Boden Grey Walter's
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Introduction to Robotics. Sensors and Actuators
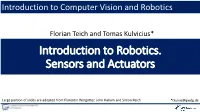
Introduction to Computer Vision and Robotics Florian Teich and Tomas Kulvicius* Introduction to Robotics. Sensors and Actuators Large portion of slides are adopted from Florentin Wörgötter, John Hallam and Simon Reich *[email protected] Perception-Action loop Environment Object Eyes Action Perception Arm Brain Perception-Action loop (cont.) Environment Sense Object Cameras Action Perception Robot-arm Computer Act Plan Outline of the course • L1.CV1: Introduction to Computer Vision. Thresholding, Filtering & Connected Coomponents • L2.CV2: Bilateral Filtering, Morphological Operators & Edge Detection • L3.CV3: Corner Detection & Non-Local Filtering • L4.R1: Introduction to Robotics. Sensors and actuators • L5.R2: Movement generation methods • L6.R3: Path planning algorithms • L7.CV4: Line/Circle Detection, Template Matching & Feature Detection • L8.CV5: Segmentation • L9.CV6: Fate Detection, Pedestrian Tracking & Computer Vision in 3D • L10.R4: Robot kinematics and control • L11.R5: Learning algorithms in robotics I: Supervised and unsupervised learning • L12.R6: Learning algorithms in robotics II: Reinforcement learning and genetic algorithms Introduction to Robotics History of robotics • Karel Čapek was one of the most influential Czech writers of the 20th century and a Nobel Prize nominee (1936). • He introduced and made popular the frequently used international word robot, which first appeared in his play R.U.R. (Rossum's Universal Robots) in 1921. 1890-1938 • “Robot” comes from the Czech word “robota”, meaning “forced labor” • Karel named his brother Josef Čapek as the true inventor of the word robot. History of robotics (cont.) • The word "robotics" also comes from science fiction - it first appeared in the short story "Runaround" (1942) by American writer Isaac Asimov. -

The Passage of a Transdisciplinary Movement Through an All-Too-Brief Moment in Time. Review of the Cybernetics Moment: Or Why We
Available online at www.sciencedirect.com ScienceDirect Cognitive Systems Research 43 (2017) 119–124 www.elsevier.com/locate/cogsys Book review The Passage of a Transdisciplinary Movement through an All-Too-Brief Moment in Time. Review of The Cybernetics Moment: or Why We Call Our Age the Information Age, Ronald R. Kline. Johns Hopkins (2015). 336 pp. Action editor: Peter Erdi Peter Cariani Center for Hearing Research, Boston University, United States Received 30 December 2016; accepted 31 December 2016 Available online 27 February 2017 1. Review bemoan the thin index and lack of a separate bibliography. Here is where the text-searchable, electronic Kindle edition The Cybernetics Moment focuses on the history of could come in handy. The wealth of details that Kline has cybernetics and information theory in the US as mid-20th amassed will create many small surprises and revelations in century research programs during the period of roughly the minds of those already familiar with cybernetics and 1940–1975. Kline’s scholarly yet highly readable book pur- information theory. But because relatively little effort is sues three major intertwined threads: cybernetics, informa- devoted to introducing the essential ideas of these move- tion theory and the information age. The text mainly ments, readers less familiar with these fields may find the presents the interactions between major players in these going a bit tougher. fields in a roughly chronological order. For the most part, The book complements a relatively small but growing the book’s trails revolve around Norbert Wiener, Claude historical literature on cybernetics research that includes Shannon, and the Macy conferences on cybernetics Steve Heims’ John von Neuman and Norbert Wiener: From (1946–1953). -

Coming Close: What an Interview Can Reveal About Creativity in the Contemporary Art Music Composer
JOURNAL OF OF RESEARCH ONLINE MusicA JOURNAL OF THE MUSIC COUNCIL OF AUSTRALIA COMING CLOSE: WHAT AN INTERVIEW CAN REVEAL ABOUT CREATIVITY IN THE CONTEMPORARY ART MUSIC COMPOSER Introduction RICHARD WILLGOSS he term ‘creativity’, used linguisticly in a musical context, gains a first significance by being used to describe a value judgement on a composer’s output, both as a score and a performance. The relevance of an investigation ■ Sydney Conservatorium of Music Tinto why and how the term is used in this context then gains a second significance University of Sydney in that, buried within being creative, are notions as to why some music is selectively Sydney , New South Wales valued, rather than all of what is on offer. These two premises find weak support from Australia, 2000 parametric approaches to their substantiation. However, gathering and interpreting information in a rational, sensible way should always remain an important step to understanding the subject matter. The major difficulty in resolution that arises is with assumptions made about what might be found, and upon what epistemology it should be based. [email protected] Art music composers create compositions that mainly sit as innovations on or extensions to the western classical music tradition. The use of the term in this research is not meant to imply any elitism or intellectual, social or cultural bias. However, it is innovations on, and links that can be made to, the present classical tradition (or lack of them) that often give rise to calling art music creative. Composers who choose to compose in this manner often devote much of their compositional efforts to this www.jmro.org.au end. -
Neuro Informatics 2020
Neuro Informatics 2019 September 1-2 Warsaw, Poland PROGRAM BOOK What is INCF? About INCF INCF is an international organization launched in 2005, following a proposal from the Global Science Forum of the OECD to establish international coordination and collaborative informatics infrastructure for neuroscience. INCF is hosted by Karolinska Institutet and the Royal Institute of Technology in Stockholm, Sweden. INCF currently has Governing and Associate Nodes spanning 4 continents, with an extended network comprising organizations, individual researchers, industry, and publishers. INCF promotes the implementation of neuroinformatics and aims to advance data reuse and reproducibility in global brain research by: • developing and endorsing community standards and best practices • leading the development and provision of training and educational resources in neuroinformatics • promoting open science and the sharing of data and other resources • partnering with international stakeholders to promote neuroinformatics at global, national and local levels • engaging scientific, clinical, technical, industry, and funding partners in colla- borative, community-driven projects INCF supports the FAIR (Findable Accessible Interoperable Reusable) principles, and strives to implement them across all deliverables and activities. Learn more: incf.org neuroinformatics2019.org 2 Welcome Welcome to the 12th INCF Congress in Warsaw! It makes me very happy that a decade after the 2nd INCF Congress in Plzen, Czech Republic took place, for the second time in Central Europe, the meeting comes to Warsaw. The global neuroinformatics scenery has changed dramatically over these years. With the European Human Brain Project, the US BRAIN Initiative, Japanese Brain/ MINDS initiative, and many others world-wide, neuroinformatics is alive more than ever, responding to the demands set forth by the modern brain studies. -

Critical Mass: Collectivity and Collaboration in the History Of
CRITICAL MASS: COLLECTIVITY AND COLLABORATION IN THE HISTORY OF MULTI-AGENT INTELLIGENT SYSTEMS By Rachel Bergmann Department of Art History and Communication Studies McGill University, Montreal November 2019 A thesis submitted to McGill University in partial fulfillment of the requirements of the degree of Master of Arts in Communication Studies © Rachel Bergmann 2019 Table of Contents List of Figures i Abstract/Résumé ii Acknowledgements iii Introduction 1 The Need for a Longer History 3 Notes on Terminology 13 Chapter Outline 15 Chapter 1: “The Vietnamese Don’t Live on the Quarter System”: Countercultural Politics at SRI and SAIL 18 Building a Lab’s Culture 21 “Zoe Pictures 1971” 26 The Other Lab: SRI and the Anti-War Movement 36 Conclusion 43 Chapter 2: Critical Mass: Protocol Feminism in AI Research 45 Forming the network 51 People and language itself: feminist AI research protocols 61 Conclusions and contradictions 65 Chapter 3: Whose SharedPlans? Scripts, Collaboration, and Feminist AI Research 68 Scripts, Plans, and SharedPlans 71 Going off-script: resonances in STS and feminist theory 81 Destabilizing the master-slave analogy in AI 85 Multi-Agent Systems and the limits of feminist AI research 89 Conclusion 93 Bibliography 108 Figures Figure 1. Home page of SAILDART.org. 20 Figure 2. Photo of the D.C. Power Building. 23 Figure 3. “Engineering School Seeks to Enrol More Women.” The Stanford Daily, 1973. 27 Figure 4. “Join the Women’s Liberation.” The Stanford Daily, 1969. 28 Figure 5. “Make $3,000 by Jply If You Are Female, Attractive, Uninhibited.” The Stanford Daily, 1971. 32 Figure 6. -

For Biological Systems, Maintaining Essential Variables Within Viability Limits Is Not Passive
Second-Order Cybernetics Maintaining Essential Variables Is Not Passive Matthew Egbert « 8 » Proponents of the enactive ap- sible failure to do so will necessarily result “ the survival standard itself is inadequate for proach agree that the homeostat’s double in the homeostat’s death” (§10). However, at the evaluation of life. If mere assurance of per- feedback architecture made an important the level of its physical body, an organism is manence were the point that mattered, life should contribution, but at the same time they always far-from-equilibrium with respect to not have started out in the first place. It is essen- struggle to overcome its limitations (Ike- its environment. Falling into an equilibrium tially precarious and corruptible being, an ad- gami & Suzuki 2008). Franchi briefly refers is the same as dying, because the organism venture in mortality, and in no possible form as to evolutionary robotics models inspired by would lose its ability to do the work of self- assured of enduring as an inorganic body can be. this ultrastability mechanism, but he does producing its own material identity, i.e., the Not duration as such, but ‘duration of what?’ is the not mention that further progress has been very process that ensures that the double question.” (Jonas 2001: 106) difficult. Ezequiel Di Paolo (2003) showed feedback loop between behavior and inter- that implementing Ashby’s mechanism is a nal homeostasis is intrinsically connected Tom Froese graduated with a D.Phil. in cognitive science significant step toward more organism-like within a whole. Only non-living matter can from the Univ. -

1 Jeffrey Gu, Nicolas Wilmer Professor Evan Donahue ISS390S 12/7/18 the Evolution of the Roomba and the AI Field Recently, the C
1 Jeffrey Gu, Nicolas Wilmer Professor Evan Donahue ISS390S 12/7/18 The Evolution of the Roomba and the AI Field Recently, the consumer marketplace has been flooded with a number of intelligent technologies, including many that integrate virtual assistants such as Amazon’s Alexa and Apple’s Siri. Even household appliances like Samsung’s newest refrigerators integrate “smart” technologies. For many in the tech world, artificial intelligence (AI) has long represented the future of cybernetics and technology. For many years, however, AI technologies were not marketed to the average consumer. Rather, most AI companies were focused on corporate, military and governmental applications. Thus, there seemed to be a marked difference in expectations for AI between ordinary people and those involved in the AI field. When asked about the potential of AI, many people would passionately discuss its future applications in education and healthcare.1 However, Mitch Waldrop during a panel discussion featuring several prominent figures in the AI field noted that these applications “seem to be in roughly the inverse priority to what AI people give these subjects.”2 This disconnect began to disappear in 2002, when iRobot, a company founded in 1990 by three former MIT AI Lab scientists, released the Roomba, a robot that autonomously roams and cleans the floors of your house. The commercial success of the Roomba and its business model brought the AI conversation to households around the world. 1 McDermott, Drew, M. Mitchell Waldrop, B. Chandrasekaran, John McDermott, and Roger Schank. 1985. “The Dark Ages of AI: A Panel Discussion at AAAI-84.” AI Magazine 6 (3): 122–122. -
Understanding the Process of Creation: a New Approach DOI: 10.7595/Management.Fon.2017.0021
Management: Journal of Sustainable Business and Management Solutions in Emerging Economies 2017/22(3) Gennady Shkliarevsky1 Bard College, USA Understanding the Process of Creation: a New Approach DOI: 10.7595/management.fon.2017.0021 Abstract: Our contemporary civilization increasingly relies on creative approaches and solutions. This grow- ing dependence makes issues of control, regulation and management of the process of creation ever more important.This article finds two major current theoretical perspectives on creativity and the process of creation to be vulnerable in one important respect: their explanation of the production of disequilibrium, which plays a singularly important role in the process of creation, does not pass the test of rational justification. This arti- cle suggests that the production of disequilibrium is intimately related to equilibration — the essential opera- tion of rational thought processes. The emphasis on the role equilibration makes a rational justification of the production of disequilibrium possible. The new theoretical perspective opens the path toward a comprehen- sive and objective understanding of the process of creation, which is the main condition for regulating, con- trolling, and managing this process. Key words: Creativity, the process of creation, equilibration, the production of disequilibrium, Margaret Boden, computation. JEL classification: B59,O31 1. Introduction Every age has its defining characterization. If one had to choose a characterization for our age, the most likely candidate would be “the era of creativity” (Kirstetter et al., 2013). Creativity is at the center of public atten- tion. It is the subject of discussions by politicians, scientists, business people, media and public figures, and by ordinary people. -

Intelligence Without Reason
Intelligence Without Reason Rodney A. Brooks MIT Artificial Intelligence Lab 545 Technology Square Cambridge, MA 02139, USA Abstract certain modus operandi over the years, which includes a particular set of conventions on how the inputs and out- Computers and Thought are the two categories puts to thought and reasoning are to be handled (e.g., that together define Artificial Intelligence as a the subfield of knowledge representation), and the sorts discipline. It is generally accepted that work in of things that thought and reasoning do (e.g,, planning, Artificial Intelligence over the last thirty years problem solving, etc.). 1 will argue that these conven has had a strong influence on aspects of com- tions cannot account for large aspects of what goes into puter architectures. In this paper we also make intelligence. Furthermore, without those aspects the va the converse claim; that the state of computer lidity of the traditional Artificial Intelligence approaches architecture has been a strong influence on our comes into question. I will also argue that much of the models of thought. The Von Neumann model of landmark work on thought has been influenced by the computation has lead Artificial Intelligence in technological constraints of the available computers, and particular directions. Intelligence in biological thereafter these consequences have often mistakenly be systems is completely different. Recent work in come enshrined as principles, long after the original im behavior-based Artificial Intelligence has pro petus has disappeared. duced new models of intelligence that are much closer in spirit to biological systems. The non- From an evolutionary stance, human level intelligence Von Neumann computational models they use did not suddenly leap onto the scene. -
Neurorobotics Lecture
Neurorobotics An introduction Marc-Oliver Gewaltig In this lecture you’ll learn 1. What is Neurorobotics 2. Examples of simple neurorobots 1. attraction and avoidance 2. reflexes vs. learned behavior 3. The sensory-motor loop 4. Learning in neurorobotics 1. unsupervised learning for sensory representations 2. reinforcement learning for action learning What is Neurorobotics Neurorobotics, is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. https://en.wikipedia.org/wiki/Neurorobotics Neurorobotics: Embodied in silico neuroscience Spinal Cord Reconstructed Reflexes spinal cord/ CDPs brain models Embodiment and virtual environments Musculo-skeletal system – compliant actuators and mechanics Starting simple: Valentino Braitenberg’s Vehicles Valentino Braitenberg (1926-2011) Braitenberg, V. (1984). Vehicles: Experiments in Photo: Alfred Wegener, commons.wikimedia.org synthetic psychology. Cambridge, MA: MIT Press. Vehicle 1 1 Vehicle 2a 1 2a Vehicle 2b 1 2a 2b Vehicle 3 1 2a 2b 3 Vehicle 3 1 2a 2b 3 Exercise How will vehicle 3 move? Generalizing the Braitenberg vehicle Exercise Using weights in {-1,+1}, which weight configurations implement the vehicles 2a, 2b, and 2c? speed light Biological and Non-biological bodies Sensors: cameras, microphones, etc Artificial brain with neurons Servo motors with wheels Biological and Non-biological bodies Sensors: cameras, microphones, etc encode Artificial brain with neurons Servo motors with wheels Biological and Non-biological bodies Sensors: cameras, microphones, etc encode Artificial brain with neurons Servo motors with wheels decode Perception Action Vision Behaviors Hearing Smell Action Central pattern generators Touch Perception Reflexes Temperature Vestibular Muscle contraction Proprioception Perception Short-term Long-term Action memory memory Drives & Working Vision Cognitive Motivation memory control Action Behaviors Sensor Reward & selection Hearing fusion punish. -
The Cybernetic Brain
THE CYBERNETIC BRAIN THE CYBERNETIC BRAIN SKETCHES OF ANOTHER FUTURE Andrew Pickering THE UNIVERSITY OF CHICAGO PRESS CHICAGO AND LONDON ANDREW PICKERING IS PROFESSOR OF SOCIOLOGY AND PHILOSOPHY AT THE UNIVERSITY OF EXETER. HIS BOOKS INCLUDE CONSTRUCTING QUARKS: A SO- CIOLOGICAL HISTORY OF PARTICLE PHYSICS, THE MANGLE OF PRACTICE: TIME, AGENCY, AND SCIENCE, AND SCIENCE AS PRACTICE AND CULTURE, A L L PUBLISHED BY THE UNIVERSITY OF CHICAGO PRESS, AND THE MANGLE IN PRAC- TICE: SCIENCE, SOCIETY, AND BECOMING (COEDITED WITH KEITH GUZIK). THE UNIVERSITY OF CHICAGO PRESS, CHICAGO 60637 THE UNIVERSITY OF CHICAGO PRESS, LTD., LONDON © 2010 BY THE UNIVERSITY OF CHICAGO ALL RIGHTS RESERVED. PUBLISHED 2010 PRINTED IN THE UNITED STATES OF AMERICA 19 18 17 16 15 14 13 12 11 10 1 2 3 4 5 ISBN-13: 978-0-226-66789-8 (CLOTH) ISBN-10: 0-226-66789-8 (CLOTH) Library of Congress Cataloging-in-Publication Data Pickering, Andrew. The cybernetic brain : sketches of another future / Andrew Pickering. p. cm. Includes bibliographical references and index. ISBN-13: 978-0-226-66789-8 (cloth : alk. paper) ISBN-10: 0-226-66789-8 (cloth : alk. paper) 1. Cybernetics. 2. Cybernetics—History. 3. Brain. 4. Self-organizing systems. I. Title. Q310.P53 2010 003’.5—dc22 2009023367 a THE PAPER USED IN THIS PUBLICATION MEETS THE MINIMUM REQUIREMENTS OF THE AMERICAN NATIONAL STANDARD FOR INFORMATION SCIENCES—PERMA- NENCE OF PAPER FOR PRINTED LIBRARY MATERIALS, ANSI Z39.48-1992. DEDICATION For Jane F. CONTENTS Acknowledgments / ix 1. The Adaptive Brain / 1 2. Ontological Theater / 17 PART 1: PSYCHIATRY TO CYBERNETICS 3. -

What Has Life Got to Do with Mind? Or Vice Versa? (Thoughts Inspired by Discussions with Margaret Boden.)
Talk presented at Workshop for Margaret Boden, Sussex University 22 May 2009 What Has Life Got To Do With Mind? Or vice versa? (Thoughts inspired by discussions with Margaret Boden.) See: M. A. Boden, Autopoesis and life, in Cognitive Science Quarterly, 2000, 1, 1, pp. 115–143, M. A. Boden, 2006, Mind As Machine: A history of Cognitive Science (Vols 1–2), OUP 2006 Chapters 15.x.b and 16.x Aaron Sloman http://www.cs.bham.ac.uk/∼axs/ These slides will go into my ‘talks’ directory: http://www.cs.bham.ac.uk/research/projects/cogaff/talks/#maggie PLACE DATE Slide 1 Last revised: November 13, 2009 Schedule for the Meeting Friday 22nd May 2009, Arts Building B University of Sussex, Falmer 14:00-14:45 Aaron Sloman 14:45-15:30 Ron Chrisley 15:30-16:00 discussion 1 16:00-16:30 break 16:30-17:15 Mike Wheeler 17:15-18:00 Steve Torrance & Blay Whitby 18:00-18:30 discussion 2 Chairperson: Paul Davies Organiser: Tanja Staehler PLACE DATE Slide 2 Last revised: November 13, 2009 Margaret Boden Some of the information on her web site Fellow (and former Vice-President) of the British Academy – and Chairman of their Philosophy Section until July 2002. Member of the Academia Europaea. Fellow of the American Association for Artificial Intelligence (AAAI). Fellow of the European Coordinating Committee for Artificial Intelligence (ECCAI). Life Fellow of the UK’s Society for Artificial Intelligence and the Simulation of Behaviour (SSAISB). Member of Council of the Royal Institute of Philosophy. Former Vice-President (and Chairman of Council) of the Royal Institution of Great Britain.