Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 49 Politechniki Wrocławskiej Nr 49
Studia i Materiały Nr 21 2000
Č.ONDRŮŠEK*, F.VESELKA*
ARTIFICIAL INTELLIGENCE USED IN HEAVY CURRENT ENGINEERING
The contribution deals with the optimisation of electromechanical and electrical systems using artificial intelligence. The practical examples of optimisation are presented.
1. INTRODUCTION
The use of artificial intelligence algorithms is useful for the solution of different practi- cal problems. The main reason for their use is the failure of classical numerical methods in case of great amount of computation and the problem with acceptable convergence to the minimum of penalty function. Artificial intelligence methods e.g. Genetic Algorithm (GA) and or Simulated Annealing (SA) overcome the above mentioned obstacles, do not require enormous mathematical knowledge of a designer and moreover they enable the optimisation in such cases in which the optimisation by classical methods was unable.
2. ALGORITHM OF ARTIFICIAL INTELLIGENCE
There is a great deal of Artificial Intelligence (AI) algorithms, which are frequently used in the technology of knowledge-base, digital image processing and evolotionary opti- misation methods such as (GA) and (SA) which were used for optimisation in this article.
2.1. OPTIMISATION OF INDUCTION MOTOR
Genetic Algorithm was used in optimisation of induction motor. The parameters se- lected for generation process are in Tab. 1.
* Fakulta elektrotechniky a informatiky, Ústav výkonové elektrotechniky a elektroniky, ÚVEE FEI VUT v Brně, CZ. Technická 8, Brno. Tel: 05/4114 2463. E-mail: [email protected]; [email protected] 113
The penalty function is one of the most important part of each optimisation method. Generaly it is a function evaluating the quality of computing solution. Penalty function was chosen as the sum of absolute values of the differences of real values and the best computed values multiplied by suitable weight factors. The following parameters were chosen for in- duction motor optimisation.
Table 1. The parameters for generation process
Lower limit Upper limit Parameter De [mm] – – Outer stator diameter D [mm] – – Inner stator diameter li [mm] – – Rotor stator packet length B [T] 0.5 1.0 Air gap flux density
kdr1 [–] 0.6 0.75 (0.8) Slot loading of stator [mm] 0.2 0.4 Air gap length
1 3.0 15.0 Stator winding current density [A/mm2]
t 2.0 6.0 Rotor rod current density [A/mm2]
k 2.0 4.0 Rotor ring current density [A/mm2]
Bz [T] 1.6 2.0 Tooth flux density
q1 [–] 2.0 5.0 Number of stator slots per pole & phase Motor volume V [dm3] Nominal motor heating [K]
Nominal cos cos [–] Nominal motor efficiency [–]
Torque overload capacity mpn [–] The formula of penalty function is:
(GRi) = abs(kVV) + abs(k(0.89d – n)) + abs(kcos(1 – n)) + abs(k(1 – n))
+ abs(kmp(mp + 1– mpn)) () where k is a weight coefficient.
Tab 2. Optimized induction motor parameters
After Weight optimisation coefficient
V [dm3] 420 15
[K] 869 025 cos [-] 0818 76 114
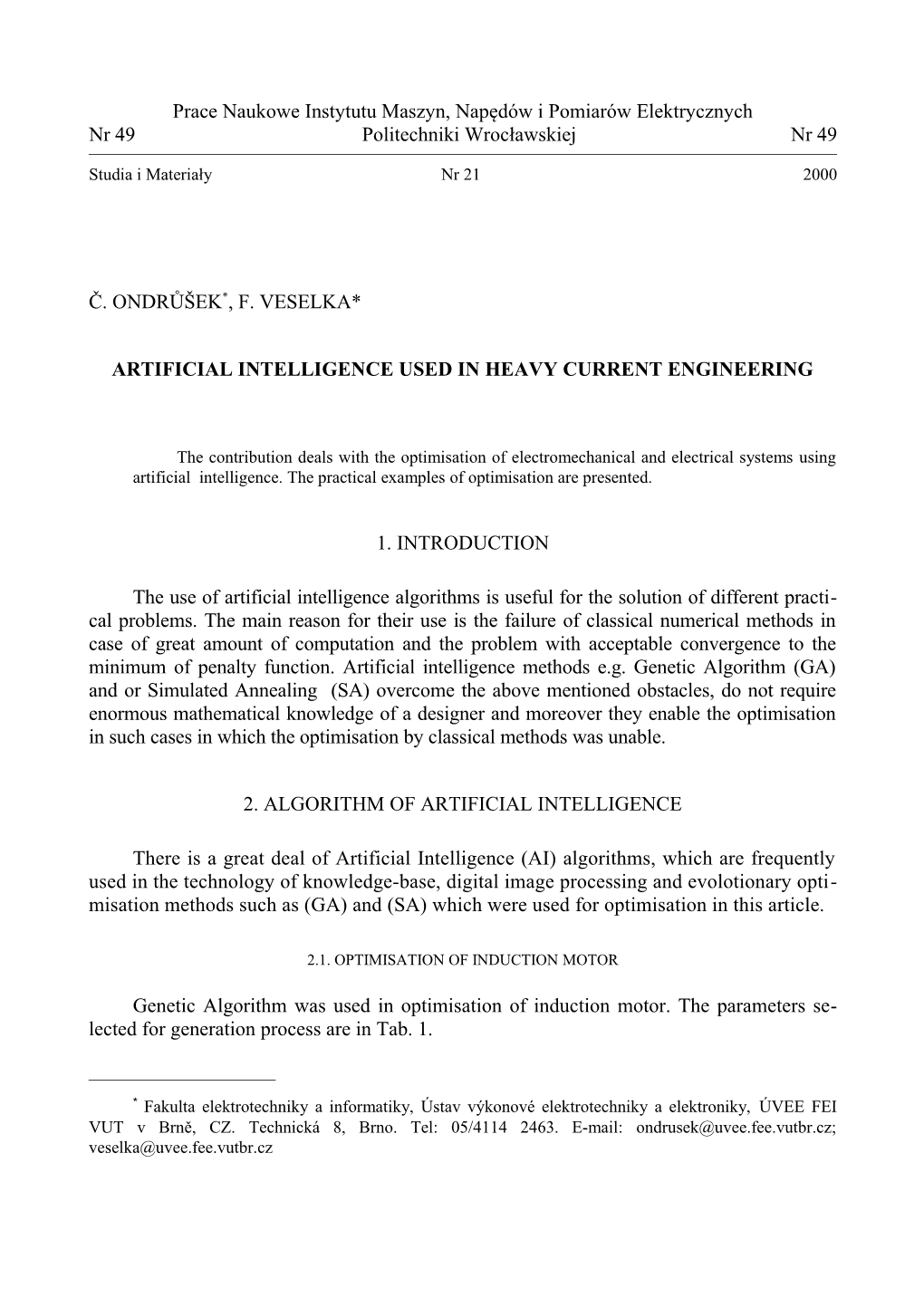
M [ Nm] I [ A ] cos , [-] 0843 90 110.0 30.0 1.0
99.0 27.0 0.9 M = f (s) mp [-] 171 7 88.0 24.0 I = f (s) 0.8
77.0 21.0 0.7
66.0 18.0 0.6
55.0 15.0 cos = f (s) 0.5
44.0 12.0 0.4
33.0 9.0 = f (s) 0.3
22.0 6.0 0.2
11.0 3.0 0.1
0.0 0.0 0.0 1.0 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 s [-]
Fig. 1. Induction motor characteristics
The optimisation was carried out with induction motor 5.5 kW, 380 V. The optimised parameters obtained are in Table 2.
2.2. OPTIMISATION OF CURRENT INSTRUMENT TRANSFORMER
Genetic Algorithm and Simulated Annealing were used for instrument current trans- former. The parameter selected for transformer optimisation are in Table 3.
Table 3. Selected parameters for optimisation Lower Upper Name limit limit F1 [Az] 100 1500 Primary loading
Correction_1 [z] 0 10 Secondary winding turns correction of measuring part of core
h_1 [mm] 10 120 Height of magnetic core of measuring part of core
%Py [%] 0 100 Percentual value of Py material in measuring part of core
Correction _2 [z] 0 10 Secondary winding turns correction of protecting part of core
The following parameters were used to form penalty function. Volume of transformer active parts V [dm3] Price of transformer active parts C [Kč]
Sum of current errors for 100% and 25% of nominal loading I1 [%]
Error of the real overcurrent number n1 [–] The sum of current error for nominal current and the total transformer
error for nominal overcurrent I2 [%]
Angle error 2 [%] The penalty function was used in the form (2):
2 2 kVV kCC kI1 I1 kn1(n0 n ) kI 2 I 2 k 2 2 , (2) where: n – real current number of measured part of an instrument transformer, 115
n0 – requested overcurrent number of measured part of an instrument transformer. The influence of every parameter on the total error of optimisation is given by adjust- ment of appropriate value of weight coefficient k. The optimisation procedure was applied to instrument transformers bank consisting of 15 transformers with the range (10–400) A of primary current. The aim of optimisation was the minimum volume of active materials or the minimum price.
2.2.1. OPTIMISATION OF TRANSFORMER BANK WITH RESPECT TO MINIMUM PRICE OF ACTIVE MATERIALS
Comparing optimised and nonoptimised transformers one can find out that the price dropped in average about 19% in each transformer. The price drop was of course accompa- nied by worsening of other parameters of penalty function, but nevertheless the parameters are kept in allowable boundaries given by czech standard. The results of optimisation of current transformer with nominal current I = 100 A are in Table 4.
Table 4. Results of optimisation of 100 A current transformer with respect of minimum price Without optimisation With optimisation Change [%] Weight coefficient Price [Kč] 1263 964 –23.67% 20 Volume [dm3] 5.672 4.843 –14.61% 1
I1 [%] 19.921 27.313 +37.10% 1
N1 [–] 5.235 5.465 +4.39% 1
I2 [%] 2.625 3.342 +27.31% 1
3.780 4.766 +26.08 % 1 min]
2.2.2. OPTIMISATION OF THE WHOLE TRANSFORMER BANK WITH RESPECT OF MINIMUM VALUE OF ACTIVE MATTERIALS
Comparing optimised and nonoptimised values was found that volume dropped about 22% per one transformer. The volume is accompanied by worsening of other parameters of penalty function as well. Nevertheless the parameters are in standard boundaries. The opti- misation results are in Table 5.
Table 5. Results of optimisation of 100 A current transformer with respect of minimum volume Without optimisation With optimisation Change [%] Weight coefficient
Price [Kč] 1263 1289 +2.06 % 1 3 Volume [dm ] 5.672 4.173 –26.43 % 20
I1 [%] 19.921 17.796 –10.66 % 1
N1 [–] 5.235 5.493 +4.93 % 1
I2 [%] 2.625 3.408 +29.83 % 1 116
3.780 4.924 +30.26 % 1 [min]
3. CONCLUSION
It hase been proved that GA and SA are able to be generaly used for optimisation. The only condition for application of GA and SA algorithms is the existence of functional rela- tionship between optimised parameters and penalty function. The main advantage of the ap- plication of GA and SA for optimisation is the minimum of mathematical knowledge and the easy fulfillment of a customer special requirements. Application of artificial intelligence for the solution of problems in synchronous and DC machines are now a matter of our interest. Special attention will be given to commuta- tion process optimisation.
REFERENCES
[1] ONDRŮŠEK Č., VESELKA F., BŘEZINA T., Neuronová síť jako model asynchronního motoru, Inter- national Workshop on Electrical Machines in Prague, 11–12 September 1996. [2] VESELKA F., ONDRŮŠEK Č., Artifical Neuron Networks for IM Simulation, MIS ‘96 International X. Symposium on Micromachines and Servodrives. [3] ŠTENCL Z., Diplomová práce, ÚESP FEI VUT v Brně, Brno 1996. [4] KREJČÍ P., Diplomová práce,ÚMT FS VUT v Brně, Brno 1998.
Pozn: Tento příspěvek byl zpracován s podporou grantových projektů GAČR 102/00/1586 a Cez: 322/98: 2622200010.