Pridgen Vermeer Robotics ATmega128 Revision 0
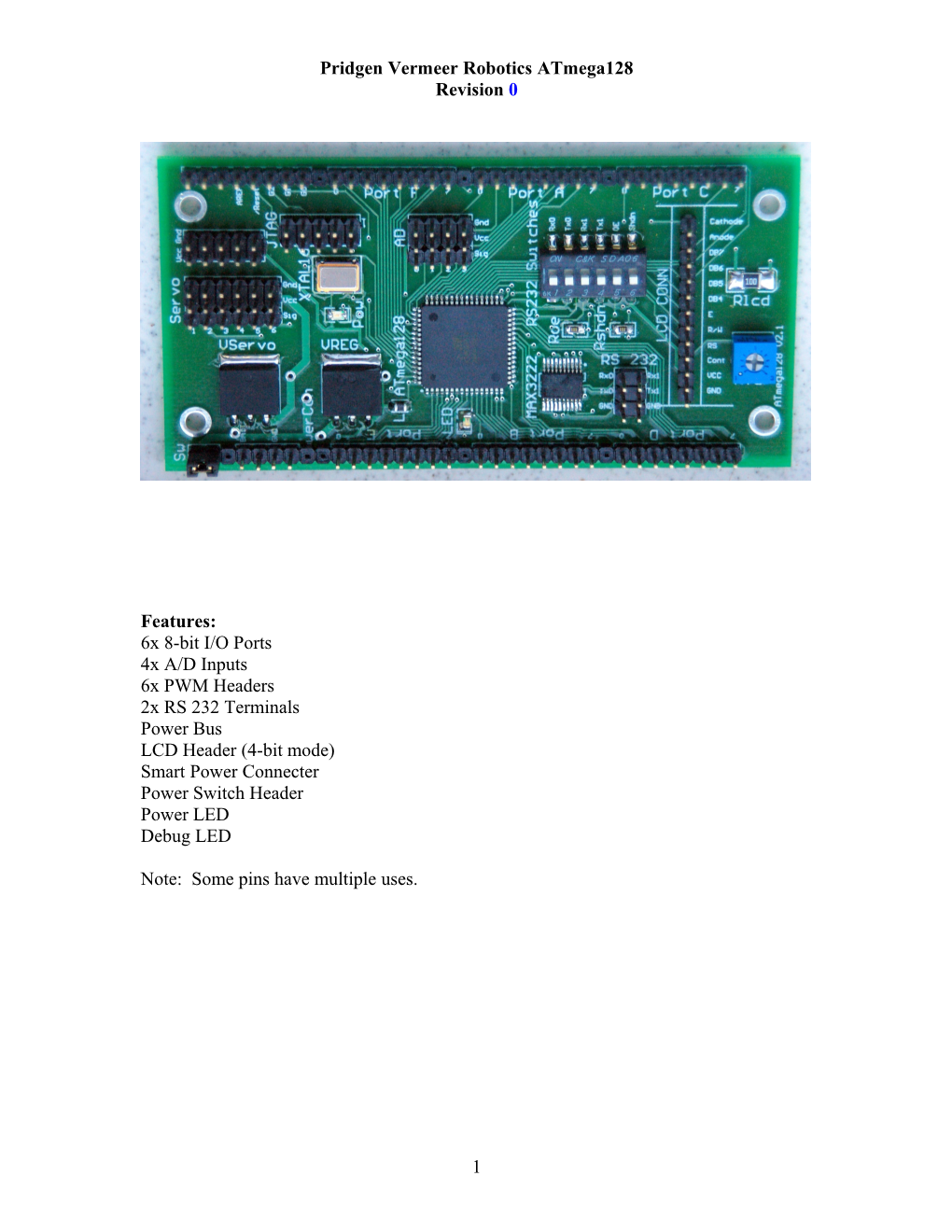
Features: 6x 8-bit I/O Ports 4x A/D Inputs 6x PWM Headers 2x RS 232 Terminals Power Bus LCD Header (4-bit mode) Smart Power Connecter Power Switch Header Power LED Debug LED
Note: Some pins have multiple uses.
1 Pridgen Vermeer Robotics ATmega128 Revision 0
Powering the Board
The Pridgen Vermeer Robotics ATmega128 Board uses a smart power connector to prevent battery polarity reversal. The power connector uses a 4-pin plug with one outside pin connected to the positive battery voltage and the opposite inside pin connected to the negative battery voltage (GND). See Figure 1.
Figure 1
Reversing the power connecter has no adverse effect because the battery voltage will not be electronically connected to the board. Next to the power connector is the Power Switch Header. The two pins must be shorted to provide power to the board. Using a standard jumper will work, but a cable with a SPDT switch is recommended. The cable and switch must be able to continuously carry 2 amps. When the power is plugged in correctly, the power LED will turn on.
The ATmega128 Board requires a 6-15V input for the regulators to supply the correct voltage to the components. All the electronics on the board use VCC = 5V.
Power Bus
A power bus is provided on the ATmega128 Board for powering external devices. VCC is regulated to 5V. Do not draw more than 500 mA through the power bus.
Figure 2
2 Pridgen Vermeer Robotics ATmega128 Revision 0
Programming the Board
The ATmega128 Board uses AVR JTAG programming. Connect the programmer to the JTAG port on the board and to your computer to establish a connection. The JTAG header has pin 1 labeled. Please ensure pin 1 on the cable is connected to pin 1 of the header.
Figure 3
Please ensure you connect the JTAG programmer to the JTAG header, NOT the power bus.
Figure 4
I/O Ports
The ATmega128 Board has six 8-bit Input/Output ports labeled Port A through Port F plus a 3-bit Input/Output port labeled G. The I/O ports are located on the sides of the ATmega128 board. When not used for alternate functions these ports behave as indicated in the ATmega128 datasheet for general I/O purposes.
3 Pridgen Vermeer Robotics ATmega128 Revision 0
I/O Pin Alternate Functions
A/D Converter
Pins F3..0 may be used as Analog inputs for the internal A/D converter of the ATmega128. Analog signals can be connected directly to pins F3..0 or to the A/D header which has VCC and GND pins available for powering sensors
Figure 5
JTAG Header
Pins F7..4 are used for JTAG programming and cannot be used for I/O or A/D conversion inputs. Be careful to ensure the JTAG programmer is connected to the JTAG header and not the Power Bus header.
RS 232
Pins E0 and E1 may be used as Rx1 and Tx1 respectively; and Pins D2 and D3 may be used Rx2 and Tx2 respectively. When using serial communication, the DIP switches OE and /SHDN should be ON. Also, the Rx and Tx switches corresponding to the RS 232 terminals used should be ON. When not using RS 232 communication, turn the switches OFF.
Figure 6 Figure 7
4 Pridgen Vermeer Robotics ATmega128 Revision 0
LCD Connector
All 8 pins of Port C may be used to run the LCD connector. When using the LCD, do NOT attempt to use Port C for any other function. The LCD connector provides all the necessary inputs and supply voltages for standard character LCDs. The contrast is changed using the potentiometer. The connector also supplies and regulates voltage for the LCD backlight. Please ensure the connected LCD will operate correctly with a 100Ω resistor as a backlight current limiter as some LCDs will require a different current limiting resistor.
Figure 8
Debug LED
Pin B0 is connected to the Debug LED on the board. When using B0 for normal I/O functions, ignore the LED. When using B0 for the debug LED, use active high signals (i.e. write a 1 to turn on the LED and a 0 to turn off the LED).
Figure 9
5 Pridgen Vermeer Robotics ATmega128 Revision 0
PWM/Servo Header
Pins E5..3 and B7..5 may be used for PWM generation. When using one of the pins for PWM, do not use it for general I/O. The Servo Header is internally connected to Pins E5..3 and B7..5 as shown in Table 1.
Figure 10
Servo Header 1 2 3 4 5 6 AtMega128 E5 E4 E3 B7 B6 B5 Table 1
Refer to the ATmega128 datasheet for PWM generation.
Table 2 shows all the alternate functions for pins on the Pridgen Vermeer Robotics AtMega128 Board. When using the alternate function, do NOT use the pin for general I/O. Pin Alternate Function B0 Debug LED B5 Servo 6 B6 Servo 5 B7 Servo 4 C7..0 LCD Connector E3 Servo 3 E4 Servo 2 E5 Servo 1 F0 A/D 0 F1 A/D 1 F2 A/D 2 F3 A/D 3 Table 2
6