Lecture 20: Sampling 1 23456789101112131415161718192021222324252627282930313233343536373839404142434 44546474849505152535455565758596061626364656667686970717273747576777879808182 6.10 Sampling
6.10.1 Sampling Using an Impulse Train
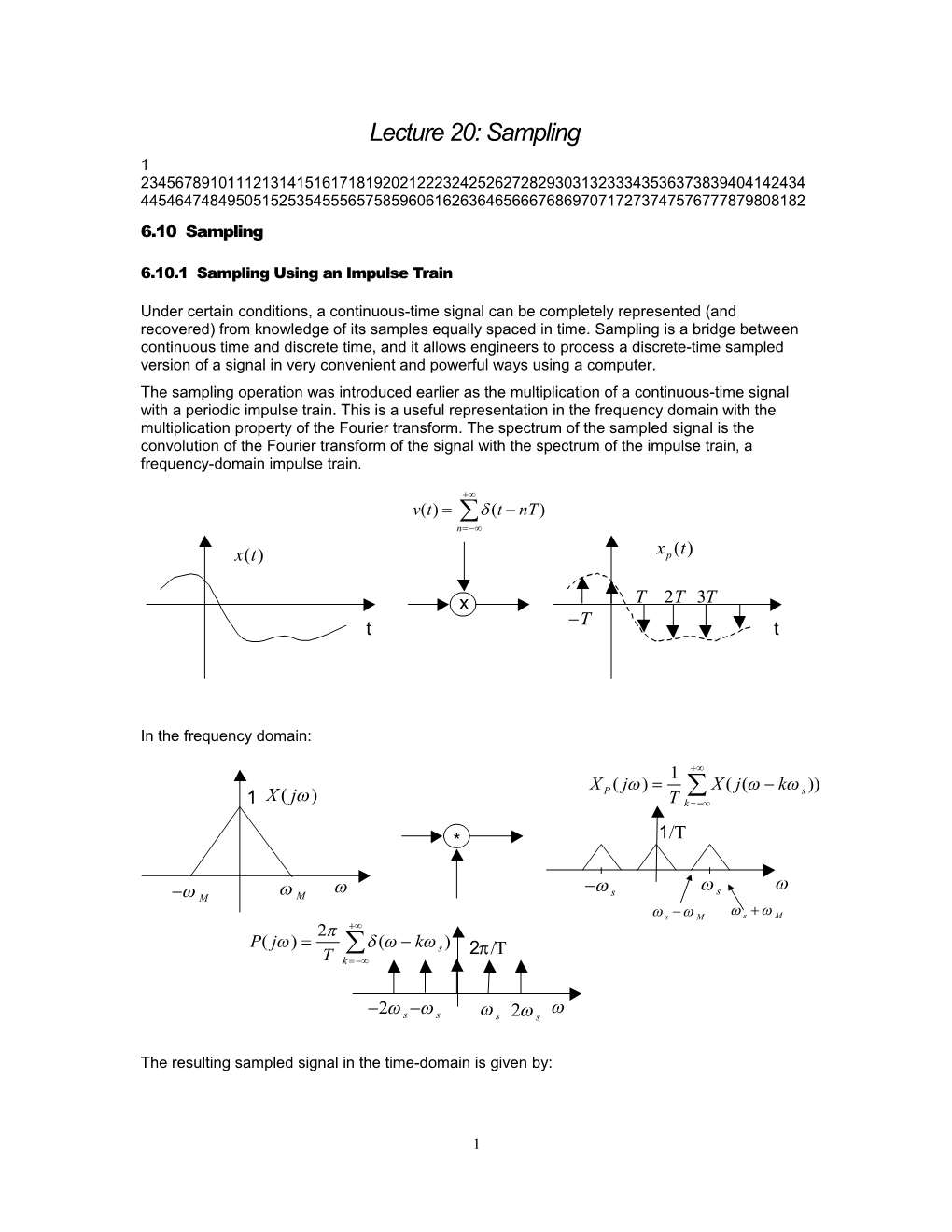
Under certain conditions, a continuous-time signal can be completely represented (and recovered) from knowledge of its samples equally spaced in time. Sampling is a bridge between continuous time and discrete time, and it allows engineers to process a discrete-time sampled version of a signal in very convenient and powerful ways using a computer. The sampling operation was introduced earlier as the multiplication of a continuous-time signal with a periodic impulse train. This is a useful representation in the frequency domain with the multiplication property of the Fourier transform. The spectrum of the sampled signal is the convolution of the Fourier transform of the signal with the spectrum of the impulse train, a frequency-domain impulse train.
v(t) (t nT) n
x(t) x p (t)
x T 2T 3T T t t
In the frequency domain:
1 X P ( j) X ( j( k s )) 1 X ( j) T k
* 1
s s M M
s M s M 2 P( j) ( k s ) 2 T k
2 s s s 2 s
The resulting sampled signal in the time-domain is given by:
1 x p (t) x(nT) (t nT) n where the impulse at time t nT has an area equal to the signal sample at that time. In the frequency domain, the spectrum of the sampled signal is a superposition of frequency- shifted replicas of the original signal spectrum, scaled by 1 T . 1 X P ( j) X ( j( k s )) T k
6.10.2 The Sampling Theorem
The extremely useful sampling theorem, or (Nyquist theorem, or Shannon theorem) gives a sufficient condition to recover a continuous-time signal from its samples x(nT), n . Sampling Theorem:
Let x(t) be a band-limited signal with X ( j) 0 for M . Then x(t) is uniquely determined by its samples x(nT), n if
s 2 M 2 where is the sampling frequency. s T
Given the signal samples, we can recover the signal x(t) by filtering x p (t) using an ideal lowpass filter with dc gain T and with cutoff frequency between M and s M .
x(t) x p (t) THlp ( j)
c=s/2
The sampling theorem expresses a fact that is easy to observe from the above example plot of
X p ( j) : The original spectrum centered at 0 can be recovered undistorted if it does not overlap with its neighboring replicas.
6.10.3 Sampling Using a Zero-Order Hold
The zero-order hold (ZOH) retains the value of the signal sample up until the following sampling instant. It basically produces a "staircase" signal from the samples. The ZOH consists of a sampling operation (multiplication by an impulse train), and filtering with an LTI system of impulse response h0 (t) , which is a unit pulse of duration equal to the sampling period T.
p(t) (t nT) x(t) n x0 (t) 1 h (t) x 0 2 T t ZOH Example:
x(t) ZOH x0 (t)
T 2T 3T t t
Note that the sampled signal x0 (t) carries the same amount of information as the samples themselves, so according to the sampling theorem, we should be able to recover the entire signal x(t) . It is indeed the case. From the above block diagram of the ZOH, all we need to do is to find the inverse of the system with impulse response h0 (t) , and then use a perfect lowpass filter. The j T frequency response H0 ( j) is given by (the usual sinc function, but multiplied by e 2 because of the time delay of T 2 seconds).
T j T j T sin( ) H ( j) Te 2 sinc T 2e 2 2 0 b2 g
The inverse of H0 ( j) is just
1 j T H ( j) H 1( j) e 2 1 0 T . 2 sin( 2 )
p(t) (t nT) x(t) n h (t) x (t) x p (t) x(t) 1 0 0 TH ( j) x H1( j) lp T t
ZOH
The reconstruction filter is the cascade of the inverse filter and the lowpass filter
Hr ( j) THlp ( j)H1( j) whose magnitude and phase plots are shown below.
Hr ( j) H ( j) r /2
1 s/2
s/2 /2 s/2 s/2 3
This frequency response cannot be realized exactly in practice, but it can be approximated with a causal filter. In fact, in many practical situations, it is often sufficient to use a simple (nonideal) lowpass filter with a relatively flat magnitude in the passband to recover a good approximation of the signal.
6.10.4 Signal Reconstruction
2 Let's assume that we have sampled a band-limited signal at a sampling frequency that s T satisfies the condition of the sampling theorem. What we have is basically a discrete-time signal
xd [n] x(nT) . As we have seen above, the ideal scenario to reconstruct the signal would be to construct a train of impulses x p (t) from the samples, and then to filter this signal with an ideal lowpass filter. In the time domain, this is equivalent to interpolating the samples using time-shifted sinc functions with zeros at nT for c s 2 as shown in the example below.
Perfect signal interpolation using sinc functions
-T T 2T 3T 4T 5T
-3T -2T t
This is clearly unfeasible, at least in real time. However, there is a number of ways to reconstruct the signal by using different types of interpolators and reconstruction filters.
Zero-Order Hold The zero-order hold offers a coarse way to interpolate the samples. It interpolates the signal samples with a constant segment over a sampling period, for each sample. Another way to look at it is to observe that the frequency response H0 ( j) is a (poor) approximation to the ideal lowpass filter characteristic.
First-Order Hold (linear interpolation) The first-order hold has a triangular impulse response instead of a rectangular pulse. The resulting interpolation is linear between each sample. It is closer to the signal than what a ZOH could do. In the frequency domain, the Fourier transform of h1(t) is also a better approximation to the ideal lowpass filter than H0 ( j) is.
4 p(t) (t nT) n x1 (t) x(t) 1 h1(t) x -T T t
FOH
x(t) FOH x1 (t)
T 2T 3T t t
6.10.5 Aliasing
Aliasing occurs when sampling is performed at a frequency that violates the sampling theorem.
1 X P ( j) X ( j( k s )) T k 1 X ( j) 1 *
s s M M s M s M 2 P( j) ( k s ) 2 T k
2 s s s 2 s
When a sampling frequency is too low to avoid overlap between spectra, we say that there is aliasing. Looking at the above example diagram, we see that the high frequencies in the replicas of the original spectrum shifted to the left and to the right by s get mixed with lower frequencies in the original spectrum centered at 0. With aliasing, the original signal cannot be recovered by lowpass filtering.
5 6