provide 0.86W/m2K when closed, to minimise controlled air intake and extract in natural heat loss. Contents ventilation systems, and may also be used ● Primary construction materials are Aircool ventilators 2, 3, 4, 5 for air intake or extract in mechanical aluminium and ABS, which are 100% ventilation systems. They are particularly NEW Hybrid Plus2 Aircool® 6, 7 recyclable. suitable for night cooling strategies, where Electrically-actuated low-voltage Thermal Aircool 8 daytime heat build-up is dissipated from the ● dampers provide optimum safety and structure during the night, producing lower Acoustic Aircool 9 flexibility, with virtually silent internal air temperatures with a reduced modulating operation. Other applications 10, 11 need for daytime cooling or air conditioning. ● Designed to be installed in masonry Further information 12 Natural ventilation methods can save energy, reduce greenhouse gas emissions, and walls, curtain walling, window frames reduce or eliminate the capital and running or profiled sheet cladding. costs of ventilation or air conditioning plant. ● Excellent airtightness performance when closed. ● Excellent weather protection and security are provided by the external weather louvre, even when the internal insulated louvre is open. -

Heat Recovery Ventilation Guide for Houses
Heat Recovery Ventilation Guide for Houses Purpose of the Guide This guide will assist designers, developers, builders, renovators and owners gain a better understanding of heat recovery ventilators (HRVs) and energy recovery ventilators (ERVs) and how they can support healthy indoor living environments in single family, semi‐detached and row housing (herein referred to as “houses”), including: Why ventilating houses is important; Existing residential ventilation system code requirements; How HRVs and ERVs work; The importance of early planning to facilitate HRV/ERV installation and to ensure efficient and effective operation; System design considerations for both new houses and existing house retrofits; and Important balancing, commissioning, maintenance and operation considerations. This publication is not intended to replace the training materials developed for residential mechanical ventilation system design and installation contractors. Heat Recovery Ventilation Guide for Houses i Acknowledgments This guide would not have been possible without the funding and technical expertise provided by BC Hydro Power Smart, the City of Vancouver, Natural Resources Canada – CanmetENERGY, and Canada Mortgage and Housing Corporation (CMHC). The Homeowner Protection Office (HPO) would like to thank the members of the Technical Steering Committee for their time and contributions. Acknowledgment is also extended to RDH Building Engineering Ltd. who was responsible for the development of the guide. Disclaimer This guide reflects an overview of current good practice in the design and installation of residential heat recovery ventilation systems; however, it is not intended to replace professional design and installation guidelines. When information presented in this guide is incorporated into a specific building project, it must respond to the unique conditions and design parameters of that building. -
Heat Transfer Module Application Library
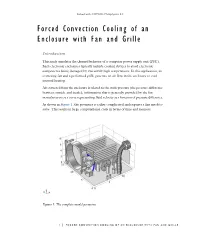
Solved with COMSOL Multiphysics 5.2 Forced Convection Cooling of an Enclosure with Fan and Grille Introduction This study simulates the thermal behavior of a computer power supply unit (PSU). Such electronic enclosures typically include cooling devices to avoid electronic components being damaged by excessively high temperatures. In this application, an extracting fan and a perforated grille generate an air flow in the enclosure to cool internal heating. Air extracted from the enclosure is related to the static pressure (the pressure difference between outside and inside), information that is generally provided by the fan manufacturers as a curve representing fluid velocity as a function of pressure difference. As shown in Figure 1, the geometry is rather complicated and requires a fine mesh to solve. This results in large computational costs in terms of time and memory. Figure 1: The complete model geometry. 1 | FORCED CONVECTION COOLING OF AN ENCLOSURE WITH FAN AND GRILLE Solved with COMSOL Multiphysics 5.2 Model Definition Figure 1 shows the geometry of the PSU. It is composed of a perforated enclosure of 14 cm-by-15 cm-by-8.6 cm and is made of aluminum 6063-T83. Inside the enclosure, only obstacles having a characteristic length of at least 5 mm are represented. The bottom of the box represents the printed circuit board (PCB). It has an anisotropic thermal conductivity of 10, 10, and 0.36 W/(m·K) along the x-, y-, and z-axes, respectively. Its density is 430 kg/m3 and its heat capacity at constant pressure is 1100 J/(kg·K). -

RREAL's Installation Manual for Solar Thermal Panels (Also Known As “Solar Powered Furnace/SPF”)
SPF Installation Manual Rural Renewable Energy Alliance (RREAL) MADE 2330 Dancing Wind Road SW, Suite 2 IN Pine River, MN 56474, USA MN [email protected] 218-587-4753 www.rreal.org All Rights Reserved 2010 Version 1.10 Table of Contents Figures Safety Warning............................................ 2 1. Fastening Mounting Rails to Structure.... 5 Important Concerns................................... 2 2. SPF Penetration Areas.................................. 6 3. Silicone Location on Starter Collar........... 7 Parts Definitions........................................ 3 4. Installation of Starter Collar....................... 7 Bill of Materials.......................................... 4 5. Installation of Thermistor........................... 7 Additional Materials................................... 4 6. Hang SPF on Mounting Rails..................... 8 1) Select Location........................................ 5 7. Silicone Location on AI Stint..................... 8 2) Hang Mounting Rails.............................. 5 8. Insulation and Back Draft Dampers......... 9 3) Make Penetrations................................... 6 9. Wiring Diagram............................................ 10 10. Extrusion Cut Location............................ 13 4) Prepare to Hang Panel............................ 7 11. Portrait Mounting Rails............................ 14 5) Hang First Panel....................................... 8 12. Landscape Mounting Rails........................ 15 6) Hang Additional Panels.......................... 8 13. -

Humidity Controlled Grilles HCG Spec and Technical Data
AIRFLOW & ZONE CONTROLS PRODUCT SPECIFICATIONS HCG & TECHNICAL Humidity-Controlled Grilles DATA APPLICATIONS The use of humidity-controlled exhaust grilles is limited to buildings where the relative humidity is a representative indicator of the physical occupancy of the individual rooms, primarily institutional and apartment/condominium living units. As part of a complete mechanical-exhaust system, the HCG is particularly adapted to: • Dormitories • Retirement centers • Nursing homes • Hotels and motels • Shower and locker rooms in schools, office buildings, exercise rooms, etc. ADVANTAGES • Energy conservation by demand-controlled ventilation DESCRIPTION • Comfort and quality of air Model HCG humidity-controlled grille is • Reduced moisture and condensation damage to the building a variable airflow exhaust terminal that • Extremely low sound levels automatically adjusts the airflow rate • Simple maintenance because all functioning parts are easily removed and according to the relative humidity of the designed to permit cleaning in a dishwasher space. Designed for mechanical exhaust • Large pressure range for the design airflow rates: from 0.3-0.6 in. wg. (70-150 Pa) systems in residential and institutional applications, this grille provides airflow COMPONENTS directly proportionate to the presence of The HCG is composed of: and activity level of occupants in the space. • Face cover in white ABS plastic • White grille (yellow, dark gray, red, and green available by special order) This control of the airflow rate permits • Duct connection -

Sizing Mechanical Ventilation S
5/13/2013 Educational Package Ventilation Lecture 8: Sizing mechanical ventilation systems IEE/09/631/SI2.558225 28.10.2011 Summary Introduction Air Flow : Relation between air flow, air speed and duct section… Ventilation design methodology: 1. Ventilation calculation 2. Number of fans & grilles 3. Drawings 4. Size duct work 5. Size fan IDES-EDU6. Size grilles & diffusers Duct cleaning Heat loss by ventilation How the sizing and placement of the ventilation ducts and unit influence the architecture 1 5/13/2013 Introduction Mechanical ventilation: ¾The process of changing air in an closed space ¾ Indoor air is with drawn and replaced by fresh air continuously from clean external source Mechanical or "forced" ventilation : is used to control indoor air quality need to protect the airway Volume vs. Pressure ventilation: • Volume ventilation: Volume is constant and pressure will vary with patient’s lung compliance. • Pressure ventilation: Pressure is constant and volume will vary with patient’s lung compliance. www. EngineeringToolBox.com 3 Air Flow Generalities ` Airflow – the mass/volume of air moved between two points ` Air speed – the speed of the air relative to its surroundings Duct air moves ¾ conservation of mass; 3 fundamentals lows: ¾ conservation of energy; IDES-EDU¾ conservation of momentum. Conservation of mass: V2 = (V1 * A1)/A2 Where: V - velocity A -area Energy conservation : (Pressure loss)1-2 = (Total pressure)1 - (Total pressure)2 4 http://www.captiveaire.com/MANUALS/AIRSYSTEMDESIGN/DESIGNAIRSYSTEMS.HTM 2 5/13/2013 Calculation -

Architectural Louver Grilles Are Available in a Wide Variety of Colors That Can Be Color Matched to the Exterior of the Design to Ensure Your Vision Remains Intact
NATIONAL® COMFORT PRODUCTS HEATING & A/C EQUIPMENT Thru-the-Wall Comfort for all types of Multi-Family Construction Architectural Options to Compliment any Design Enhance the appearance of your building with customizable louver grilles; designed to add functionality and appeal while adding protection to the condenser coil from weather and vandalism. Architectural Louver Grilles are available in a wide variety of colors that can be color matched to the exterior of the design to ensure your vision remains intact. Comfort Pack Architectural Louver Grille NATIONAL® National Comfort Products COMFORT A Division of National Refrigeration and Air Conditioning Products, Inc. 539 Dunksferry Road • Bensalem, PA 19020-5908 PRODUCTS (800) 523-7138 • Fax (215) 639-1674 Go Thru-the-Wall HEATING & A/C EQUIPMENT www.nationalcomfortproducts.com The Comfort Pack The Comfort Pack comes shipped with a factory installed stamped grille manufactured from pre-painted galvanized steel. Since the pre-painted steel is a neutral tan finish your design may already welcome the Comfort Pack unit as is with no additional louver option necessary. Here you can see what the Comfort Pack looks like standard. Comfort Pack Comfort Pack Color − Neutral tan finish Non Condensing Condensing Gas Gas Furnace Furnace & Electric Heat Grille is same color The Powder Coated Stamped Grille as sleeve The powder coated stamped grille is an economical option for matching or blending the Comfort Pack into your overall building design. This stamped grille is similar to the one that comes standard with the Comfort Pack with a few differences. The grille is made to fit the exterior dimension of the CPWS wall sleeve. -

Investigations on the Energy Efficiency of Stratified Air Distribution Systems with Different Diffuser Layouts
sustainability Article Investigations on the Energy Efficiency of Stratified Air Distribution Systems with Different Diffuser Layouts Yuanda Cheng 1,*, Jinming Yang 1,*, Zhenyu Du 1 and Jinqing Peng 2 1 College of Environmental Science and Engineering, Taiyuan University of Technology, Taiyuan 030024, China; [email protected] 2 College of Civil Engineering, Hunan University, Changsha 410082, China; [email protected] * Correspondence: [email protected] (Y.C.); [email protected] (J.Y.); Tel.: +86-351-317-3586 (Y.C.) Academic Editor: Marc A. Rosen Received: 27 May 2016; Accepted: 27 July 2016; Published: 30 July 2016 Abstract: This paper investigated the influence of diffuser layouts on the energy performance of stratified air distribution systems (STRAD). The energy saving potentials of STRAD systems are theoretically analyzed. The cooling coil load of a STRAD system is proportion to the return air temperature, while inversely proportional to the exhaust air temperature. Based on that, numerical studies are conducted for the applications of STRAD systems in three typical building space types. Two evaluation indices are developed to assess the energy performance of STRAD systems. The simulation results demonstrated that further energy saving could be achieved by keeping the exhaust grille at ceiling level and decreasing the height of return grille. Therefore, in order to optimize the energy saving capacity of STRAD systems, the return grille is recommended to be located as low as possible, whilst paying special attention on the “short-circuit” of cold supply air. Furthermore, when the STRAD system is applied in large space buildings with a big horizontal span, supply diffusers should be distributed surrounding the occupied zone as uniformly as possible, while avoiding installing return diffusers at exterior walls. -

Passive House Concept for Indoor Swimming Pools
Passive House concept for indoor swimming pools: Guidelines Published by Commissioned by Contents 1 Introduction ........................................................................................................................ 3 2 Building envelope ............................................................................................................... 6 2.1 Opaque building components ........................................................................................................ 8 2.2 Transparent building components ............................................................................................... 11 2.3 Thermal separation ...................................................................................................................... 12 2.4 Airtightness .................................................................................................................................. 13 3 Ventilation ......................................................................................................................... 14 3.1 Ventilation of the pool hall .......................................................................................................... 14 3.2 Ventilation in additional zones .................................................................................................... 23 4 Pool technology ............................................................................................................... 26 4.1 Electricity demand for pool water circulation ............................................................................